







最近在研究自平衡
Hiwondre原来的自平衡代码有以下缺点:
- imu data 不准,并且没有用mean/median filter
- 内置的基于旋转矩阵的自平衡代码最初是给12 dof的机器人设计的,在8dof上的应用很随便
- 先把roll强行设置为0, 然后只用pitch应用一次旋转矩阵
- 之后用pid controller单独计算一次roll compensation,然后分别加给左右脚
在b站上找到了‘灯哥开源’ 的8dof 机器人的开源代码,研究了一下发现他的trot效果好很多,是基于物理角度计算
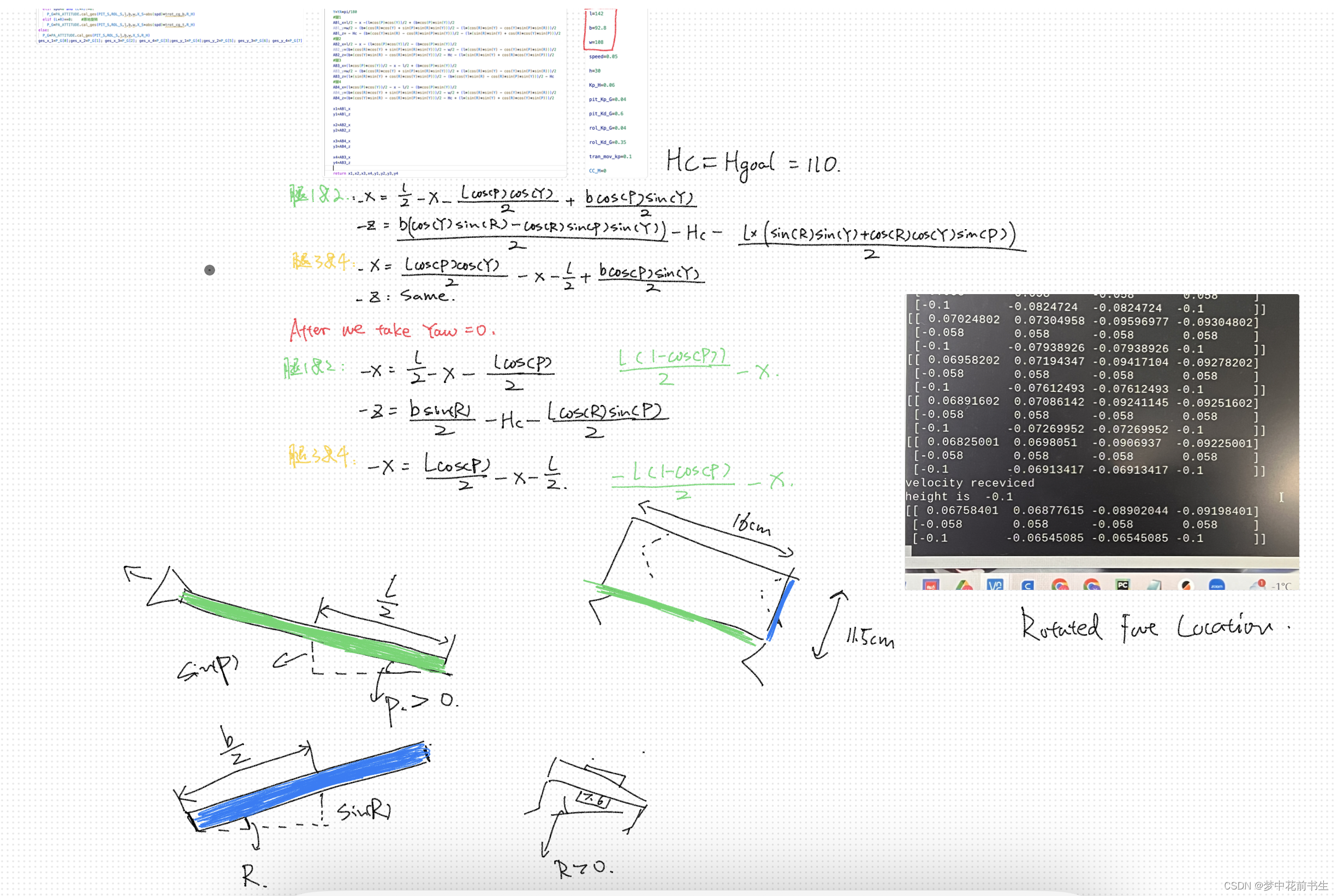
给pitch和roll作为输入,结合自身的物理dimension, 计算出每只脚需要抬起的角度
下面是一个简单的示意图














 174
174











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









