






,非线性离散ADRC,二阶非线性自抗扰控制器,控制简单的传递函数,直接内部调参就行
ID:2525654741425966
拿下机场
非线性离散自抗扰控制器(Nonlinear Discrete Active Disturbance Rejection Control,简称ADRC)是一种用于控制简单传递函数的高级控制算法。它的特点是能够通过直接进行内部调参,实现对系统的精确控制。
在传统的控制算法中,使用线性传递函数进行系统建模,然后设计相应的控制器来实现目标控制。然而,在实际应用中,系统经常会受到多种扰动的影响,这些扰动包括环境噪声、负载变化以及系统参数的变动等。这些扰动会导致传统控制算法的性能下降,甚至失效。因此,研究一种能够有效抑制各种扰动的控制算法是非常重要的。
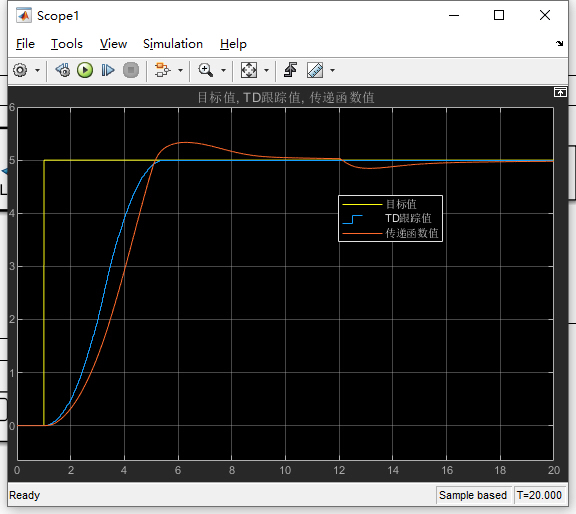
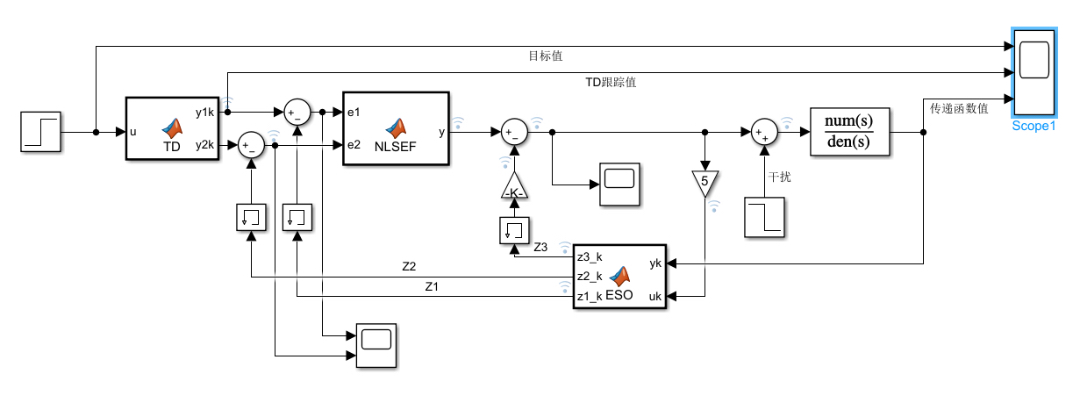
ADRC算法通过引入自抗扰观测器和非线性补偿器,实现对系统扰动的在线估计和抑制。在非线性离散ADRC中,采用二阶非线性自抗扰控制器的结构,它能够更好地适应非线性系统和非线性扰动的特点。
ADRC的核心思想是将系统的内部扰动建模为一个未知的非线性函数,然后利用自抗扰观测器对该扰动进行估计和补偿。同时,通过引入非线性补偿器,对系统的非线性特性进行补偿。这种方法不仅可以抑制外部扰动的影响,还可以提高系统的鲁棒性和稳定性。
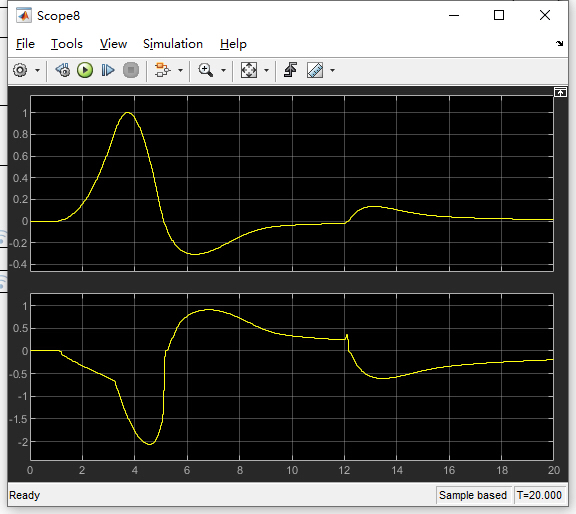
在具体实现时,非线性离散ADRC算法首先需要对系统进行离散化处理。然后,通过系统输出和控制输出的误差,利用自抗扰观测器对扰动进行估计和补偿。最后,通过非线性补偿器对系统的非线性特性进行补偿,以实现对系统的精确控制。
与传统控制算法相比,非线性离散ADRC具有以下优势:
首先,它能够抑制各种扰动的影响,包括环境噪声、负载变化以及系统参数的变动等。这使得系统具有更好的鲁棒性和稳定性。
其次,非线性离散ADRC能够更好地适应非线性系统和非线性扰动的特点。通过引入非线性补偿器,可以实现对系统的非线性特性的精确控制。
此外,非线性离散ADRC的设计简单直观,只需要进行直接内部调参就可以实现对系统的控制。这极大地降低了控制系统的设计和调试的难度。
总的来说,非线性离散ADRC是一种用于控制简单传递函数的高级控制算法。它通过自抗扰观测器和非线性补偿器的引入,实现对系统扰动的在线估计和抑制,从而实现对系统的精确控制。与传统控制算法相比,非线性离散ADRC具有更好的鲁棒性和稳定性,并且设计简单直观。因此,它具有广泛的应用前景,在工业控制和自动化领域具有重要的意义。
相关的代码,程序地址如下:http://coupd.cn/654741425966.html
















 460
460

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









