







基于神经网络的倒立摆控制系统设计
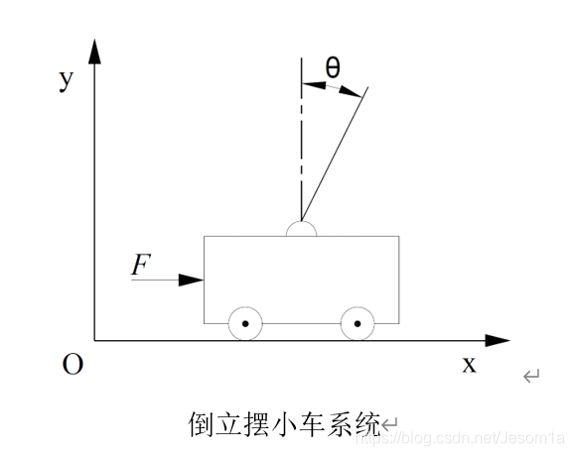
问题:一级倒立摆装置如图所示。装在小车上的倒立摆在水平力的作用下,通过控制小车的运动速度使偏转角θ为0,即可使倒立摆直立起来。
一、参数分析
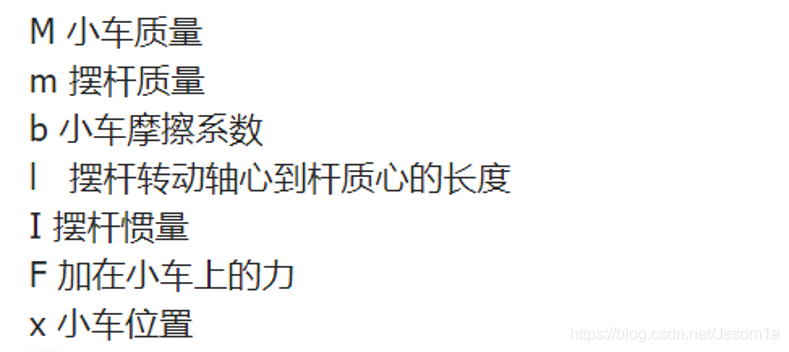 全部的主要参数就是以上七个,其中需要用到的是小车质量M、摆杆质量m、摆杆转动轴心到杆质心的长度l以及摆杆惯量!
全部的主要参数就是以上七个,其中需要用到的是小车质量M、摆杆质量m、摆杆转动轴心到杆质心的长度l以及摆杆惯量!
二、受力分析(不多赘述,百度一大堆,直接进入数据采集模块)
三、数据采集
这里首先我们打开matlab的help参考页面的搜索Inverted pendulum找到以下这个matlab自带的modol。(这个modol其实就是基于LQR控制的一个倒立摆小车模型)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2818
2818











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









