






介绍
IIC通信属于多主机从机通信模型,半双工通信,有两根通信线,SDA:用于表示数据,SCL:用于数据收发的同步
每个设备都有自己的独立地址,主机利用该地址进行通信。
时基单元
起始信号

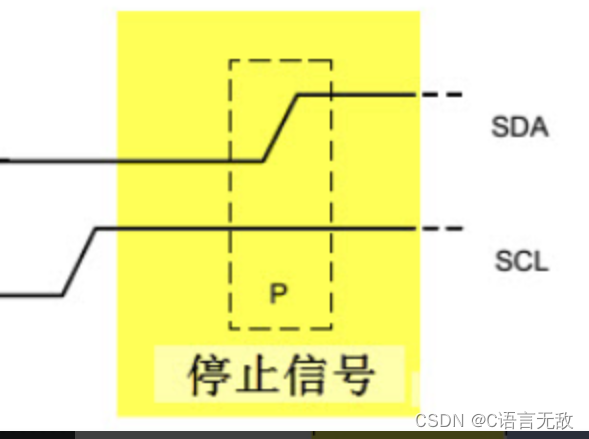
停止信号
发送字节
接收字节

发送应答
接收应答
软件模拟IIC
#include "stm32f10x.h"
#include "Delay.h"
// 时钟线
#define SCL_PORT GPIOB
#define SCL_PIN GPIO_Pin_10
// 数据线
#define SDA_PORT GPIOB
#define SDA_PIN GPIO_Pin_11
// 时钟线写操作,置电平
void I2C_W_SCL(uint8_t BitValue)
{
GPIO_WriteBit(SCL_PORT, SCL_PIN, (BitAction)BitValue);
Delay_us(10);
}
// 数据线写操作,置电平
void I2C_W_SDA(uint8_t BitValue)
{
GPIO_WriteBit(SDA_PORT, SDA_PIN, (BitAction)BitValue);
Delay_us(10);
}
// 读数据线数据
uint8_t I2C_R_SDA(void)
{
uint8_t BitValue;
BitValue = GPIO_ReadInputDataBit(SDA_PORT, SDA_PIN);
Delay_us(10);
return BitValue;
}
/// @brief 初始化I2C,模拟IIC(软件IIC)
/// @param
void MyI2C_init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_10 | GPIO_Pin_11);
}
// 以下是6个时序基本单元
/// @brief 起始位
/// @param
void MyI2C_Start(void)
{
/*
SDA : -------____
SCL : -----------
*/
I2C_W_SDA(1); // 根据时序图释放SDA
I2C_W_SCL(1); // 根据时序图释放SCL
I2C_W_SDA(0); // 拉低SDA,根据时序图编写基本时序单元
I2C_W_SCL(0); // 拉低时钟线,保证时序统一
}
/// @brief 停止位
/// @param
void MyI2C_Stop(void)
{
/*
SDA : ____-------
SCL : -----------
*/
I2C_W_SDA(0); // 先保证数据线为低电平
I2C_W_SCL(1);
I2C_W_SDA(1);
}
/// @brief 发送一个字节
/// @param Byte 发送的字节
void MyI2C_SendByte(uint8_t Byte)
{
// 在时钟低电平时将数据放入数据线,再将时钟线拉高读取数据
// IIC使用MSB(高位先行传输,按一个位一个位传输)
for (uint32_t i = 0; i < 8; i++)
{
// I2C_W_SDA(Byte & 0x80); // 取最高位 0x80 =>> 1000 0000
I2C_W_SDA(Byte & (0x80 >> i));
I2C_W_SCL(1);
I2C_W_SCL(0);
}
}
/// @brief 接收一个字节
/// @param
/// @return 返回数据线上接收到的字节
uint8_t MyI2C_RecvByte(void)
{
uint8_t Byte = 0x00;
I2C_W_SDA(1); // 转交控制权给从机
for (uint32_t i = 0; i < 8; i++)
{
I2C_W_SCL(1); // 时钟高电平读取从机发送的数据
/* 判断数据并拼接到一起返回字符串 */
if (I2C_R_SDA() == 1)
{
Byte |= (0x80 >> i); // 从高位向地位依次运算,得到结果
}
I2C_W_SCL(0); // 时钟低电平等待从机发送的数据
}
return Byte;
}
/// @brief 发送应答
/// @param AckBit
void MyI2C_SendAck(uint8_t AckBit)
{
// 刚开始时钟线是低电平
I2C_W_SDA(AckBit); // 发送bit
I2C_W_SCL(1); // 从机读取电平
I2C_W_SCL(0); // 恢复低电平
}
/// @brief 读取应答信息
/// @param
/// @return 返回读取到的应答信息
uint8_t MyI2C_RecvAck(void)
{
uint8_t AckBit; // 存放信息
I2C_W_SDA(1);
I2C_W_SCL(1); // 时钟线
AckBit = I2C_R_SDA(); // 读取bit
I2C_W_SCL(0); // 时钟线
return AckBit;
}
硬件配置
/* enable RCC */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/* GPIO_INIT */
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_OD; // 设置为复用开漏输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
/* I2C_INIT */
I2C_DeInit(I2C1);
I2C_InitTypeDef I2C_InitStruct;
I2C_InitStruct.I2C_Ack = I2C_Ack_Enable;
I2C_InitStruct.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; // 设置从机地址位数;
I2C_InitStruct.I2C_ClockSpeed = 400000; // lower 400K
I2C_InitStruct.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStruct.I2C_Mode = I2C_Mode_I2C; //
I2C_InitStruct.I2C_OwnAddress1 = 0x30; // 主机自己的IIC地址
I2C_Init(I2C1, &I2C_InitStruct);
/* I2C enable */
I2C_Cmd(I2C1, ENABLE);














 6264
6264











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









