







ROS机器人编程
ROS中的核心概念
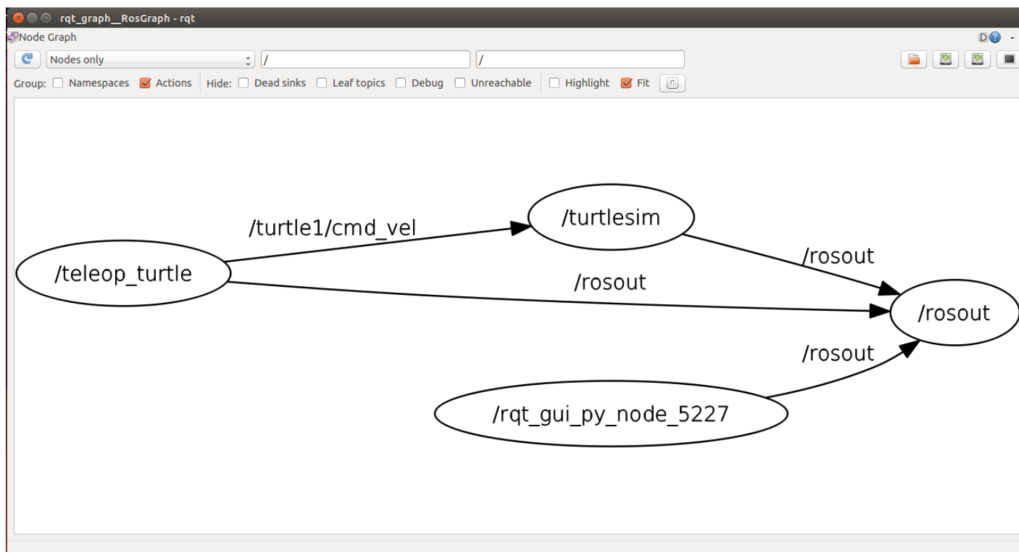
ROS的通信机制
在ROS中结点是最小单元,比如说机器人的遥控器可以作为一个控制结点,机器人上的摄像头也可以看作一个结点,ROS通过协调各个结点来实现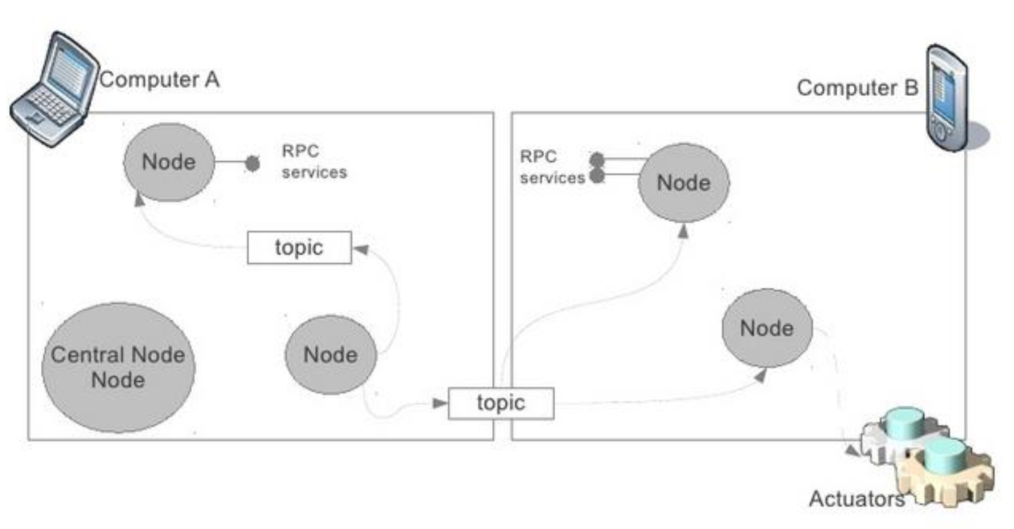
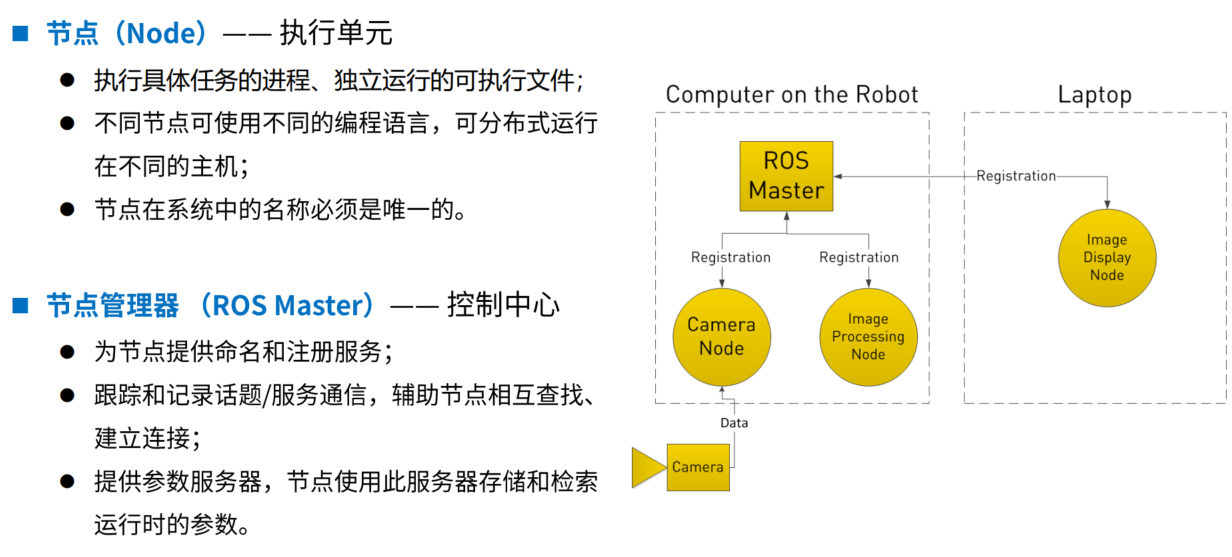
在启动任何ROS结点之前,都必须先启动ROS Master
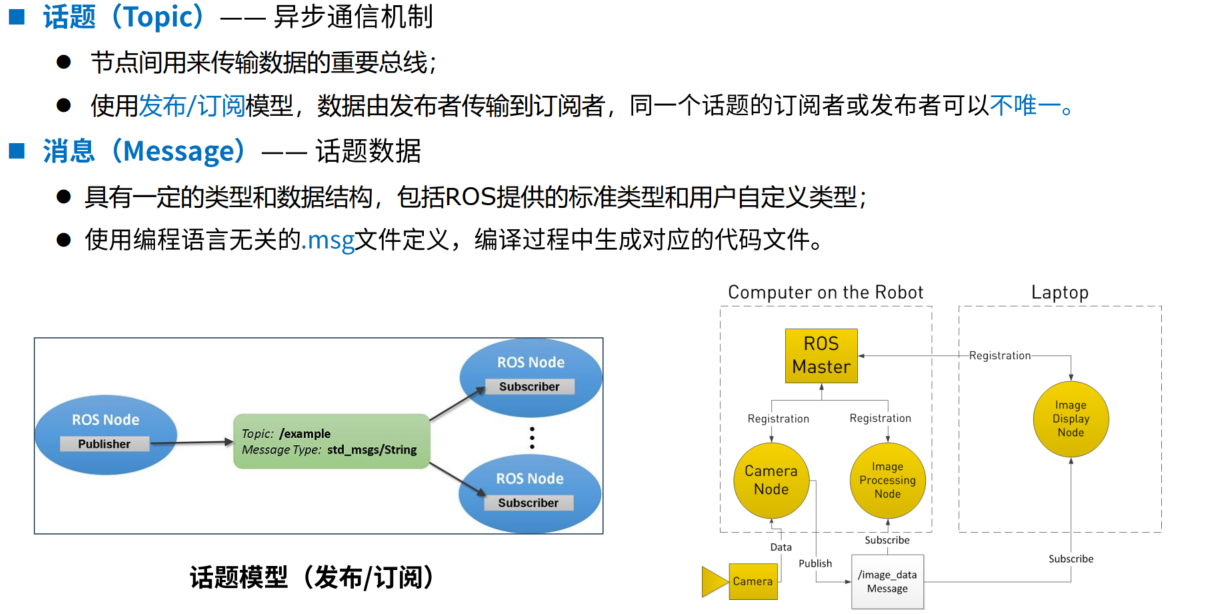
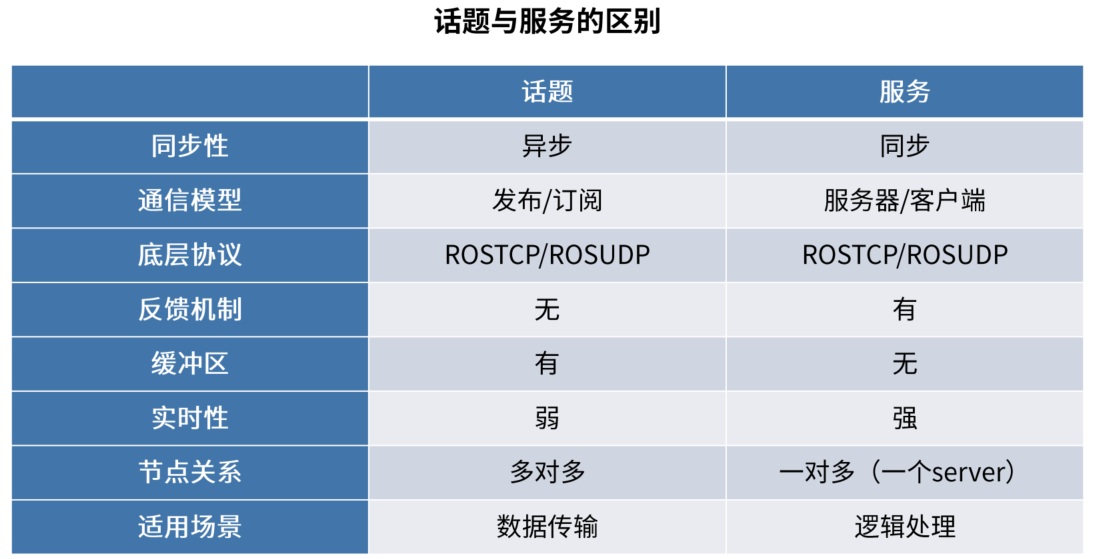
话题通信
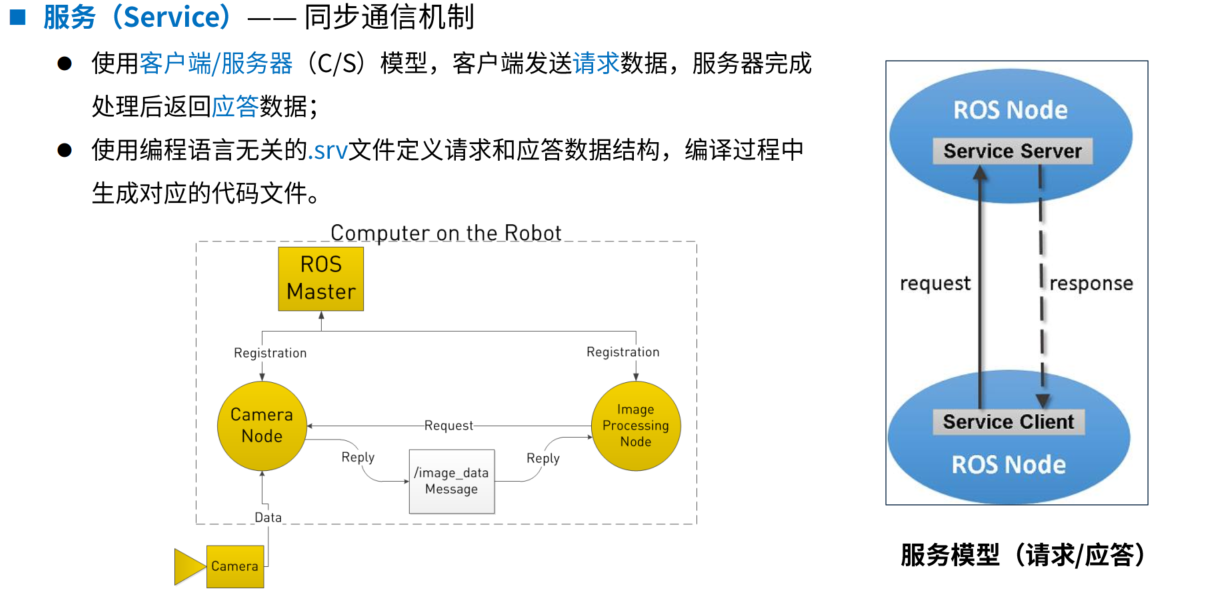
服务器客户端通信
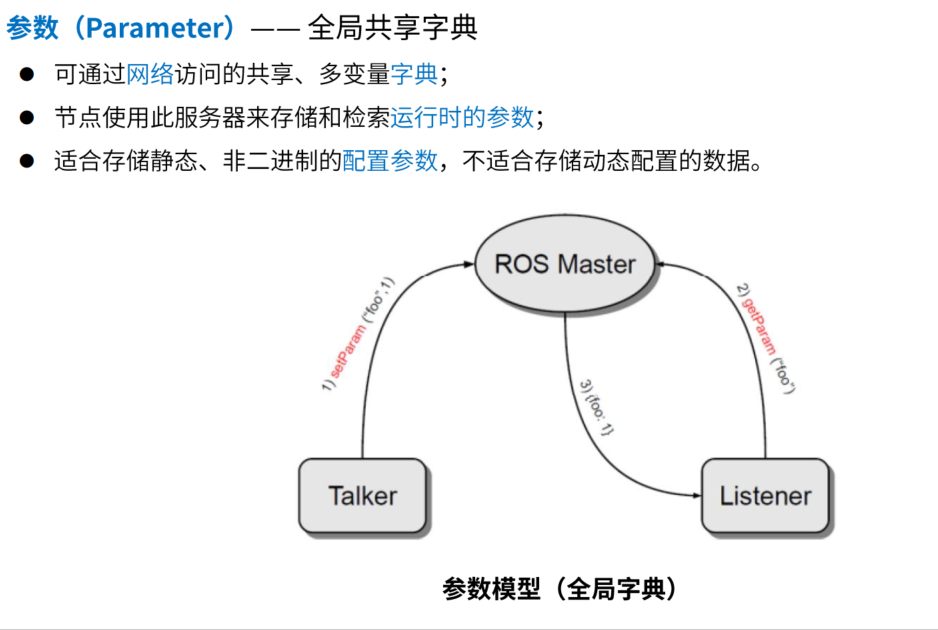
全局参数
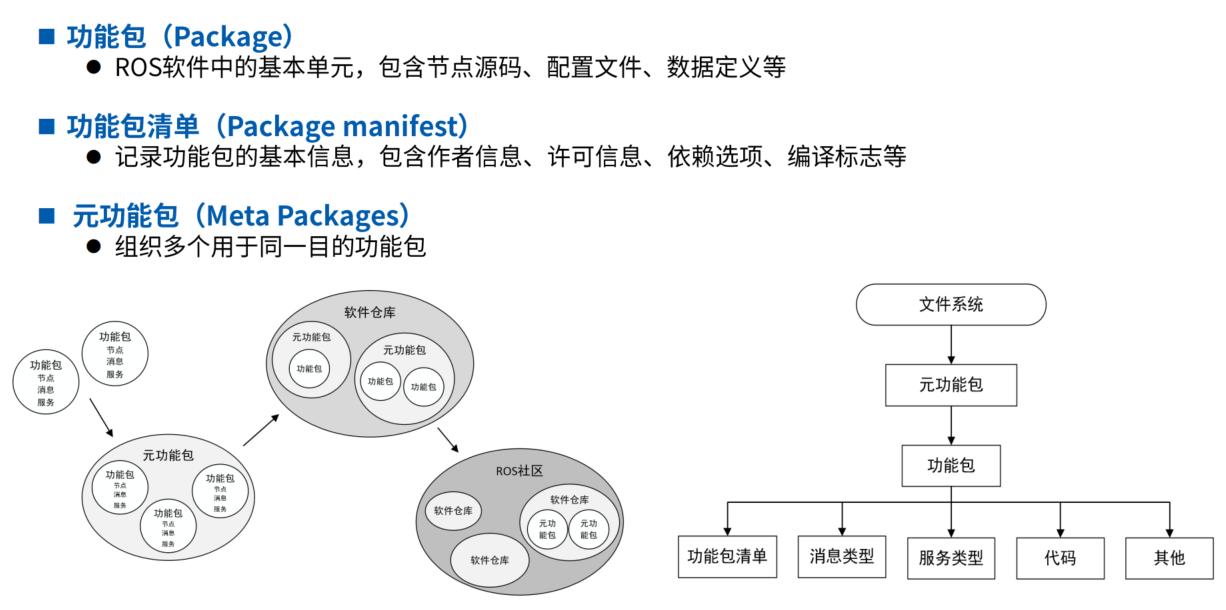
文件系统
ROS中的命令行工具
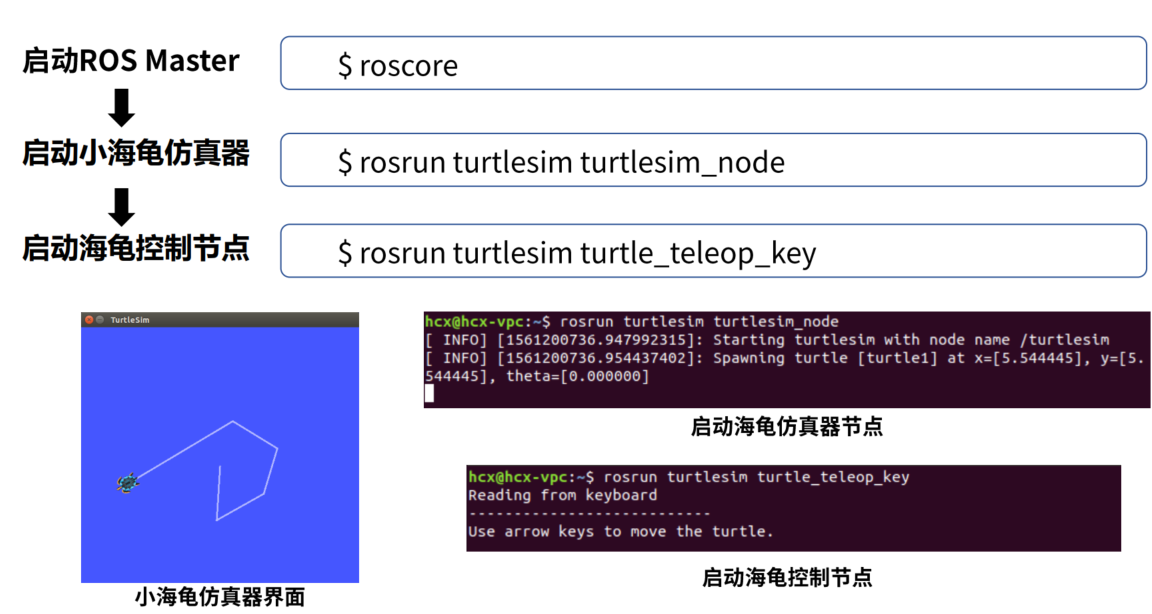
以小海龟为例子
查看话题列表
rosnode list
发布话题消息
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist"linear:
x:1.0
y:0.0
z:0.0
angular:
x:0.0
y:0.0
z:0.0"
发布服务请求
rosservice call /spawn "x:5.0"
y:5.0
theta:0.0
name:'turtle2'"















 509
509











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











