






作者 | 白强伟
整理 | 极市平台
https://zhuanlan.zhihu.com/p/617087561
大家好,这里是 NewBeeNLP。今天分享大模型训练实操知识点,流水线性并行、张量并行、3D并行三种分布式训练方法的详细解读,从原理到具体方法案例。
流水线性并行和张量并行都是对模型本身进行划分,目的是利用有限的单卡显存训练更大的模型。简单来说,流水线并行水平划分模型,即按照层对模型进行划分;张量并行则是垂直划分模型。3D并行则是将流行线并行、张量并行和数据并行同时应用到模型训练中。
一、流水线并行
流水线并行的目标是训练更大的模型。本小节先介绍符合直觉的朴素层并行方法,并分析其局限性。然后,介绍流水线并行算法GPipe和PipeDream。
1. 朴素层并行
当一个模型大到单个GPU无法训练时,最直接的想法是对模型层进行划分,然后将划分后的部分放置在不同的GPU上。下面以一个4层的序列模型为例,介绍朴素层并行:
将其按层划分至两个GPU上:
GPU1负责计算:intermediate (input)) ;
GPU2负责计算:output (intermediate ;
整个朴素层并行前向传播和后向传播的过程如上图所示。GPU1执行前向传播, 并将激活 (activations)缓存下来。然后将 层的输出intermediate发送给GPU2, GPU2完成前向传播和loss计算后, 开始反向传播。当GPU2完成反向传播后, 会将 的梯度返还给GPU1。GPU1完成最终的反向传播。
根据上面的介绍,可以发现朴素层并行的缺点:
低GPU利用率。在任意时刻,有且仅有一个GPU在工作,其他GPU都是空闲的。
计算和通信没有重叠。在发送前向传播的中间结果(FWD)或者反向传播的中间结果(BWD)时,GPU也是空闲的。
高显存占用。GPU1需要保存整个minibatch的所有激活,直至最后完成参数更新。如果batch size很大,这将对显存带来巨大的挑战。
2. GPipe
2.1 GPipe的原理
GPipe通过将minibatch划分为更小且相等尺寸的microbatch来提高效率。具体来说,让每个microbatch独立的计算前后向传播,然后将每个mircobatch的梯度相加,就能得到整个batch的梯度。由于每个层仅在一个GPU上,对mircobatch的梯度求和仅需要在本地进行即可,不需要通信。
假设有4个GPU,并将模型按层划分为4个部分。朴素层并行的过程为
| Timestep | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|---|
| GPU3 | FWD | BWD | ||||||
| GPU2 | FWD | BWD | ||||||
| GPU1 | FWD | BWD | ||||||
| GPU0 | FWD | BWD |
可以看到,在某一时刻仅有1个GPU工作。并且每个timesep花费的时间也比较长,因为GPU需要跑完整个minibatch的前向传播。
GPipe将minibatch划分为4个microbatch,然后依次送入GPU0。GPU0前向传播后,再将结果送入GPU1,以此类推。整个过程如下表
| Timestep | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GPU3 | F1 | F2 | F3 | F4 | B4 | B3 | B2 | B1 | ||||||
| GPU2 | F1 | F2 | F3 | F4 | B4 | B3 | B2 | B1 | ||||||
| GPU1 | F1 | F2 | F3 | F4 | B4 | B3 | B2 | B1 | ||||||
| GPU0 | F1 | F2 | F3 | F4 | B4 | B3 | B2 | B1 |
F1表示使用当前GPU上的层来对microbatch1进行前向传播。在GPipe的调度中,每个timestep上花费的时间要比朴素层并行更短,因为每个GPU仅需要处理microbatch。
2.2 GPipe的Bubbles问题
bubbles指的是流水线中没有进行任何有效工作的点。这是由于操作之间的依赖导致的。例如,在GPU3执行完F1之前,GPU4只能等待。整个流水线过程中的bubbles如下图所示。
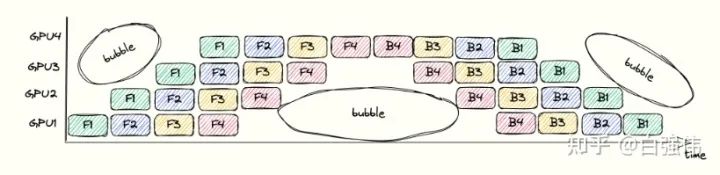
bubbles浪费时间的比例依赖于pipeline的深度 和mincrobatch的数量 。假设单个GPU上完成前向传播或者后向传播的面积为 1 (也就是上图中的单个小方块面积为 1 )。上图中的总长度为 , 宽度为 , 总面积为 。其中, 彩色小方块占用的面积表示GPU执行的时间, 为其 。空白处面积的占比代表了浪费时间的比较, 其值为
因此,增大microbatch的数量m,可以降低bubbles的比例。
2.3 GPipe的显存需求
增大batch size就会线性增大需要被缓存激活的显存需求。在GPipe中,GPU需要在前向传播至反向传播这段时间内缓存激活(activations)。以GPU0为例,microbatch1的激活需要从timestep 0保存至timestep 13。
GPipe为了解决显存的问题,使用了gradient checkpointing。该技术不需要缓存所有的激活,而是在反向传播的过程中重新计算激活。这降低了对显存的需求,但是增加了计算代价。
假设所有层都大致相等。每个GPU缓存激活所需要的显存为
总层数数量
也就是与单个GPU上的层数以及batch size成正比。相反,使用gradient checkpointing仅需要缓存边界层(需要跨GPU发送结果的层)的输入。这可以降低每个GPU的显存峰值需求
总层数数量
(batchsize) 是缓存边界激活所需要的显存。当对给定的microbatch执行反向传播时, 需要重新计算该microbatch梯度所需要的激活。对于每个GPU上的 总层数数量 层需要 的显存空间。
3. PipeDream
GPipe需要等所有的microbatch前向传播完成后,才会开始反向传播。PipeDream则是当一个microbatch的前向传播完成后,立即进入反向传播阶段。 理论上,反向传播完成后就可以丢弃掉对应microbatch缓存的激活。由于PipeDream的反向传播完成的要比GPipe早,因此也会减少显存的需求。
下图是PipeDream的调度图,4个GPU和8个microbatchs。蓝色的方块表示前向传播,绿色表示反向传播,数字则是microbatch的id。
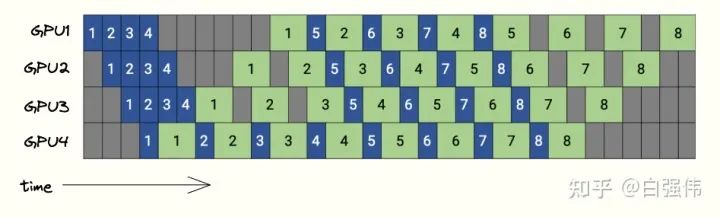
PipeDream在bubbles上与GPipe没有区别,但是由于PipeDream释放显存的时间更早,因此会降低对显存的需求。
4. 合并数据并行和流水线并行
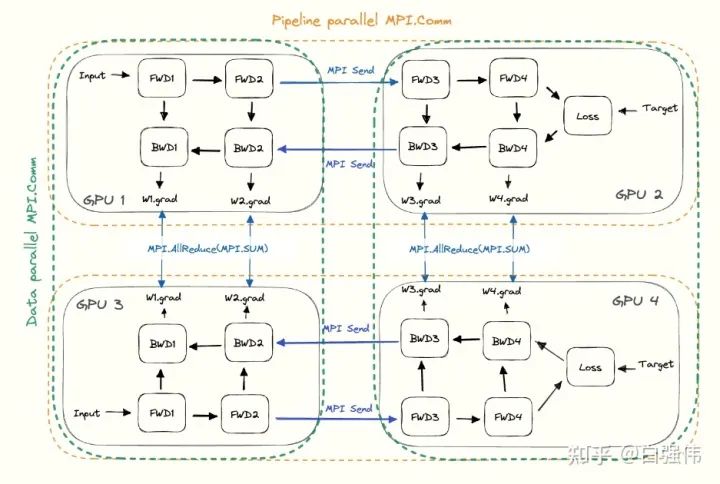
数据并行和流水线并行是正交的,可以同时使用。
对于流水线并行。每个GPU需要与下个流水线阶段(前向传播)或者上个流水线阶段(反向传播)进行通信。
对于数据并行。每个GPU需要与分配了相同层的GPU进行通信。所有层的副本需要AllReduce对梯度进行平均。
这将在所有GPU上形成子组,并在子组中使用集合通信。任意给定的GPU都会有两部分的通信,一个是包含所有相同层的GPU(数据并行),另一个与不同层的GPU(流水线并行)。下图是流水线并行度为2且数据并行度为2的示例图,水平方向是完整的一个模型,垂直方向是相同层的不同副本。
二、张量并行
Transformer中的主要部件是全连接层和注意力机制,其核心都是矩阵乘法。张量并行的核心就是将矩阵乘法进行拆分,从而降低模型对单卡的显存需求。
1. 1D张量并行
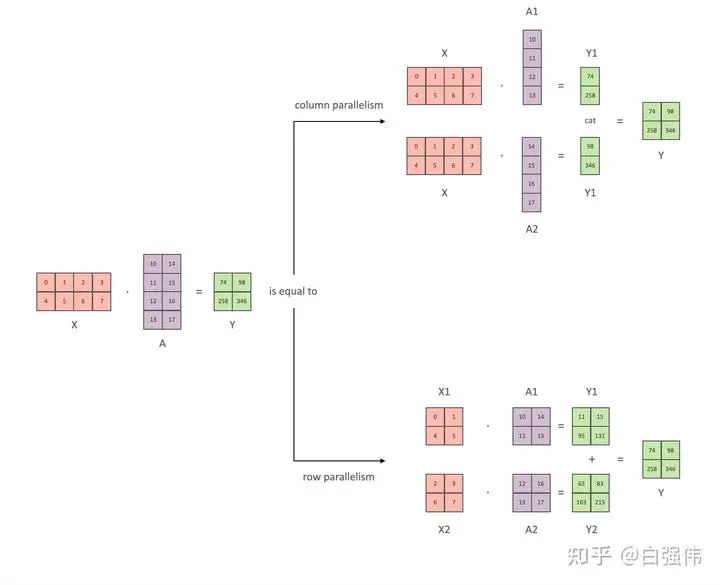
本小节以全链接层 为例, 介绍张量并行。其中, 和 是输入和输出向量, 是权重矩阵, 是非线性激活函数。总量来说张量并行可以分为列并行和行并行(以权重矩阵的分割方式命名), 上图展示了两种并行。
(1) 矩阵乘法角度
这里以矩阵乘法的方式辅助理解1D张量并行。
列并行
将矩阵行列划分为n份(不一定必须相等大小)可以表示为 ,那么矩阵乘 法表示为
显然,仅需要对权重进行划分。
行并行
对权重进行划分,那么必须对输入矩阵也进行划分。假设要将A水平划分为n份,则输入矩阵X必须垂直划分为n份,那么矩阵乘法表示为
(2) 激活函数与通信
显然,只观察上面的数据公式,无论是行并行还是列并行 ,都只需要在各个部分计算完后进行一次通常。只不过列并行将通信的结果进行拼接,而行并行则是对通信结果相加。
现在,我们将非线性激活GeLU加上,并模拟两层的全链接层。设X是输入,A和B则是两个全链接层的权重。
列并行
通过上面的公式可以看到。当我们将A和B提前划分好后,就可以独立进行计算,在计算出后再进行通信。也就是说,这个例子中虽然有两个全链接层,但是仅需要在得到最终结果前进行通信即可。
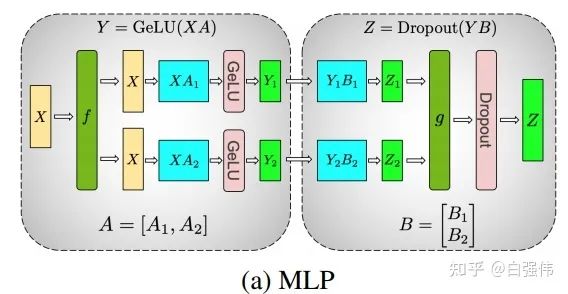
所以,多个全链接层堆叠时,仅需要在最终输出时进行一次通信即可(如上图所示) 。
行并行
由于 是非线性的,所以
因此,行并行每一个全链接层都需要进行通信来聚合最终的结果。
(3) 多头注意力并行
多头注意力并行不是1D张量并行,但是由于其是Megatron-LM中与1D张量并行同时提出的,所以这里也进行简单的介绍。
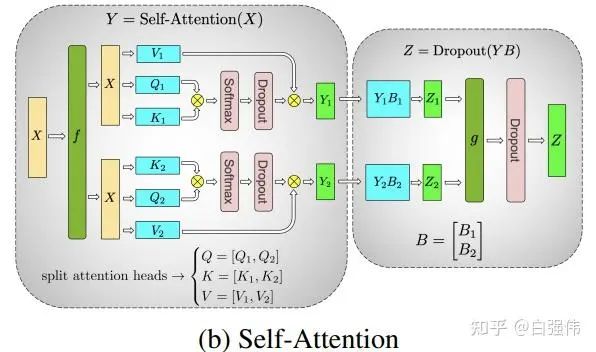
由于多头注意力的各个头之间本质上就是独立的,因此各个头完全可以并行运算。
注意:张量并行(TP)需要非常快的网络,因此不建议跨多个节点进行张量并行。实际中,若一个节点有4个GPU,最高的张量并行度为4。
2. 2D、2.5D张量并行
在1D张量并行后,又逐步提出了2D、2.5D和3D张量并行。这里对2D和2.5D张量并行进行简单介绍:
(1) 2D张量并行
1D张量并行并没有对激活(activations,也就是模型中间层的输出结果)进行划分,导致消耗大量的显存。
这里仍然以矩阵乘法 为例, 给定有 个处理器。这里假设 , 则将X和A都划分为 的块。
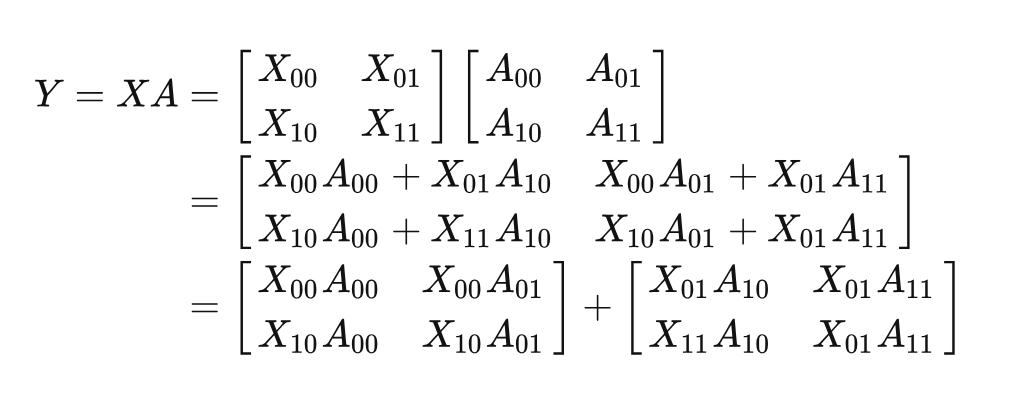
基于上面的矩阵乘法的变化,可以发现Y=XA可以分解为两个矩阵相加。具体来说,两个矩阵的结果仍然需要串行的计算。但是,单个矩阵中的4个子矩阵可以使用 的处理器来并行计算。
当 , 也就是第一步。对
和
进行广播, 所有 的处理器均拥有这 4 个子矩阵。然后分别执行 、、、 。经过这一步后就得到了第一个矩阵的结果。
当 。对
和
进行广播,各个处理器在分别计算。最终得到第二个矩阵的结果。
将两个矩阵的结果相加。
(2) 2.5D张量并行
仍然是矩阵乘法 , 并假设有 个处理器, 将 X划分为 行和 列。不妨设 , 将 和 分别划分为
和
那么有
其中, concat 表示两个矩阵的垂直拼接操作。
基于上面的推导, 可以发现被拼接的两个矩阵天然可以并行计算。即 和 可以并行计算。看到这里, 应该就可以发现这两个矩阵乘法就是上面的2D张量并行适用的形式。所以, 我们总计有 个处理器, 每 个处理器使用2D张量并行来处理对应的矩阵乘法。最后, 将两个2D张量并行的结果进行拼接即可。
三、3D并行
总的来说,3D并行是由数据并行(DP)、张量并行(TP)和流水线并行(PP)组成。前面已经分别介绍了TP和PP,ZeRO-DP是一种显存高效的数据并行策略,原理见文章:
白强伟:【深度学习】【分布式训练】DeepSpeed:AllReduce与ZeRO-DP142
https://zhuanlan.zhihu.com/p/610587671
下面介绍如何将三种并行技术结合在一起,形成3D并行技术。
1. 一个3D并行的例子
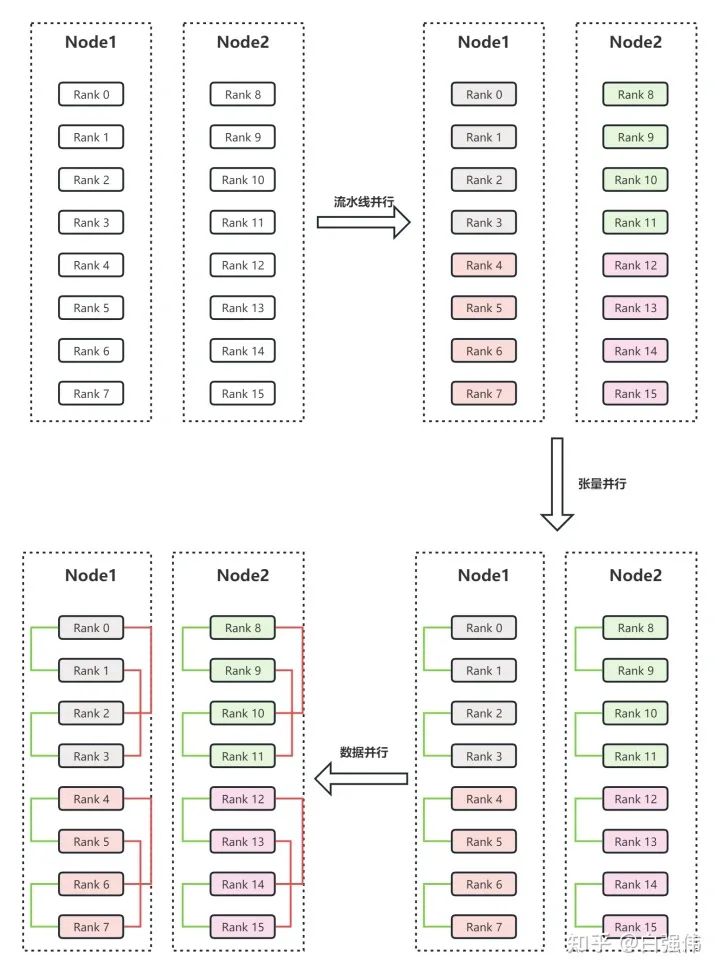
假设有两个节点Node1和Node2,每个节点有8个GPU,共计16个GPU。16个GPU的编号分别为Rank0、Rank1、...、Rank15。此外,假设用户设置流水线并行度为4,张量并行度为2。
流水线并行。流水线并行会将整个模型划分为4份,这里称为sub_model_1至sub_model_4。每连续的4张GPU负责一个sub_model。即上图右上角中,相同颜色的GPU负责相同的sub_model。
张量并行。张量并行会针对流水线并行中的sub_model来进行张量的拆分。即Rank0和Rank1负责一份sub_model_1,Rank2和Rank3负责另一份sub_model_1;Rank4和Rank5负责sub_model_2,Rank6和Rank7负责另一份sub_model_2;以此类推。上图右下角中,绿色线条表示单个张量并行组,每个张量并行组都共同负责某个具体的sub_model。
数据并行。数据并行的目的是要保证并行中的相同模型参数读取相同的数据。经过流水线并行和张量并行后,Rank0和Rank2负责相同的模型参数,所以Rank0和Rank2是同一个数据并行组。上图左上角中的红色线条表示数据并行组。
2. 3D并行分析
为什么3D并行需要按上面的方式划分GPU呢? 首先,模型并行是三种策略中通信开销最大的,所以优先将模型并行组放置在一个节点中,以利用较大的节点内带宽。其次,流水线并行通信量最低,因此在不同节点之间调度流水线,这将不受通信带宽的限制。最后,若张量并行没有跨节点,则数据并行也不需要跨节点;否则数据并行组也需要跨节点。
流水线并行和张量并行减少了单个显卡的显存消耗,提高了显存效率。但是,模型划分的太多会增加通信开销,从而降低计算效率。ZeRO-DP不仅能够通过将优化器状态进行划分来改善显存效率,而且还不会显著的增加通信开销。
一起交流
想和你一起学习进步!『NewBeeNLP』目前已经建立了多个不同方向交流群(机器学习 / 深度学习 / 自然语言处理 / 搜索推荐 / 图网络 / 面试交流 / 等),名额有限,赶紧添加下方微信加入一起讨论交流吧!(注意一定o要备注信息才能通过)

参考资料
https://siboehm.com/articles/22/pipeline-parallel-training
https://arxiv.org/pdf/1811.06965.pdf
https://huggingface.co/docs/transformers/v4.18.0/en/parallelism
https://www.colossalai.org/zh-Hans/docs/features/1D_tensor_parallel
https://www.microsoft.com/en-us/research/blog/deepspeed-extreme-scale-model-training-for-everyone/?utm_source=wechat_session&utm_medium=social&utm_oi=738477582021832704


















 4138
4138

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









