






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
一、概述
随着海洋资源的开发和海洋工程的日益增多,自主水下机器人(AUV)在海洋探测、资源开发、环境监测等领域的作用日益显著。由于水下环境的复杂性和不确定性,如何提高AUV的运动控制性能,使其能够高效、安全地完成任务,成为了当前研究的热点和难点。滑模控制(SMC)作为一种在控制系统中常用的方法,因其对外部扰动和模型不确定性的鲁棒性,被广泛应用于各种类型的机器人控制中,包括AUV。
二、研究内容
本研究旨在设计和实现基于SMC的AUV控制器,以实现对AUV系统的精确控制和鲁棒性能。具体研究内容包括:
- 系统建模:
- 对AUV的动力学和水下环境进行建模,包括考虑AUV的质量、惯性、推进器性能、水下流体动力学等因素,以及水下环境的水流、水深等因素。
- 滑模面设计:
- 设计一个适当的滑模面来实现对AUV系统的控制。滑模面应能够将系统的状态引导到所需的状态轨迹,并且对于外部扰动具有鲁棒性。
- 控制器设计:
- 基于设计的滑模面,开发出滑模控制器。这个控制器通常包括一个滑模面跟踪器和一个滑模面切换器,用于实现系统状态的跟踪和鲁棒控制。
- 仿真与实验:
- 使用Matlab和Simulink等仿真软件进行验证和测试,评估控制器的性能,优化参数并验证控制效果。
- 在实际AUV平台上进行实验,进一步验证控制器的实用性和鲁棒性。
- 性能评估与改进:
- 对控制器的性能进行评估,并进行必要的改进和优化,可能涉及调整滑模面参数、优化控制策略、考虑多变量控制等方面。
三、研究方法
- 系统建模:
- 采用数学模型描述AUV的动力学特性和水下环境,包括AUV的六自由度运动方程、推进器模型、流体动力学模型等。
- 滑模面设计:
- 根据AUV的控制目标和约束条件,设计合适的滑模面,确保系统状态能够沿着预定的轨迹运动,并对外部扰动具有鲁棒性。
- 控制器设计:
- 基于滑模控制理论,设计滑模控制器,包括滑模面跟踪器和滑模面切换器。通过调整控制器参数,实现系统状态的精确跟踪和鲁棒控制。
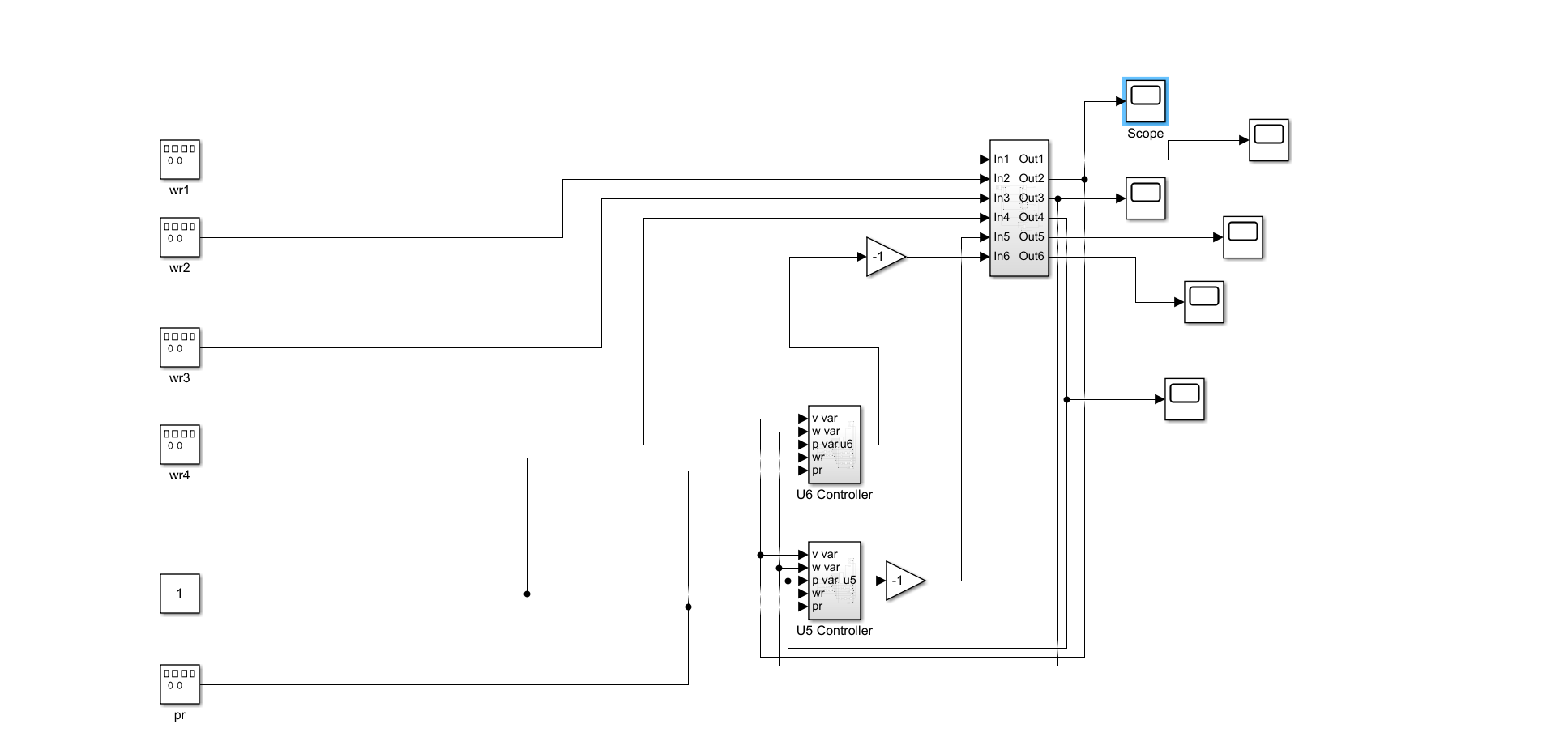
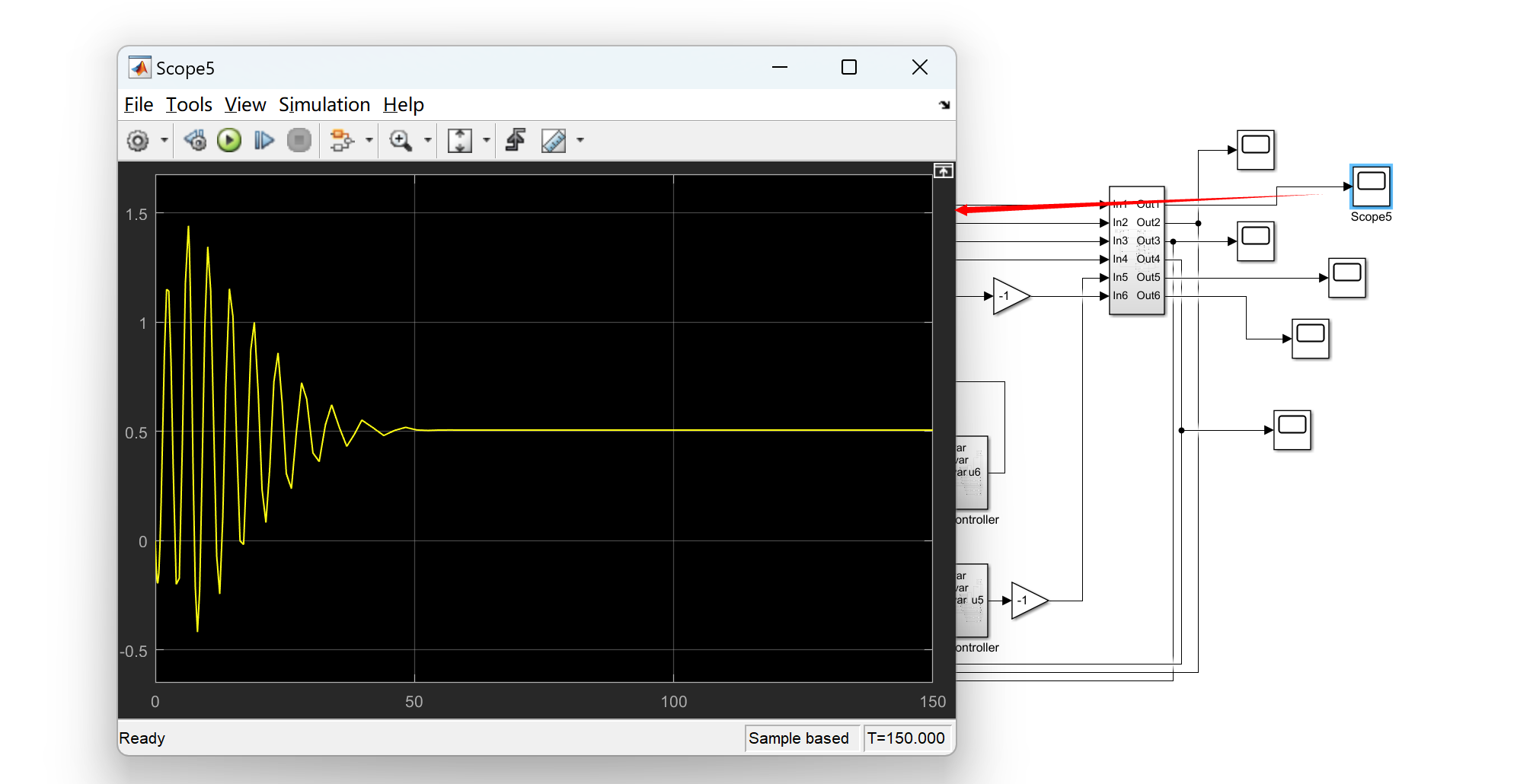
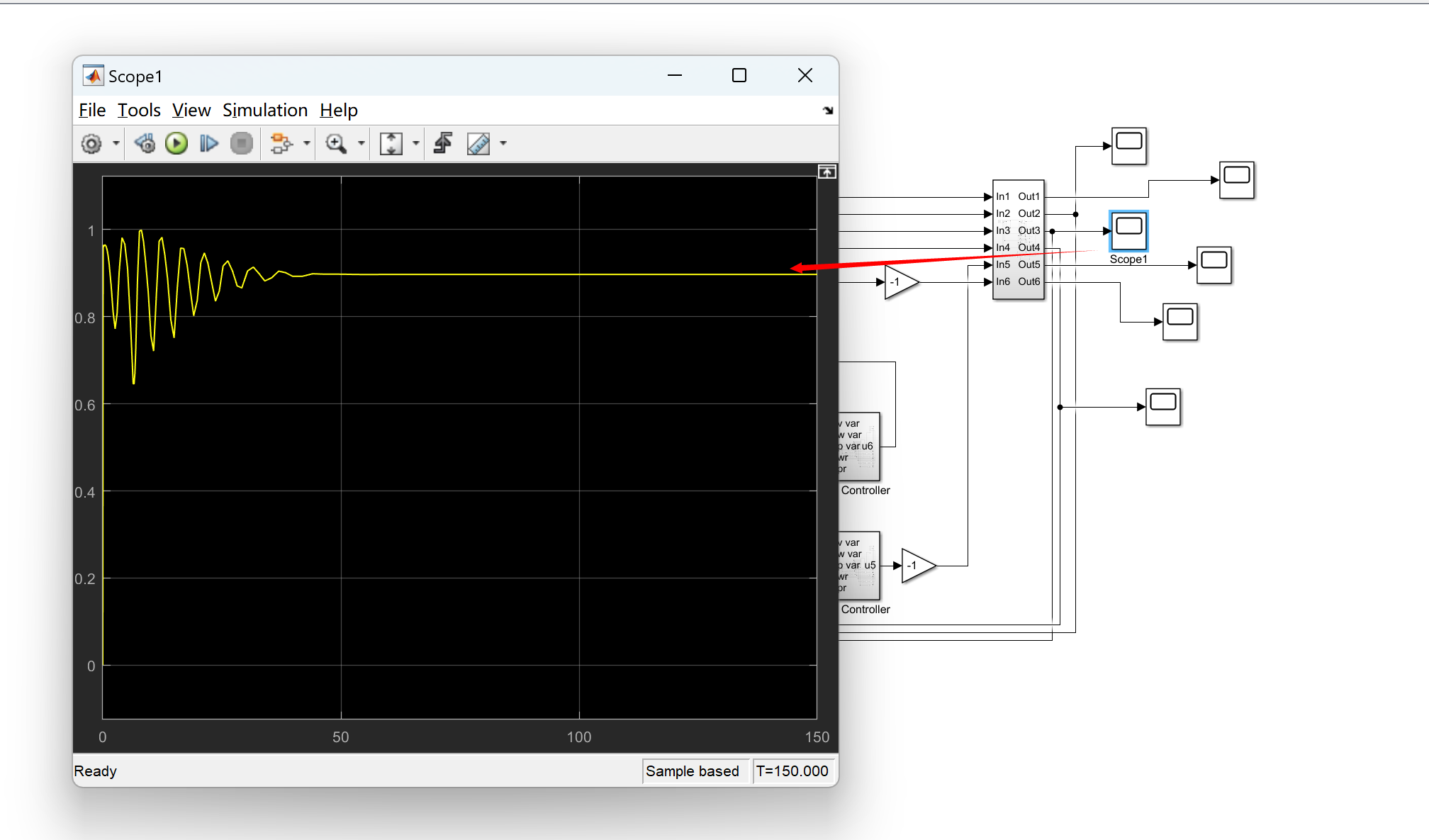
- 仿真与实验:
- 使用Matlab和Simulink进行仿真,通过调整控制器参数和仿真环境,评估控制器的性能。
- 在实际AUV平台上进行实验,验证控制器的实用性和鲁棒性,并根据实验结果进行参数调整和优化。
- 性能评估与改进:
- 通过对比仿真和实验结果,评估控制器的性能。根据评估结果,对控制器进行必要的改进和优化,提高控制器的稳定性和精度。
四、预期成果
- 理论成果:
- 提出基于SMC的AUV控制器设计方法,包括系统建模、滑模面设计、控制器设计等关键步骤。
- 建立AUV的动力学和水下环境数学模型,为控制器的设计和仿真提供理论基础。
- 技术成果:
- 开发基于SMC的AUV控制器,实现对AUV系统的精确控制和鲁棒性能。
- 通过仿真和实验验证控制器的性能,优化控制器参数,提高控制器的稳定性和精度。
- 应用前景:
- 将研究成果应用于AUV的实际控制中,提高AUV在复杂水下环境中的运动控制性能。
- 推动AUV在海洋探测、资源开发、环境监测等领域的应用和发展。
五、结论
本研究通过设计和实现基于SMC的AUV控制器,为AUV的精确控制和鲁棒性能提供了有效的解决方案。通过仿真和实验验证,证明了控制器的稳定性和精度。未来,将进一步优化控制器参数和控制策略,提高控制器的性能和应用范围。
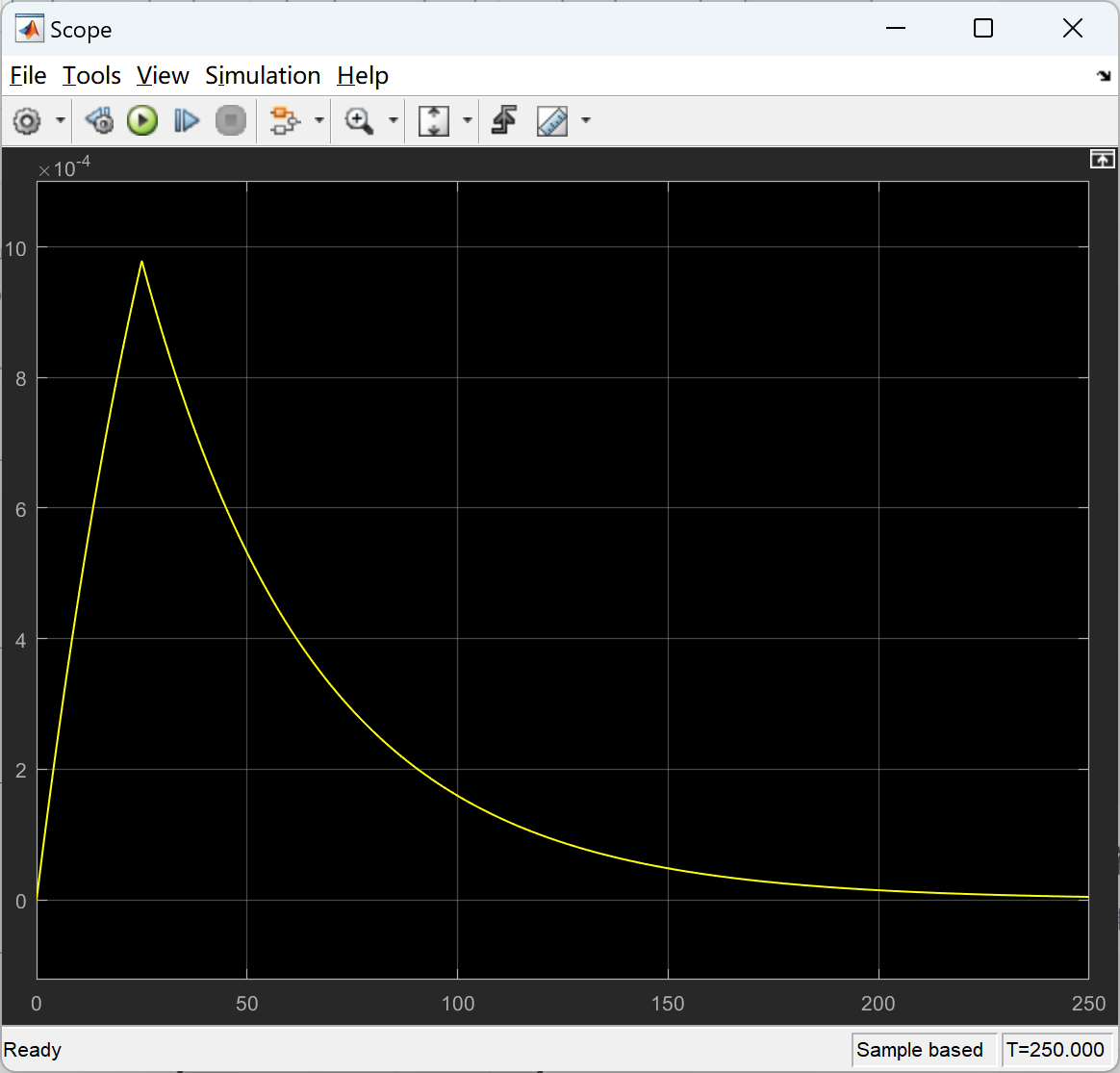
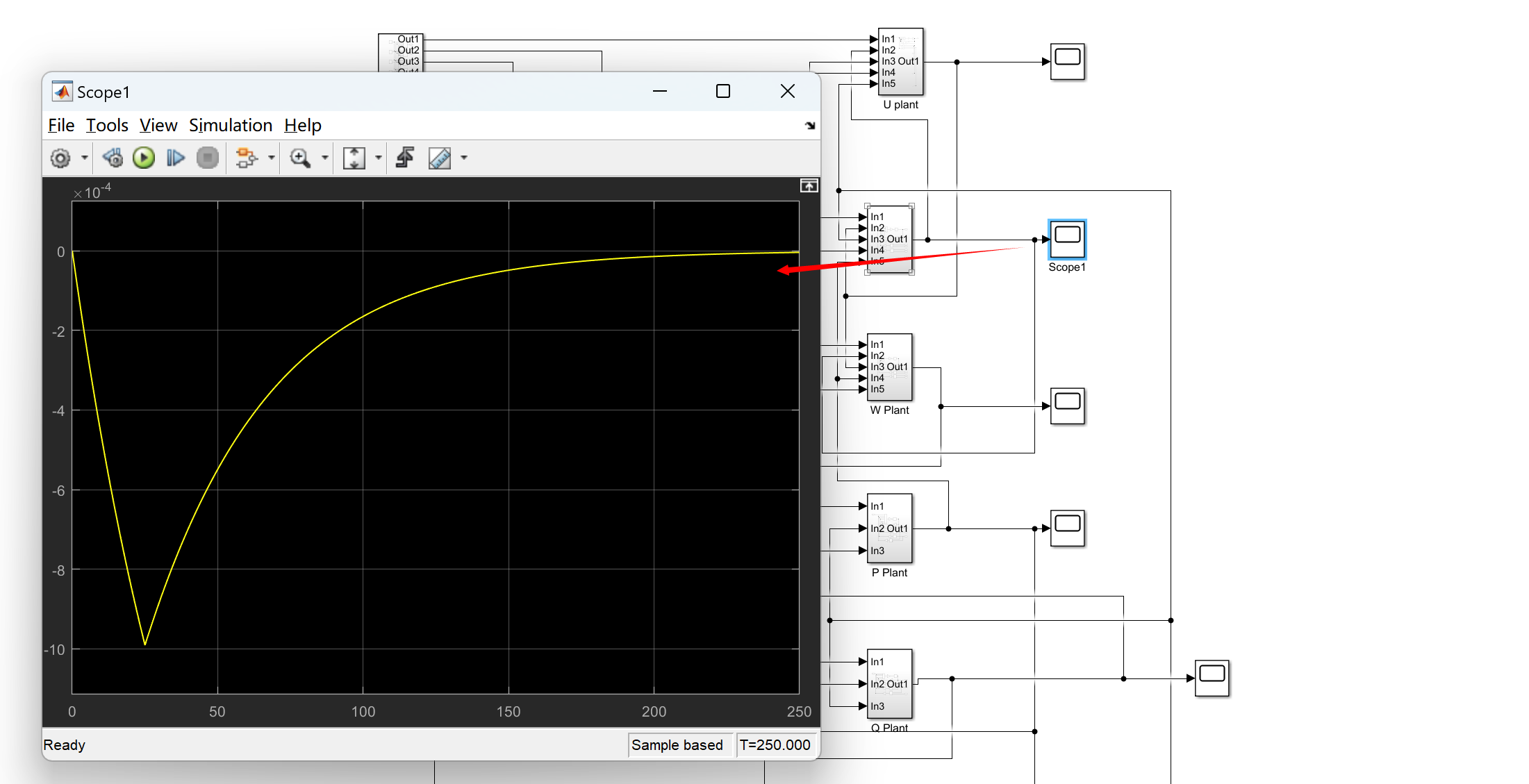
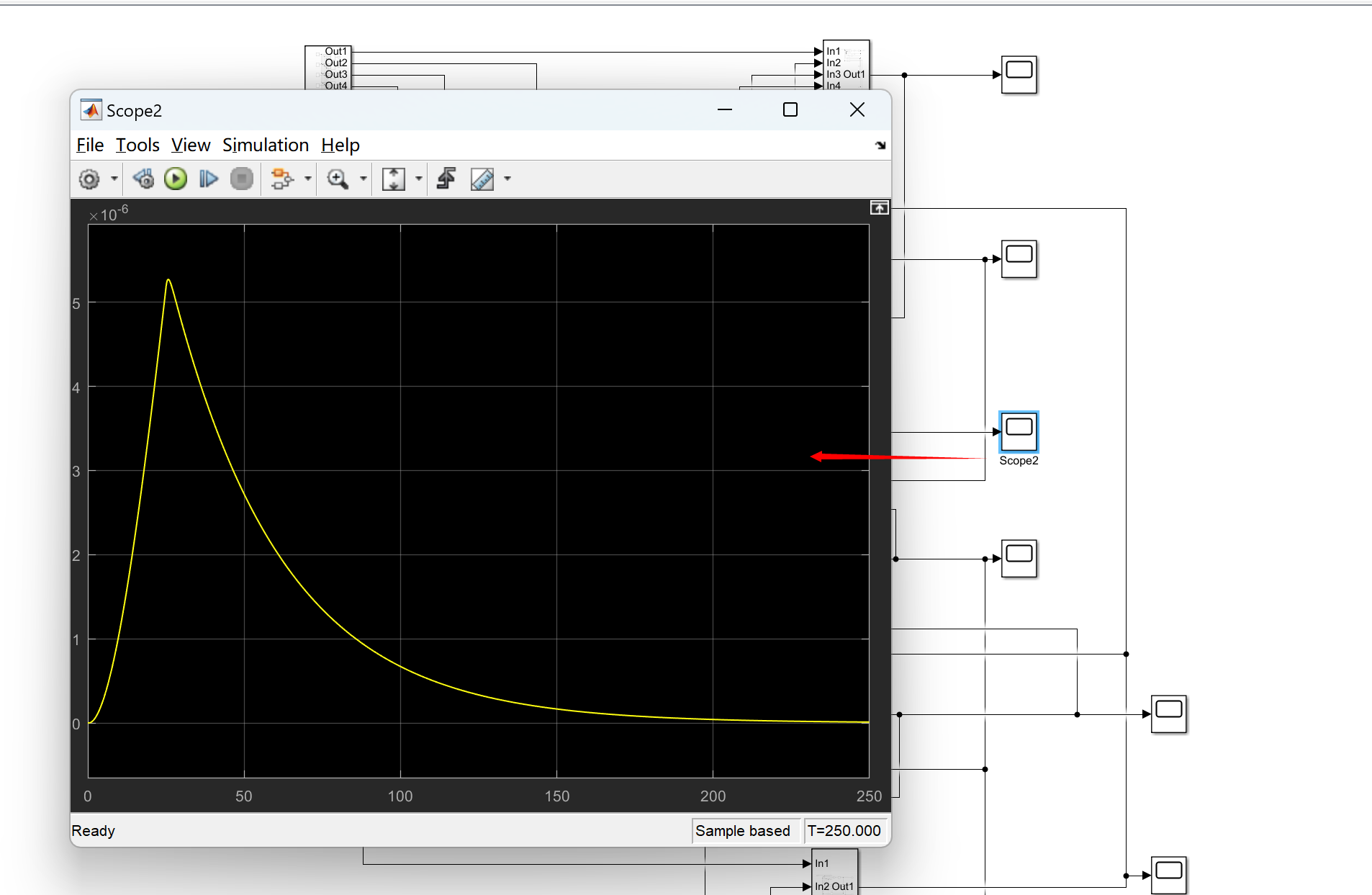
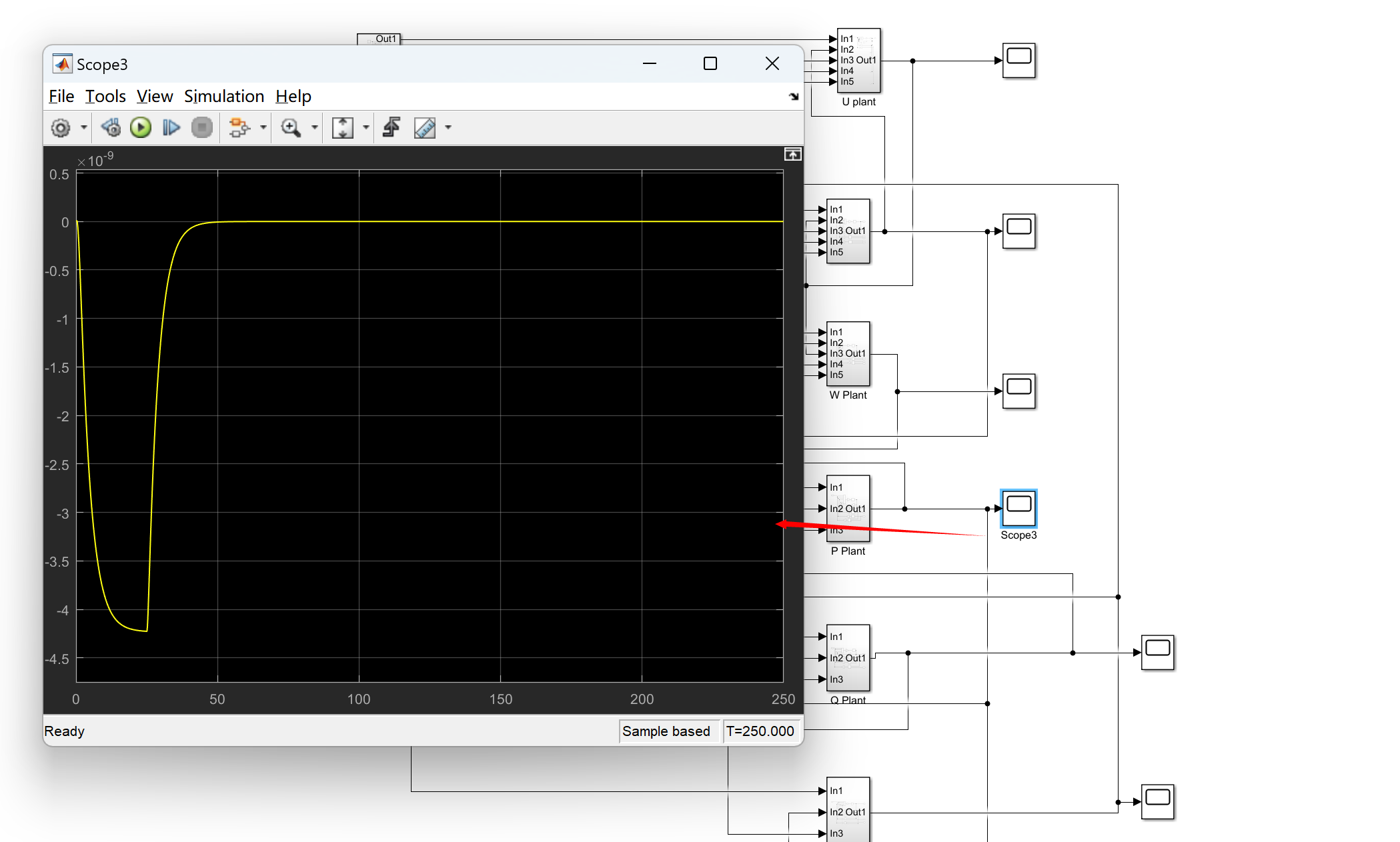
📚2 运行结果
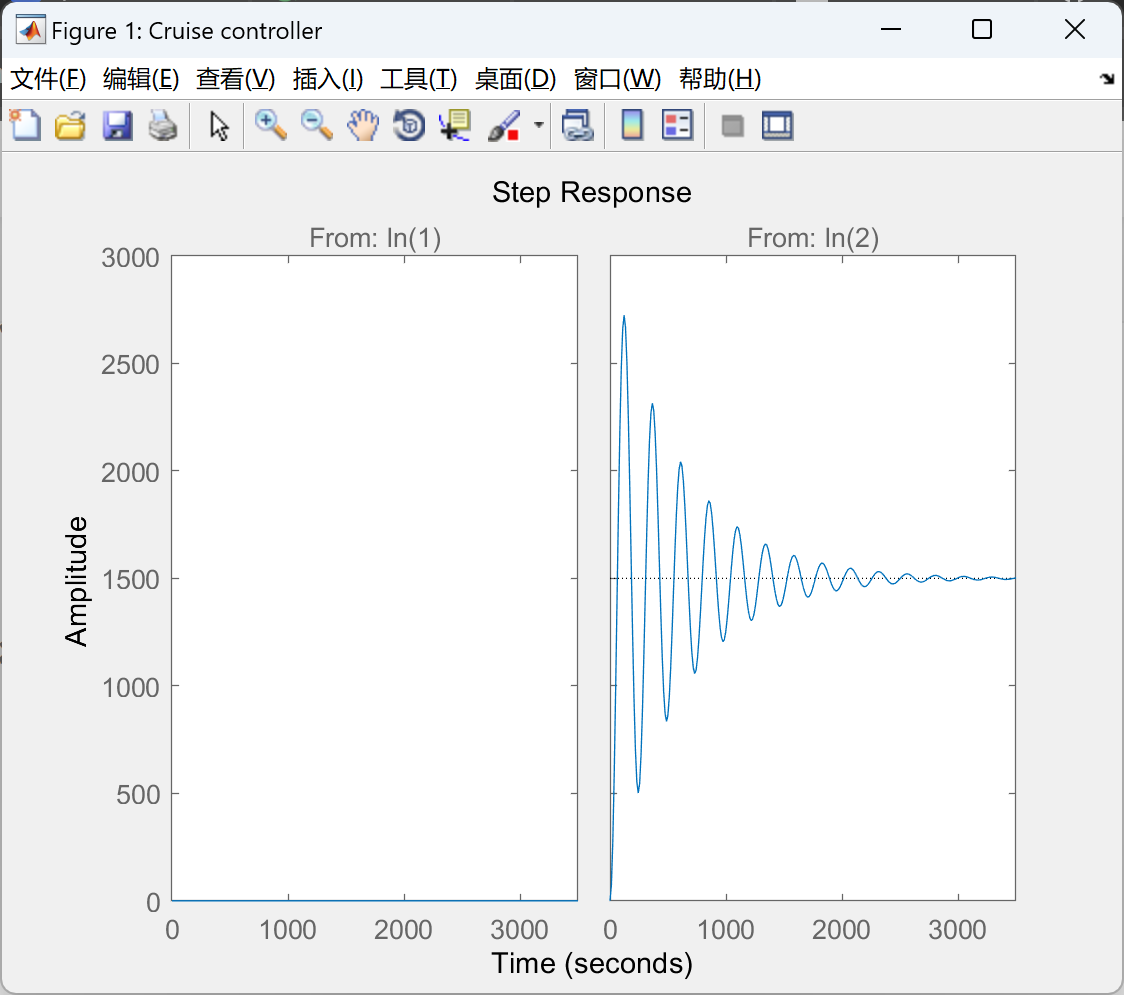
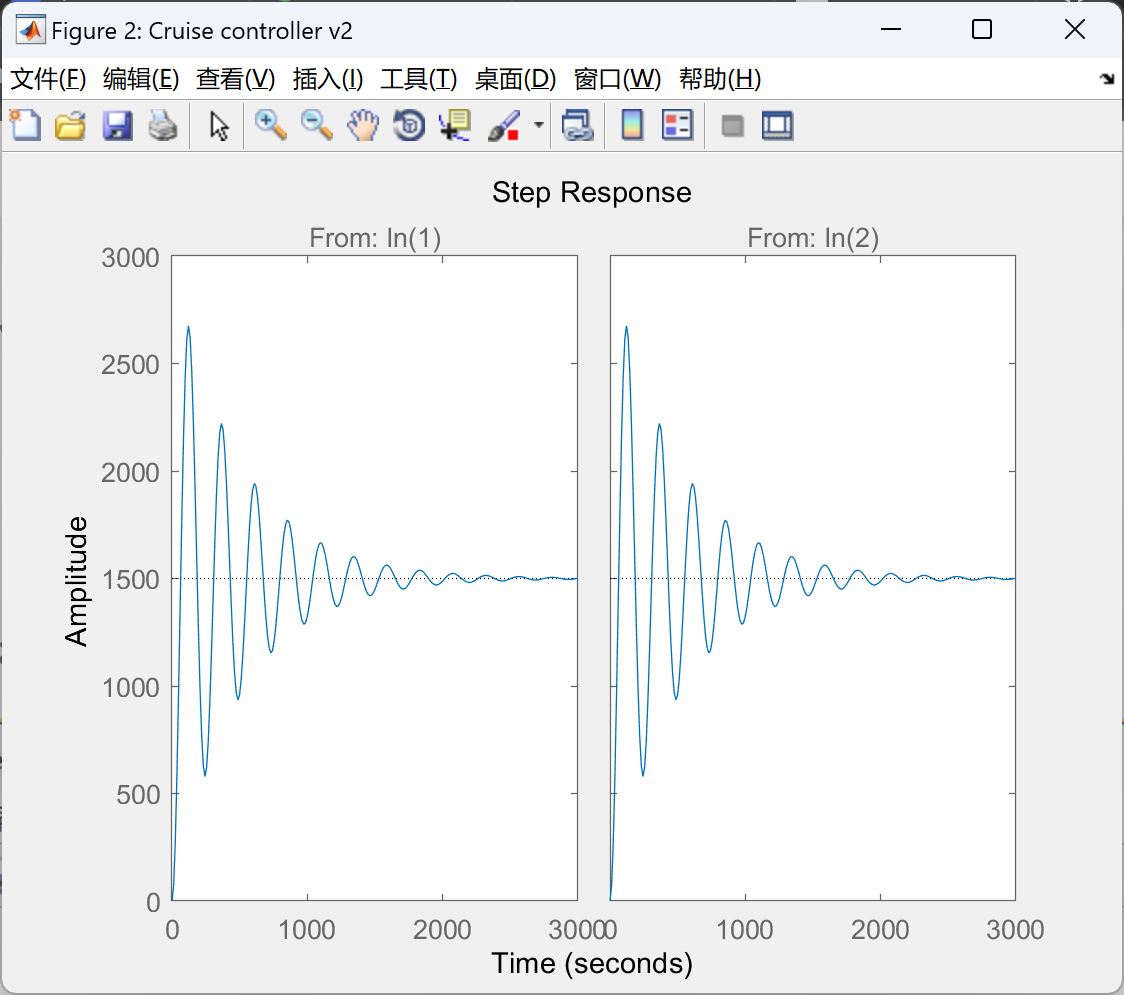
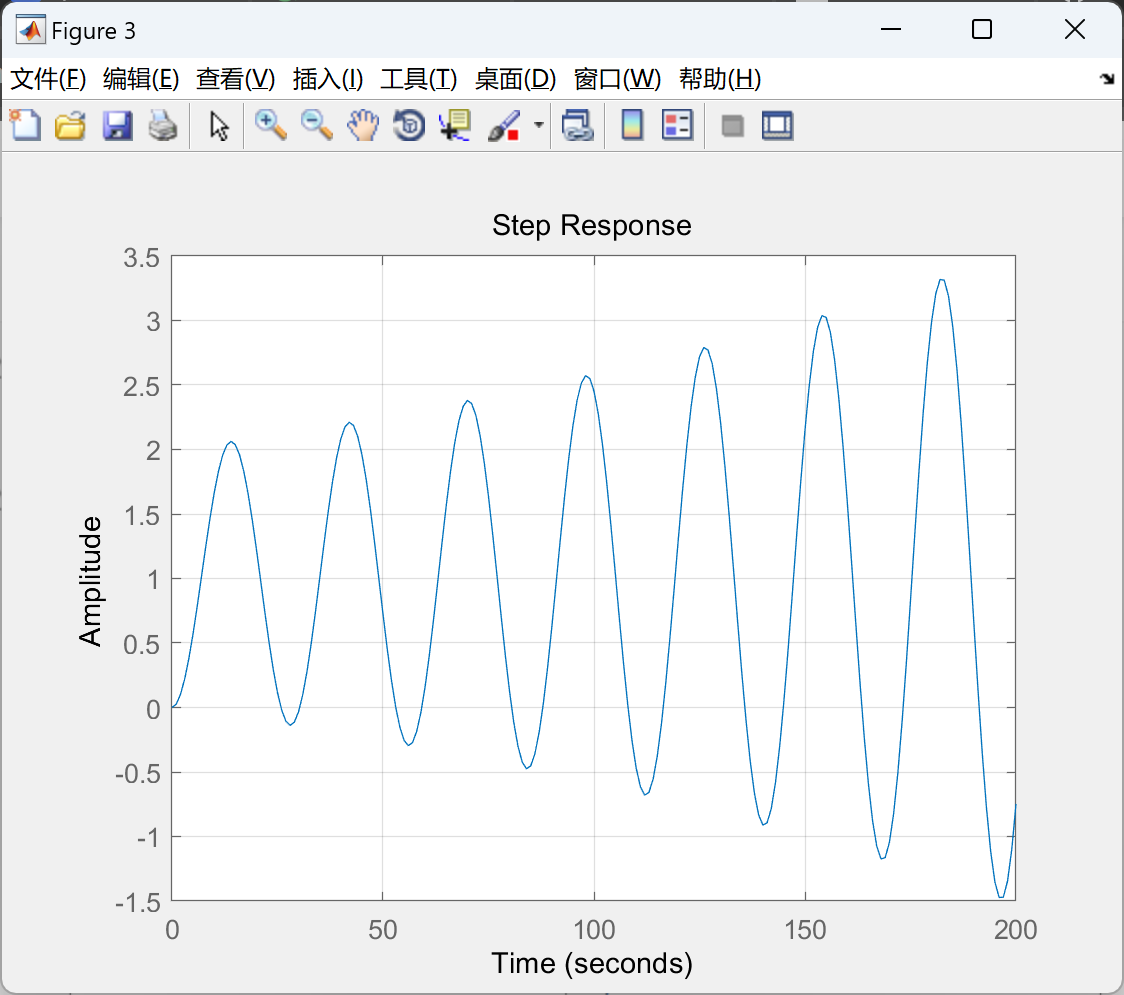
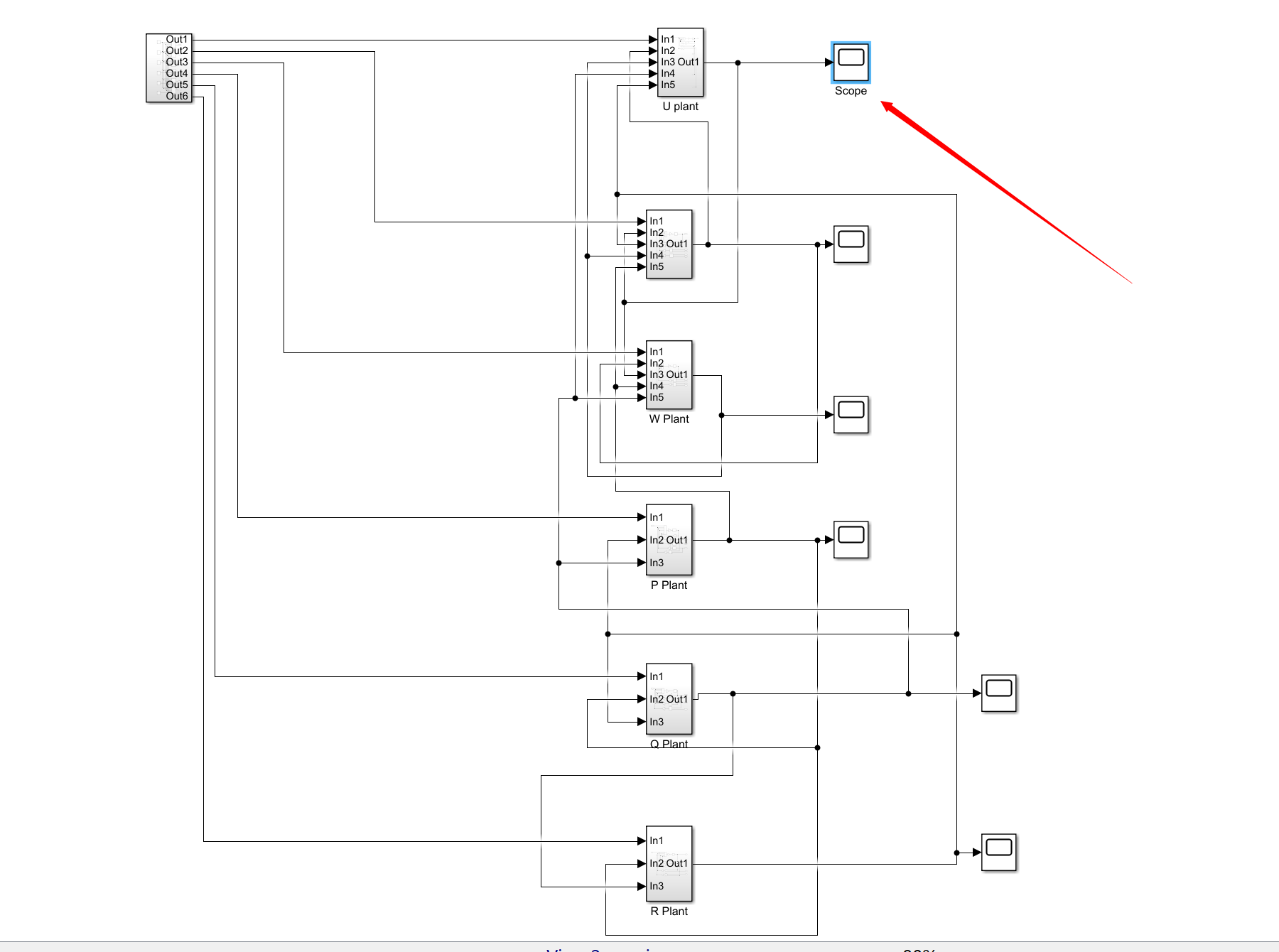
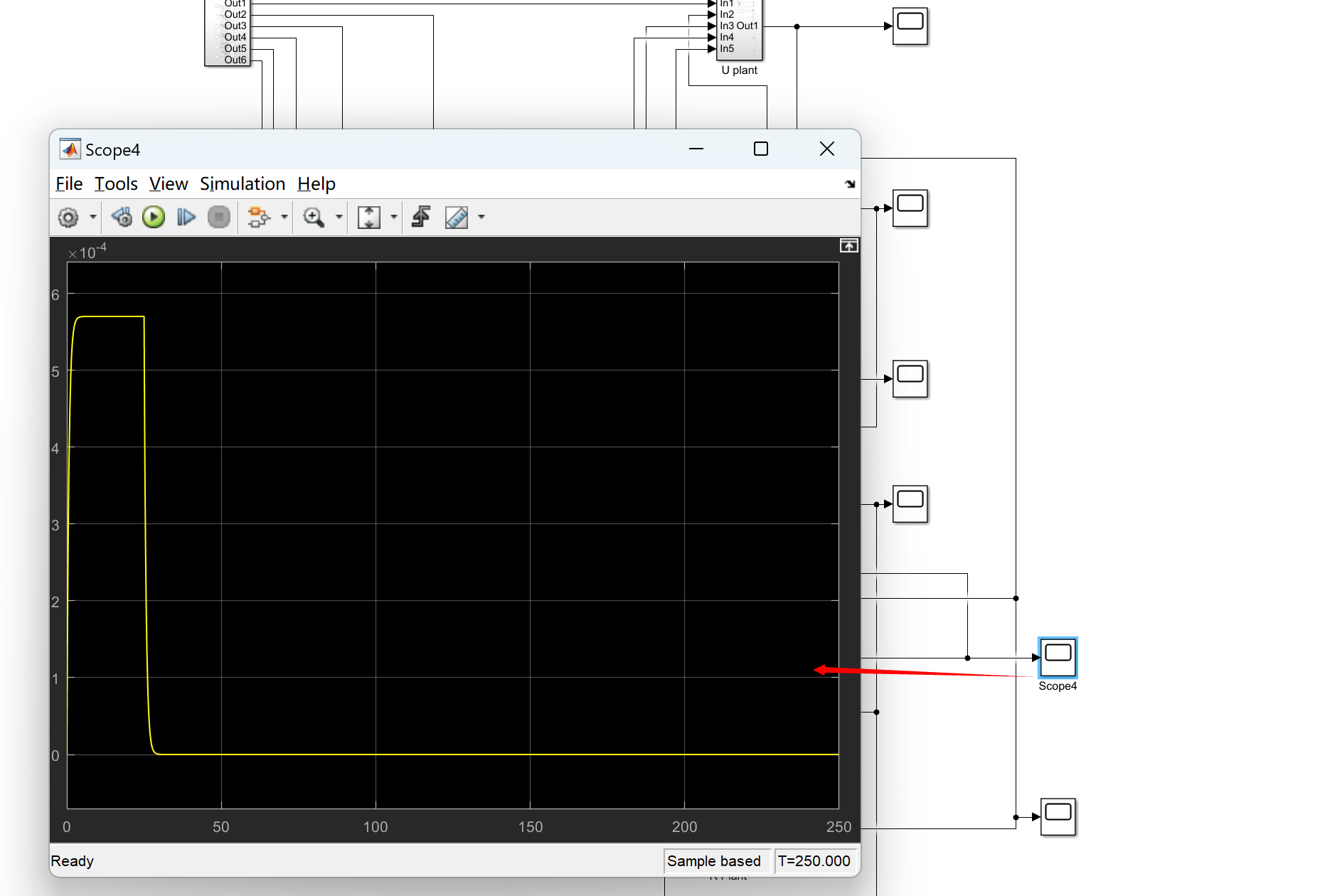
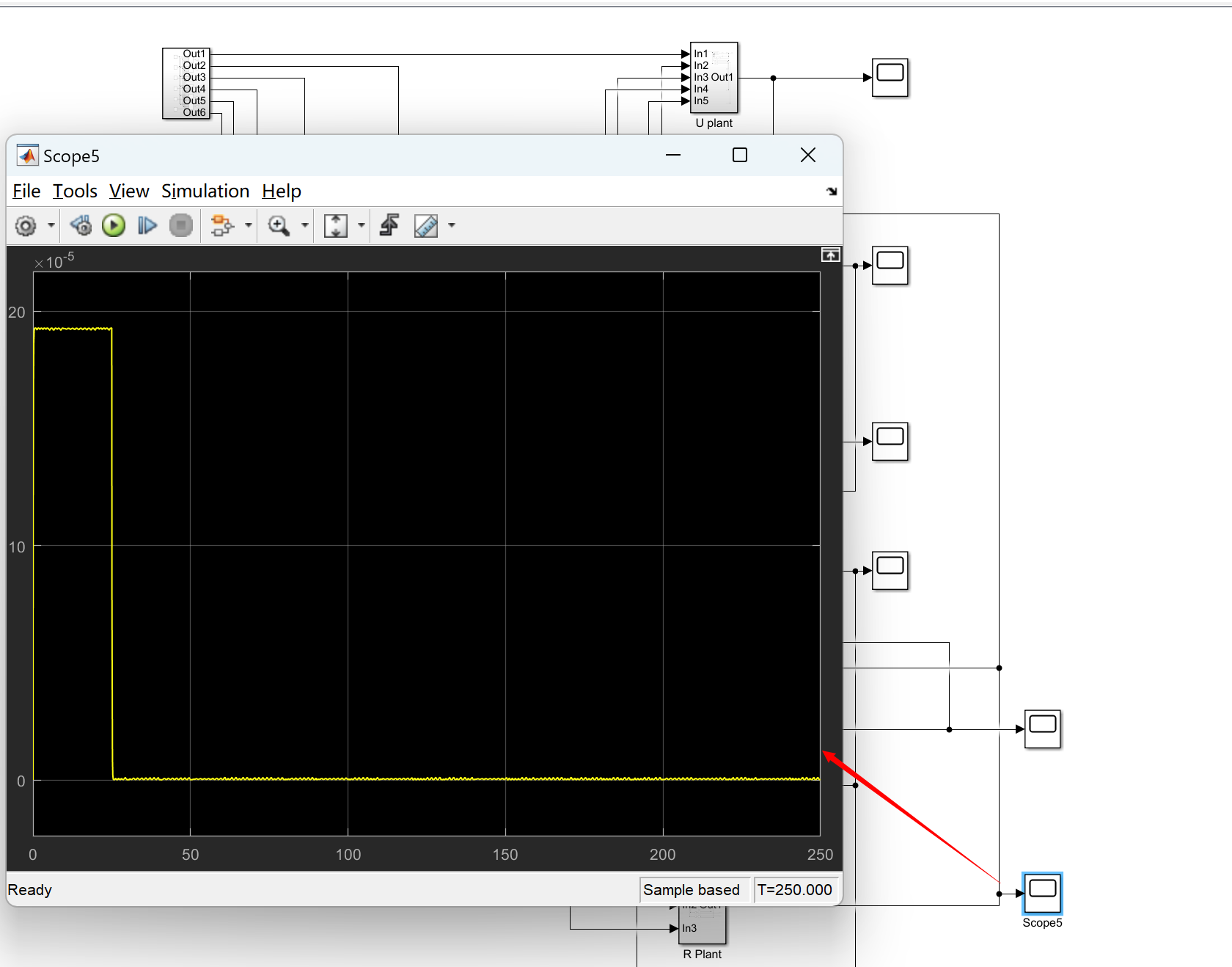
部分代码:
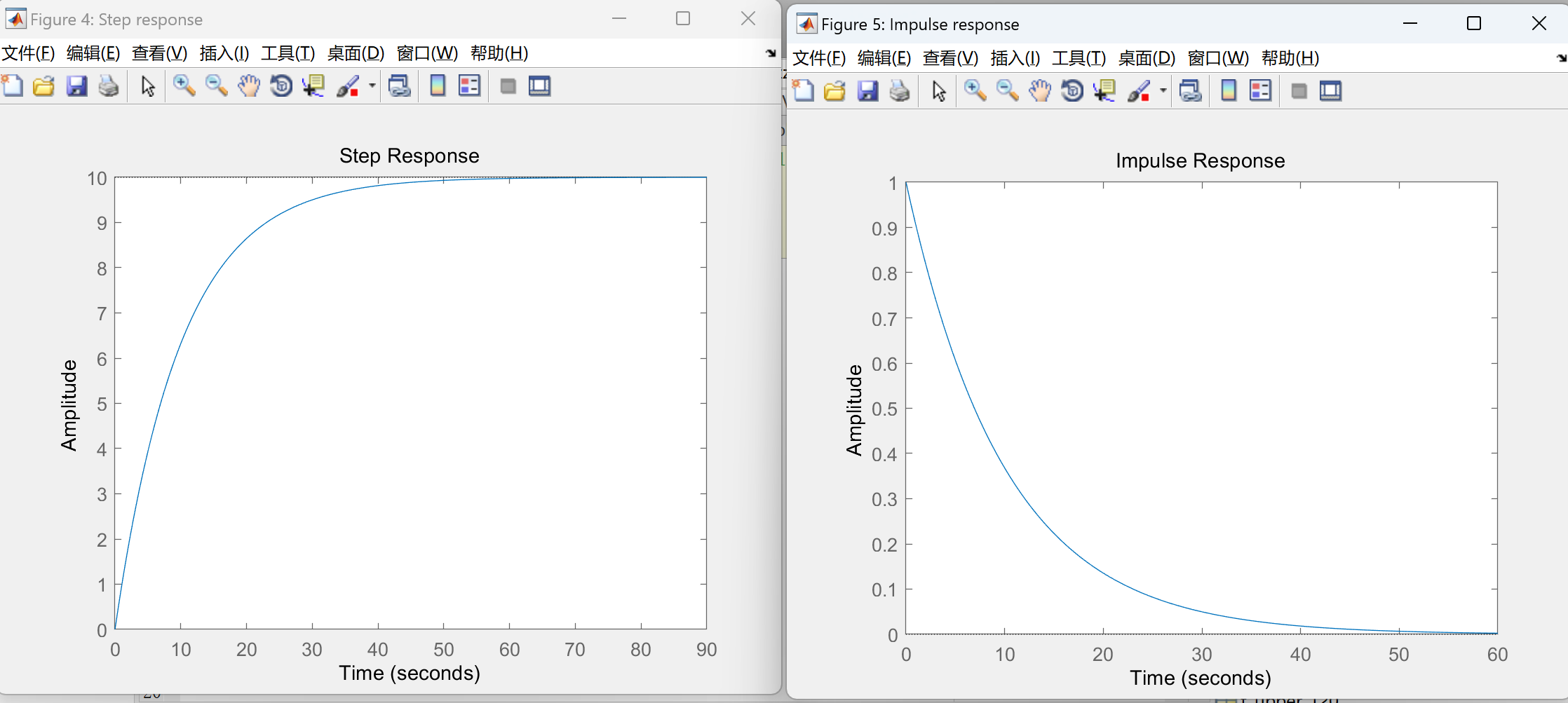
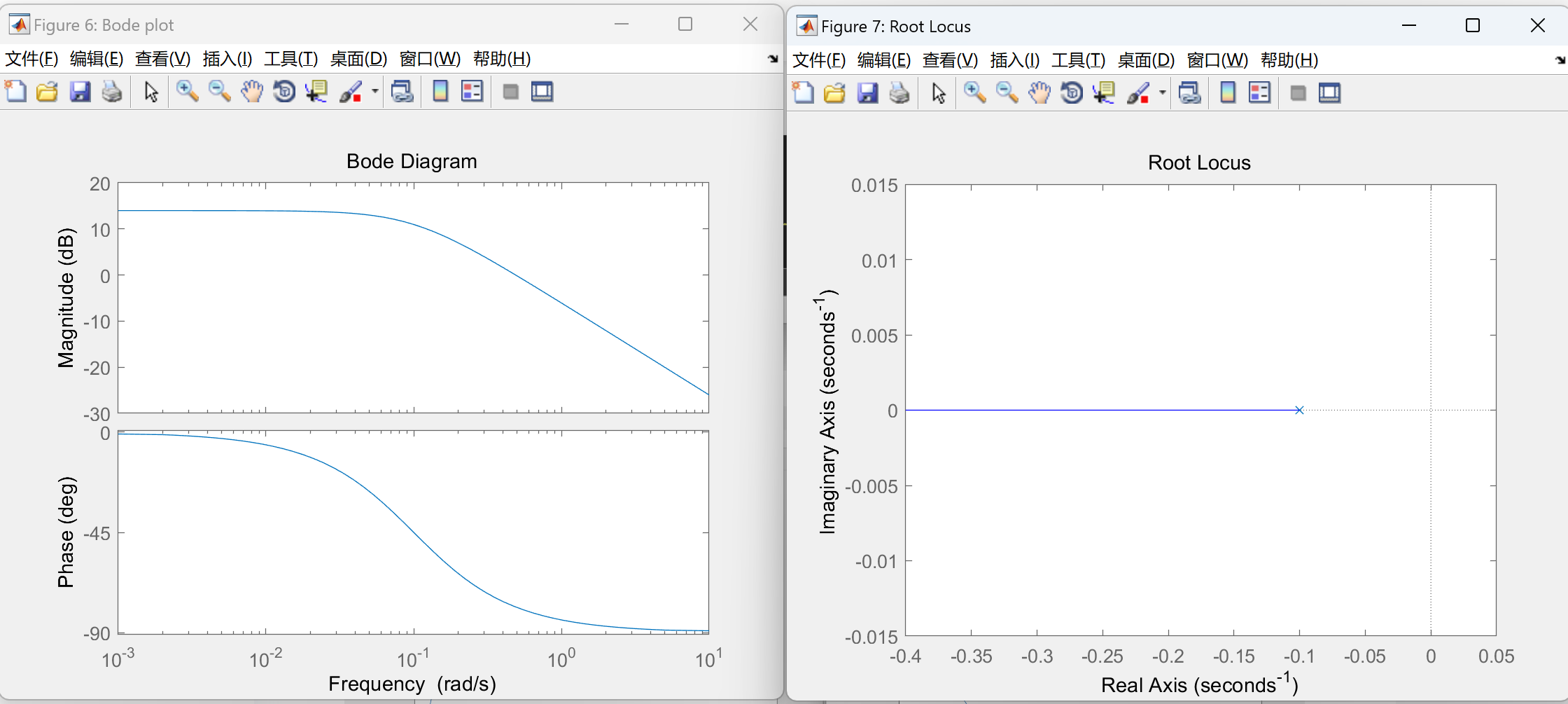
%% #1. Analysis of First order system
k = 5;
tc = 10;
u = 2;
s = tf('s');
G = k/(tc*s+1);
sys = u * G;
figure('Name','Step response')
step(sys);%step response
figure('Name','Impulse response')
impulse(sys);%impulse response
figure('Name','Bode plot')
bode(G);%Bode plot
figure('Name','Root Locus')
rlocus(sys)%root locus
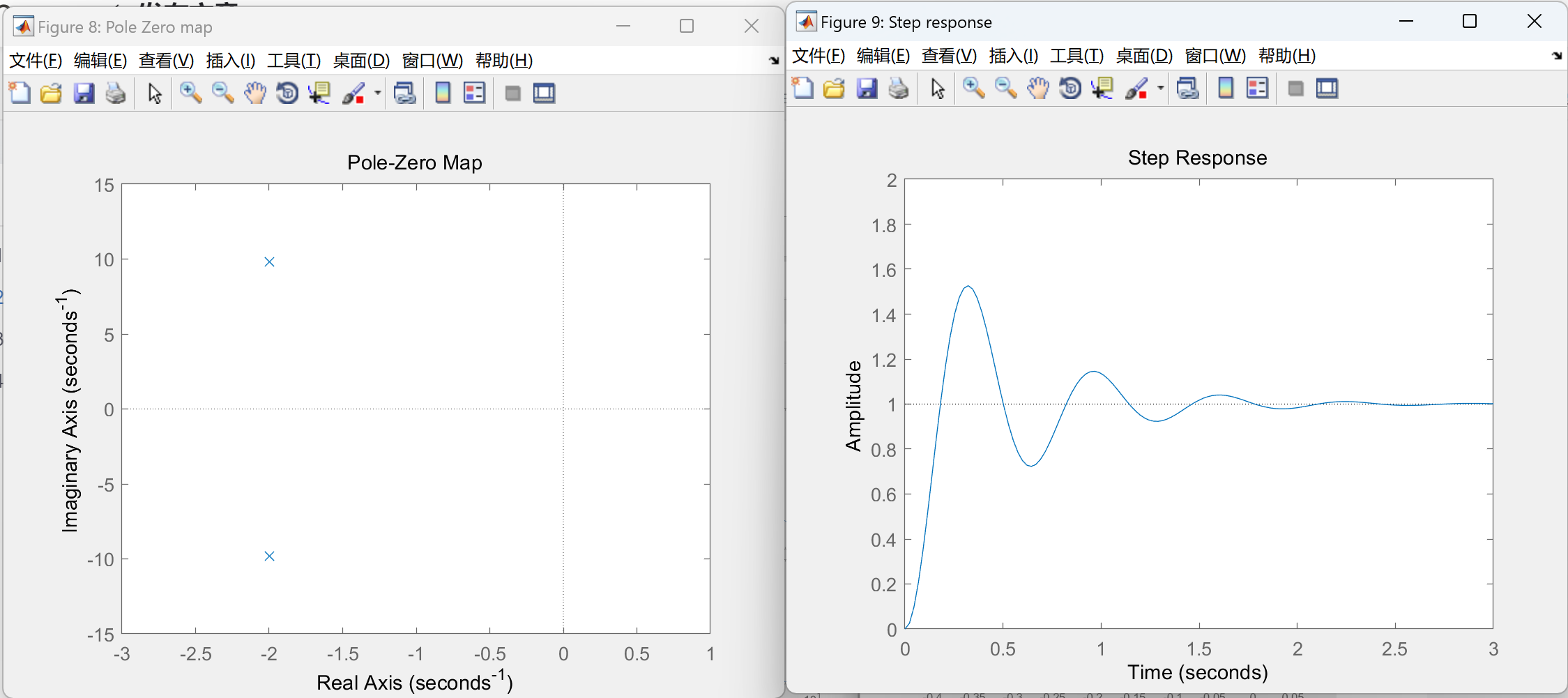
%% #2. Analysis of Second order system
k = 1;
wn = 10;
zeta = 0.2;
s = tf('s');
sys1 = k*wn^2/(s^2 + 2*zeta*wn*s + wn^2);
figure('Name','Pole Zero map')
pzmap(sys1);
axis([-3 1 -15 15]);
figure('Name','Step response')
step(sys1),%step response
axis([0 3 0 2])
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]王一云,严卫生,高剑,等.基于滑模变结构控制滤波的水下机器人水平面轨迹跟踪控制[J].计算机测量与控制, 2013, 21(2):4.DOI:10.3969/j.issn.1671-4598.2013.02.031.
[2]肖涛.基于Backstepping方法的水下机器人自适应滑模控制技术研究[D].哈尔滨工程大学[2024-04-08].DOI:10.7666/d.y1489305.
[3]董升亮.自主式水下机器人的滑模变结构控制研究与仿真[D].中国海洋大学[2024-04-08].

















 130
130

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









