







一.CAN总线简介:
- 是一种串行通信协议,能有效的支持具有很高安全等级的分布实时控制
- 应用范围十分广泛,从高速网络到低价位的多路接线都可以使用CAN
- 主要运用于汽车电子航天等行业,使用CAN连接发动机的控制单元等汽车部件
- 具有可靠,实时以及灵活的特性.
二.CAN工作原理:
- 以广播的形式发送报文.当CAN总线上的某个节点需要给其他节点发送消息时,会以广播的形式发送给总线上所有的节点,因为总线上的节点不适用地址来进行配置CAN系统,而是根据报文的开头的11位标识符决定是否要接受其他节点发来的报文.(面向内容的编制方案)
- 每个节点都有自己的处理器和CAN总线接口控制器;
- 当一个节点需要发送数据到另一个节点时,自身节点的处理器需要将要发送的数据和自己的标识符传给自身的总线控制接口,处于准备状态;当获取到总线的使用权后,将数据和标识符组装成报文,将报文以一定格式发出,此时其他的节点处于接收状态.至于其他节点是否接收,由其他节点决定,是都会对某些报文进行过滤.
- 当新增的节点仅仅是纯粹的数据接收设备时,只需要该设备直接从总线上接收数据即可.
三.总线工作的特点:
- 特权阶级.不论计算机还是真是社会中,都有特权阶级的存在,CAN总线上的节点会被划分为不同优先级,为满足的是不同的实时要求,采用的是非破坏性位仲裁总线结构机制,当两个节点同时向网络上传送信息时,优先级低的节点会主动的停止数据发送,优先级高的就可以不受影响继续传输数据.仲裁(Arbitration) 只要总线空闲,任何节点都可以向总线发送报文。如果有两个或两个以上的节点同时发送报文,就会引起总线访问碰撞。通过使用标识符的逐位仲裁可以解决这个碰撞。仲裁的机制确保了报文和时间均不损失。当具有相同标识符的数据帧和远程帧同时发送时,数据帧优先于远程帧。在仲裁期间,每一个发送器都对发送位的电平与被监控的总线电平进行比较。如果电平相同,则这个单元可以继续发送,如果发送的是“隐性”电平而监视到的是“显性”电平,那么这个单元就失去了仲裁,必须退出发送状态
- 报文(Message)总线上的数据以不同报文格式发送,但长度受到限制。当总线空闲时,任何一个网络上的节点都可以发送报文
- 信息路由(Information Routing)在CAN中,节点不使用任何关于系统配置的报文,比如站地址,由接收节点根据报文本身特征判断是否接收这帧信息。因此系统扩展时,不用对应用层以及任何节点的软件和硬件作改变,可以直接在CAN中增加节点
- 标识符(Identifier) 要传送的报文有特征标识符(是数据帧和远程帧的一个域),它给出的不是目标节点地址,而是这个报文本身的特征。信息以广播方式在网络上发送,所有节点都可以接收到。节点通过标识符判定是否接收这帧信息
- 数据一致性应确保报文在CAN里同时被所有节点接收或同时不接收,这是配合错误处理和再同步功能实现的
- 位传输速率不同的CAN系统速度不同,但在一个给定的系统里,位传输速率是唯一的,并且是固定的
- 优先权 由发送数据的报文中的标识符决定报文占用总线的优先权。标识符越小,优先权越高
- 远程数据请求(Remote Data Request) 通过发送远程帧,需要数据的节点请求另一节点发送相应的数据。回应节点传送的数据帧与请求数据的远程帧由相同的标识符命名
- 总线状态 总线有“显性”和“隐性”两个状态,“显性”对应逻辑“0”,“隐性”对应逻辑“1”。“显性”状态和“隐性”状态与为“显性”状态,所以两个节点同时分别发送“0”和“1”时,总线上呈现“0”。CAN总线采用二进制不归零(NRZ)编码方式,所以总线上不是“0”,就是“1”。但是CAN协议并没有具体定义这两种状态的具体实现方式
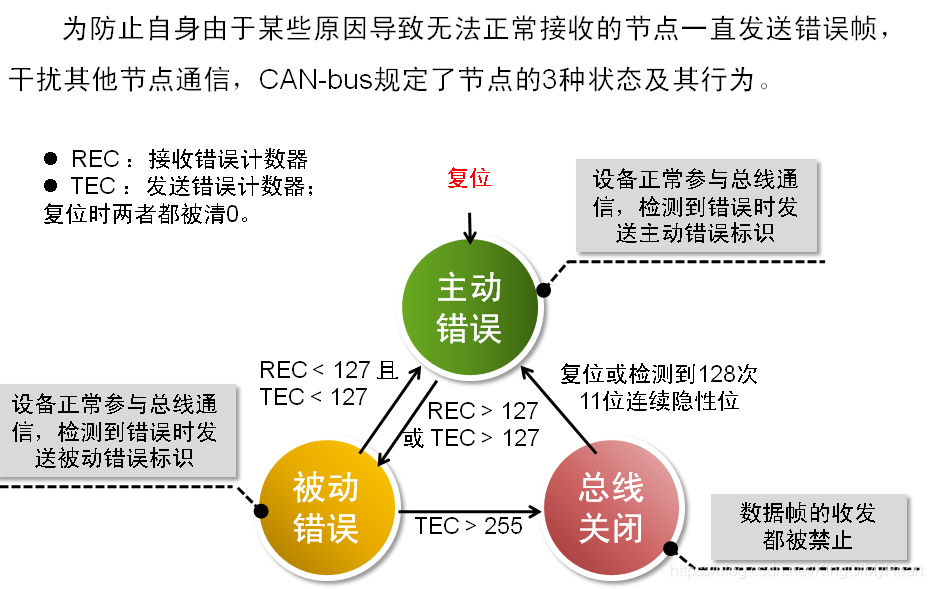
- 故障界定(Confinement) CAN节点能区分瞬时扰动引起的故障和永久性故障。故障节点会被关闭
- 应答接收节点对正确接收的报文给出应答,对不一致报文进行标记
- CAN通讯距离最大是10公里(设速率为5Kbps),或最大通信速率为1Mbps(设通信距离为40米)
- CAN总线上的节点数可达110个。通信介质可在双绞线,同轴电缆,光纤中选择
- 报文是短帧结构,短的传送时间使其受干扰概率低,CAN有很好的校验机制,这些都保证了
CAN通信的可靠性:
(1)具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点;
(2)采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作;
(3)具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到CAN-bus 上,形成多主机局部网络;
(4)可根据报文的ID决定接收或屏蔽该报文;
(5)可靠的错误处理和检错机制;
(6)发送的信息遭到破坏后,可自动重发;
(7)节点在错误严重的情况下具有自动退出总线的功能;
(8)报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
四.总线协议层次结构: 分为3层,物理层,传输层以及对象层
-
物理层:
在物理层中定义实际信号的传输方法,包括位的编码和解码、位的定时和同步等内容,作用是定义不同节点之间根据电气属性如何进行位的实际传输;
在物理连接上, CAN 总线结构提供两个引脚 --CANH 和 CANL ,总线通过 CANH 和 CANL 之间的差分电压完成信号的位传输;
在不同系统中, CAN 总线的位速率不同;在系统中, CAN 总线的位速率是唯一的,并且是固定的,这需要对总线中的每个节点配置统一的参数。 -
传输层:
传输层是 CAN 总线协议的核心。传输层负责把接收到的报文提供给对象层,以及接收来自对象层的报文。传输层负责位的定时及同步、报文分帧、仲裁、应答、错误检测和标定、故障界定。 -
对象层:
在对象层中可以为远程数据请求以及数据传输提供服务,确定由实际要使用的传输层接收哪一个报文,并且为恢复管理和过载通知提供手段.
五.CAN总线报文结构:
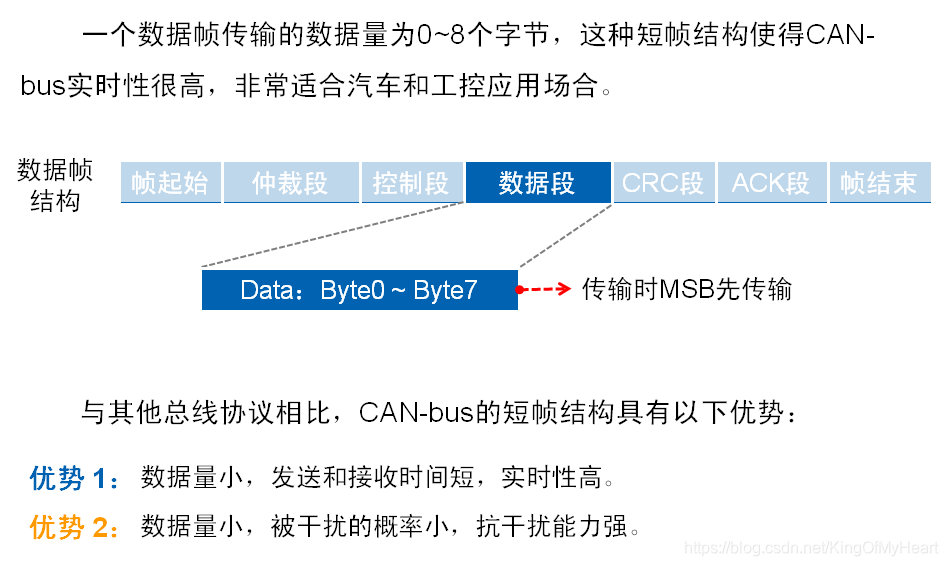
- 数据帧:大多数情况下使用的报文结构
从标识符长度上,又可以把数据帧分为标准帧 (11 位标识符 ) 和扩展帧 (29 位标识符 ) 。
数据帧由 7 个不同的位场组成:帧起始、仲裁场、控制场、数据场、 CRC 场、应答场、帧结束。其中,数据场的长度为 0~8 个字节。标识符位于仲裁场中,报文接收节点通过标识符进行报文滤波
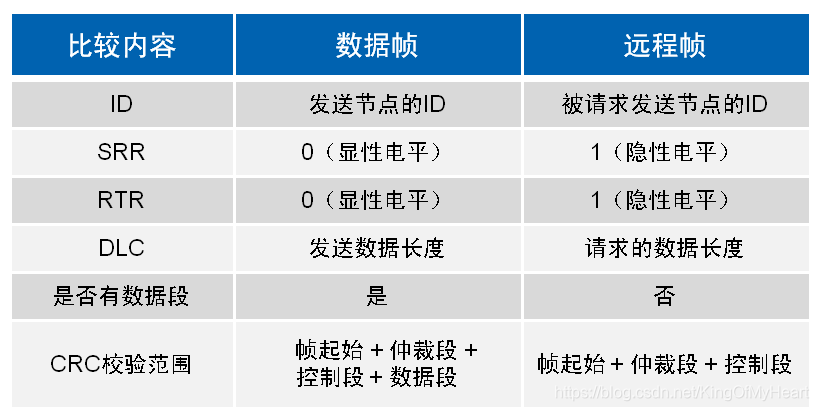
2.远程帧:用来向某一个节点请求数据
由总线上的节点发出,用于请求其他节点发送具有同一标识符的数据帧。当某个节点需要数据时,
可以发送远程帧请求另一节点发送相应数据帧。与数据帧相比,远程帧没有数据场,结构如图所示。
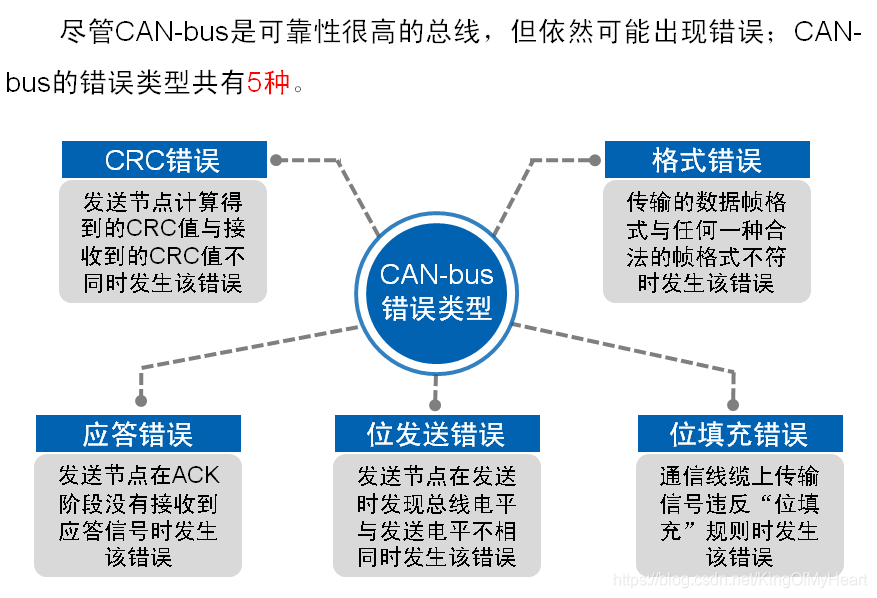
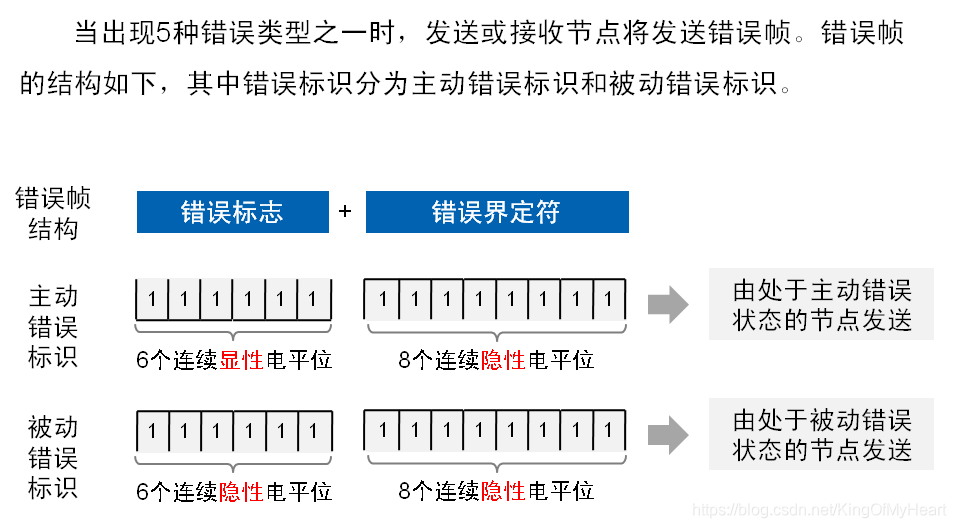
3.错误帧:任何单元,一旦检测到总线错误就发出错误帧
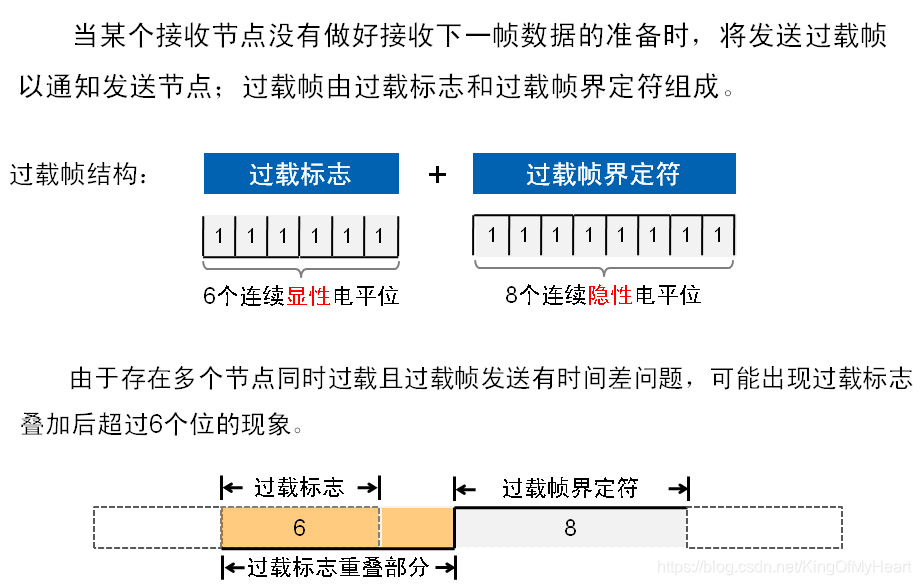
4.过载帧:用于先行和后续的数据帧或者远程帧之间提供附加延时,保证接收端能够来得及处理前面收到的数据,包括过载标志和过载界定符.
参考链接:https://blog.csdn.net/huan447882949/article/details/80042417

















 1196
1196

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









