






 本文详细描述了如何使用Matlab和Simulink构建电驱动履带车的转向控制模型,对比了PI和SMC控制算法,并针对大半径、中半径和原地转向工况进行了深入分析。研究结果有助于提升车辆操控性能和稳定性。
本文详细描述了如何使用Matlab和Simulink构建电驱动履带车的转向控制模型,对比了PI和SMC控制算法,并针对大半径、中半径和原地转向工况进行了深入分析。研究结果有助于提升车辆操控性能和稳定性。
matlab/simulink建模:双侧独立电驱动车辆转向控制
履带车考虑滑转滑移的转向控制模型,包含双侧独立电驱动履带车动力学模型,车速和横摆角速度控制器(基于pi和SMC两种控制算法对比),作业工具模型等。
工况:
1.大半径转向
2.中半径转向
3.原地转向
参考文献
:双侧独立电驱动履带车辆转向控制研究(哈工大)
大功率履带拖拉机耕耘机组稳定性研究(安徽农大)
ID:85810736256823081
只想安安静静赚钱
标题:基于 Matlab Simulink 的双侧独立电驱动车辆转向控制模型分析
摘要:
本文基于 Matlab Simulink 建立了一个考虑滑转滑移的转向控制模型,其中包含了双侧独立电驱动履带车的动力学模型、车速和横摆角速度控制器,并对比了基于 PI 和 SMC 两种控制算法的效果。同时,还加入了作业工具模型,以模拟真实的工况。通过这个模型,我们研究了大半径转向、中半径转向和原地转向的情况,并分析了各个工况下的转向控制特性。本研究参考了哈工大的《双侧独立电驱动履带车辆转向控制研究》和安徽农大的《大功率履带拖拉机耕耘机组稳定性研究》。
-
引言
电驱动车辆在农业、工业和军事领域中广泛应用,其中双侧独立电驱动履带车作为一种特殊型号,具有独特的转向控制需求。本文旨在研究和分析这类车辆在不同工况下的转向控制特性,以提高其操控性和稳定性。 -
研究方法
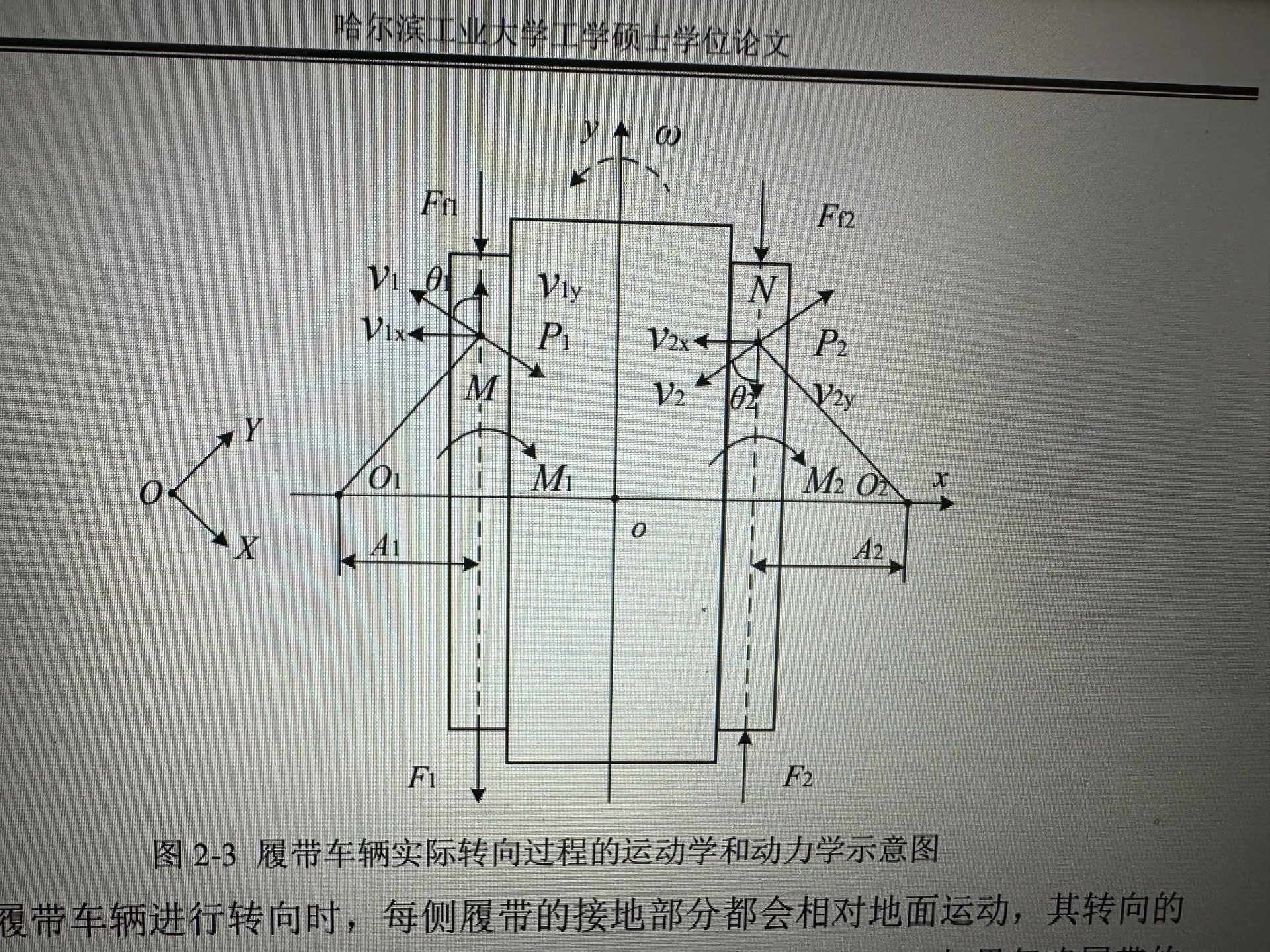
2.1 动力学模型建立
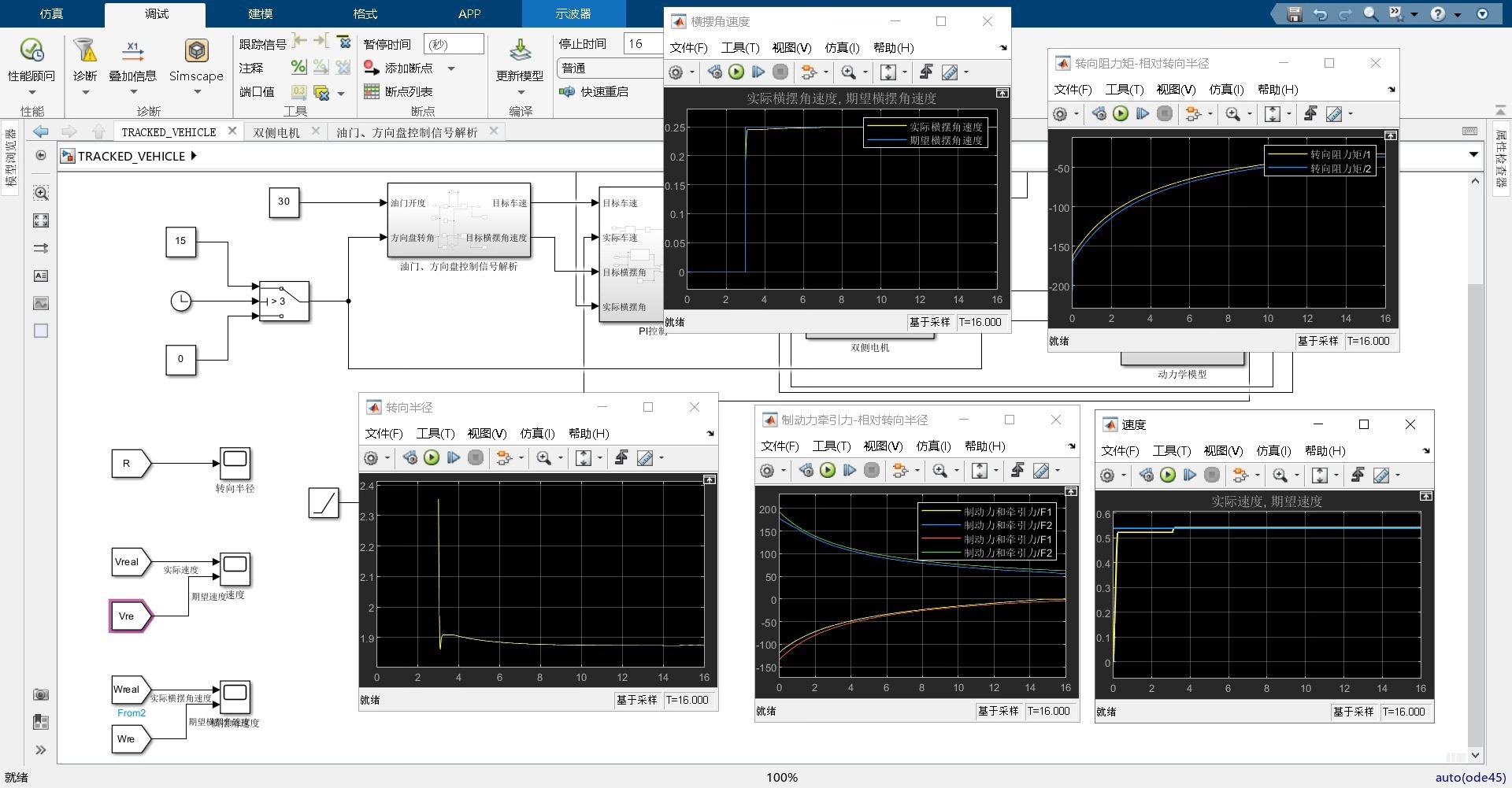
在 Matlab Simulink 中建立双侧独立电驱动履带车的动力学模型,考虑滑转滑移的影响。通过采集实际车辆运行数据和参数,建立真实可靠的模型。
2.2 控制器设计
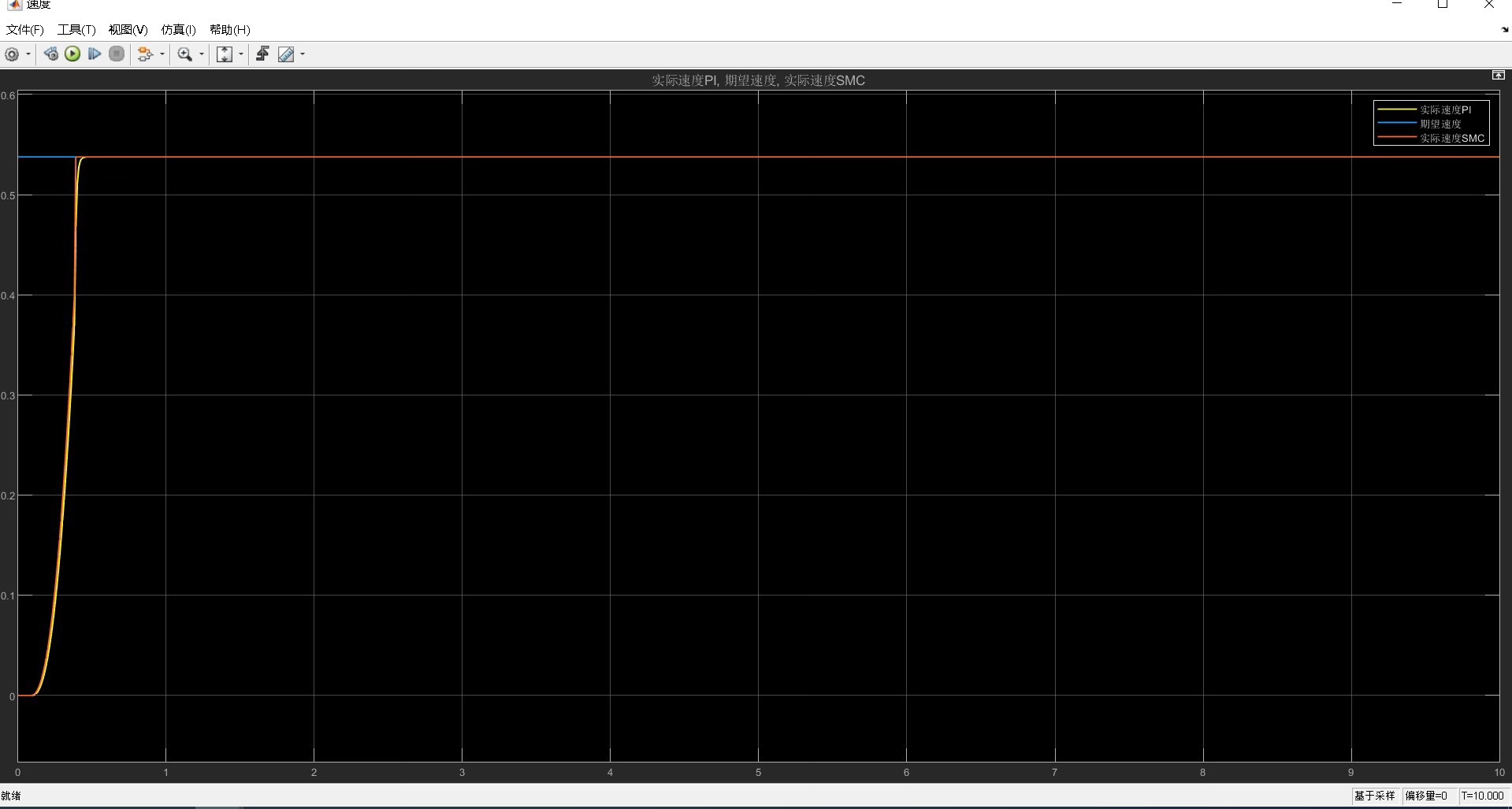
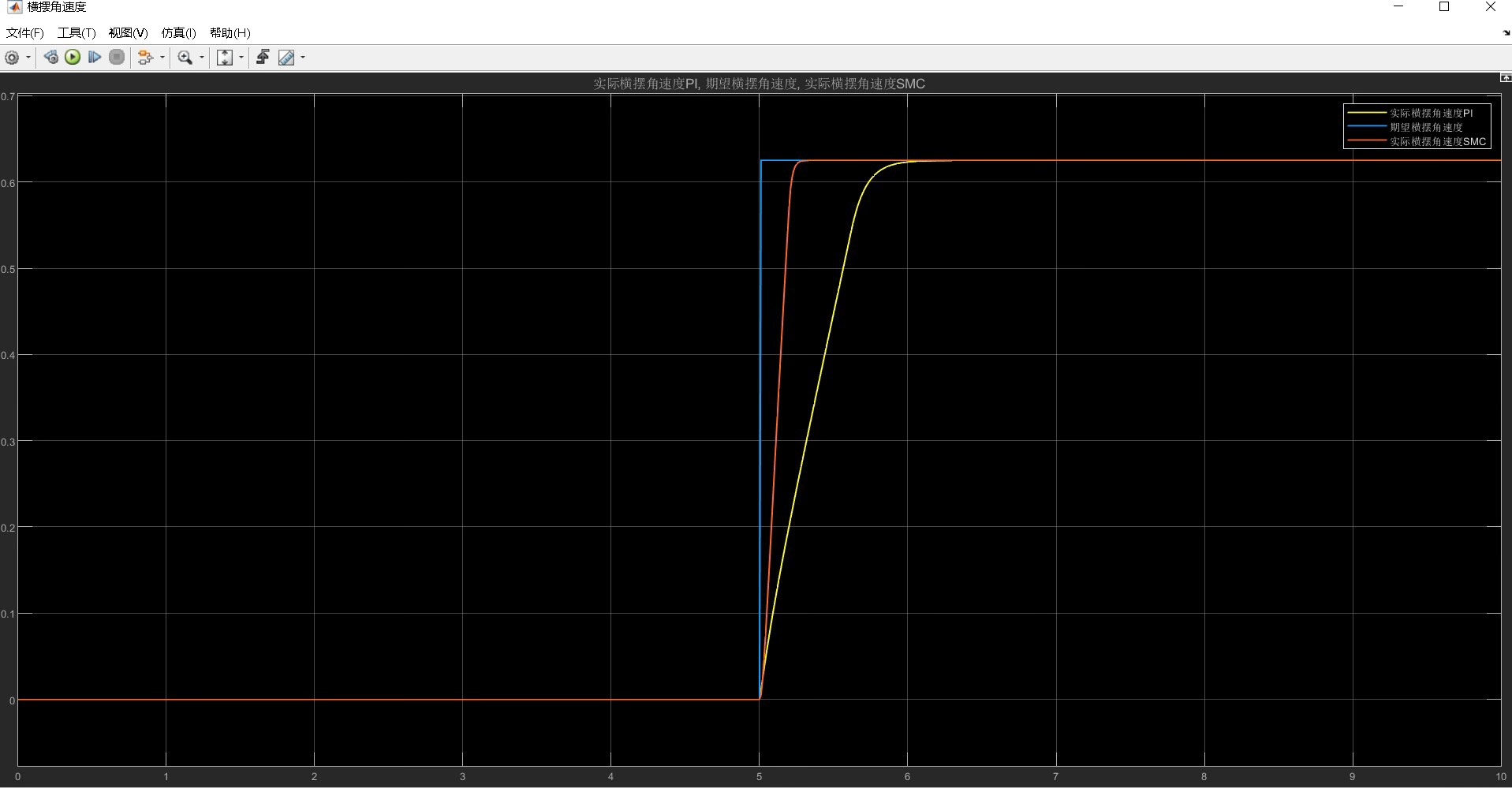
设计了两种控制算法,分别是 PI 控制和 SMC 控制。通过对比这两种算法在控制车速和横摆角速度时的效果,分析其优缺点,并选取最适合的控制算法应用于转向控制。
2.3 工况模拟
在转向控制模型中加入作业工具模型,模拟真实工况下的转向控制需求。具体包括大半径转向、中半径转向和原地转向等情况,并通过实验数据验证模型的准确性和稳定性。
- 结果与讨论
3.1 大半径转向控制分析
根据模拟结果分析了大半径转向工况下各个参数的变化情况,探讨了控制算法对转向响应速度和稳定性的影响。
3.2 中半径转向控制分析
对中半径转向工况的转向控制特点进行了分析与讨论,探讨了控制算法在不同工况下的适用性和效果。
3.3 原地转向控制分析
通过模型模拟原地转向过程,研究了转向过程中的动力学特性和控制算法的响应性、稳定性等方面的表现。
-
结论
通过对双侧独立电驱动履带车的转向控制模型进行建立和分析,本文提出了一种综合考虑滑转滑移的转向控制方案。通过对大半径、中半径和原地转向等工况的分析,可以看出采用适当的控制算法能够有效提高车辆的转向性能和操控稳定性。 -
参考文献
附录:模型参数及仿真结果
(文章内容仅供参考,请根据实际情况进行修改和完善)
相关代码 程序地址:http://nodep.cn/736256823081.html















 501
501











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









