






项目要求:
1.要求随机生成迷宫地图,并求解迷宫。
2.要求游戏支持玩家走迷宫,和系统走迷宫路径两种模式。玩家走迷宫,通过键盘方向键控制,并在行走路径上留下痕迹;系统走迷宫路径要求基于A*算法实现,输出走迷宫的最优路径并显示。
3.要求设计良好的交互界面。
算法思想:
Prim算法生成地图:
算法描述:
1. 把图中预置的通路节点分成两个集合,已经在通路里的属于U,未添加到通路里的属于V-U;
2. 任意选出一个点作为初始顶点,标记为visit,随机选择一个可达的顶点,并标记为visit,并将所联通路径上的顶点添加到U;
3. 重复以上操作,直到所有顶点都已经添加到集合U;
步骤:
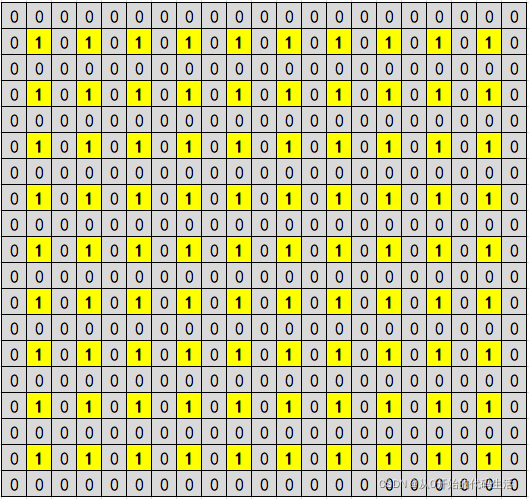
如图1首先先生成一个空地图:
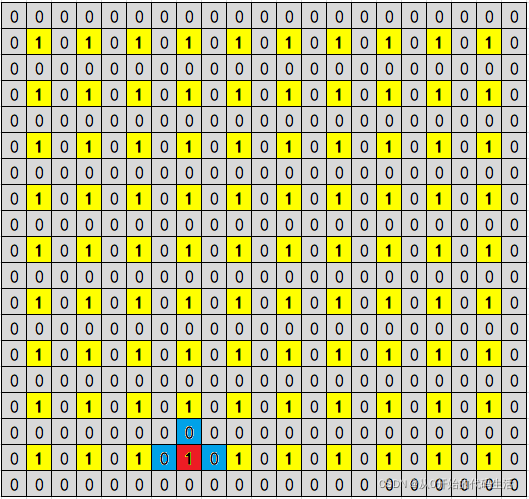
1.如图2随机选择一个蓝色0,然后看红色1隔着这个蓝色0对面的格子,是否是黄色的1,
1)如果是,则把对面的黄色1标记成红色1,即变成通路,然后把蓝色0变成红色的,即也变成通路;
2)如果不是,就把这个蓝色的0变成灰色的;
2.继续为红色通路集合寻找待定的蓝色0,然后随机选择一个蓝色0,然后看红色1隔着这个蓝色0对面的格子,是否是黄色的1,
1)如果是,则把对面的黄色1标记成红色1,即变成通路,然后把蓝色0变成红色的,即也变成通路;
2)如果不是,就把这个蓝色的0变成灰色的
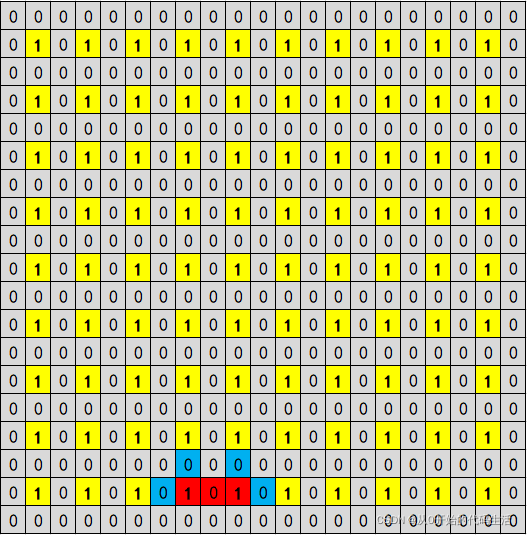
3)如果随机选的蓝色的0隔着红色1对面的不是黄色1,说明这不是一条通路,就把这个蓝色的0变成灰色0,变成确定的障碍物;
接下来就继续随机找另一个蓝色的0;
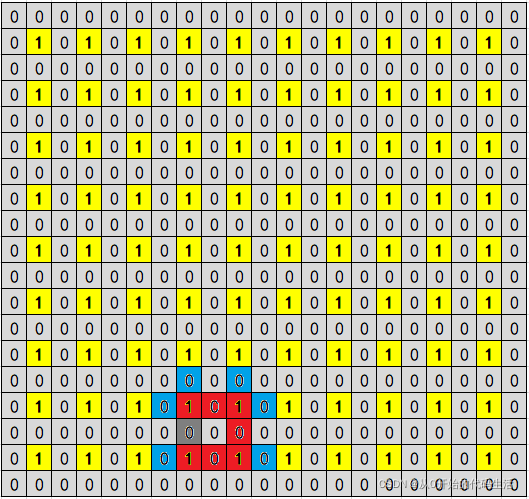
即不停地重复上面的步骤3,直到整个地图都没有蓝色0了,地图就生成完毕。
A*算法求解最优路径
算法描述:
搜索区域(The Search Area):搜索区域被划分为简单的二维数组,数组每个元素对应一个结点。
开放列表(Open List):将寻路过程中待检测的结点存放于Open List中,而已检测过的结点则存放于Close List中。
路径排序(Path Sorting):下一步怎么移动由以下公式确定;F(n)=G+H。F(n)为估价函数,G代表的是从初始位置Start沿着已生成的路径到指定待检测结点移动开销。H表示待检测结点到目标节点B的估计移动开销。
启发函数(Heuristics Function): H为启发函数,可以看作是一种试探,由于在找到唯一路径前,不确定在前面会出现什么障碍物,因此用了一种计算H的算法,具体可以根据实际情况决定。为了简化问题,H采用的是传统的曼哈顿距离,也就是横纵向走的距离之和。
步骤:
1. 把起点加入 open list 。
2.重复如下过程:
- 遍历 open list ,查找 F 值最小的节点,把它作为当前要处理的节点。
- 把这个节点移到 close list 。
- 对当前节点的 所有相邻的节点遍历,并分三种情况处理
1)如果相邻节点是不可抵达的或者它在 close list 中,忽略它。否则,做如下操作。
2)如果它不在 open list 中,把它加入 open list ,并且把当前节点设置为它的父亲,记录该方格的 F , G 和 H 值。
3)如果它已经在 open list 中,检查这条路径 ( 即经由当前节点到达它那里 ) 是否更好,用 G 值作参考。更小的 G 值表示这是更好的路径。如果是这样,把它的父亲设置为当前方格,并重新计算它的 G 和 F 值。如果你的 open list 是按 F 值排序的话,改变后你可能需要重新排序。
- 停止,当你把终点加入到了 open list 中,此时路径已经找到了,或者查找终点失败,并且 open list 是空的,此时没有路径。
3. 保存路径。从终点开始,每个方格沿着父节点移动直至起点,这就是你的路径。
代码实现:
MainFrame类:
package Proj_Labyrinth;
import javax.swing.*;
import java.awt.*;
import java.awt.event.KeyAdapter;
import java.awt.event.KeyEvent;
import java.awt.event.MouseAdapter;
import java.awt.event.MouseEvent;
import java.util.LinkedList;
public class MainFrame extends JFrame {
public static final int WALL = 0;
public static final int ROAD = 1;
public static final int AUTOTRACE = 2;
public static final int TRACE = 3;
public static final int GAME_WIDTH = 800;//窗体宽度
public static final int GAME_HEIGHT = 650;//窗体高度
private JPanel Gamepanel;
public static int[][] map = new generateMap().getMap();
private Player player;
private LinkedList<Node> trace;
private Node Start;
private Node End;
private boolean OpenAS = false;
public MainFrame() throws HeadlessException {
player = new Player();
trace = player.getTrace();
Start = new Node(1, 1);
End = new Node(39, 39);
//初始化窗口
initFrame();
//初始化画板,并生成随机地图
initGamepanel();
//添加功能按钮
setButton();
//设置键盘监听
setKeyboardListenner();
}
private void setKeyboardListenner() {
//玩家移动时,不能碰到墙壁
addKeyListener(new KeyAdapter() {
@Override
public void keyPressed(KeyEvent e) {
Node head = player.getTrace().getFirst();
switch (e.getKeyCode()) {
case KeyEvent.VK_UP: {
if (map[head.getX()][head.getY() - 1] != WALL) {
player.setDirection(Direction.UP);
player.move();
Gamepanel.repaint();
break;
}
}
case KeyEvent.VK_DOWN: {
if (map[head.getX()][head.getY() + 1] != WALL) {
player.setDirection(Direction.DOWN);
player.move();
Gamepanel.repaint();
break;
}
}
case KeyEvent.VK_LEFT: {
if (map[head.getX() - 1][head.getY()] != WALL) {
player.setDirection(Direction.LEFT);
player.move();
Gamepanel.repaint();
break;
}
}
case KeyEvent.VK_RIGHT: {
if (map[head.getX() + 1][head.getY()] != WALL) {
player.setDirection(Direction.RIGHT);
player.move();
Gamepanel.repaint();
break;
}
}
}
//到终点提示是否重新开始
if ((head.getX() + 1 == End.getX() && head.getY() == End.getY())
|| (head.getX() == End.getX() && head.getY() + 1 == End.getY())) {
int select = JOptionPane.showConfirmDialog(null, "恭喜你,游戏胜利" + "\n" + "是否重新开始", "走迷宫", JOptionPane.YES_NO_OPTION);
if (select == JOptionPane.YES_OPTION) {
map = new generateMap().getMap();
player = new Player();
trace = player.getTrace();
OpenAS = false;
Gamepanel.repaint();
}
}
}
});
requestFocus();
}
private void initGamepanel() {
Gamepanel = new JPanel() {
@Override
public void paint(Graphics g) {
for (int i = 0; i <= 41; i++) {
g.drawLine(0, i * 15, 615, i * 15);
}
for (int i = 0; i <= 41; i++) {
g.drawLine(i * 15, 0, i * 15, 615);
}
for (int rows = 0; rows <= 40; rows++) {
for (int cols = 0; cols <= 40; cols++) {
if (map[rows][cols] == WALL) {
g.setColor(Color.BLACK);
g.fillRect(rows * 15, cols * 15, 15, 15);
}
if (map[rows][cols] == ROAD) {
g.setColor(Color.yellow);
g.fillRect(rows * 15, cols * 15, 15, 15);
}
}
g.setColor(Color.blue);
g.fillRect(39 * 15, 39 * 15, 15, 15);
}
Node Head = trace.getFirst();
for (Node node : trace) {
if (node.getX() == Head.getX() && node.getY() == Head.getY()) {
g.setColor(Color.BLUE);
} else {
g.setColor(Color.RED);
}
g.fillRect(node.getX() * 15, node.getY() * 15, 15, 15);
map[node.getX()][node.getY()] = TRACE;
}
//绘制搜索结果路径
AStar A = new AStar();
for (int rows = 0; rows < A.getASmap().length; rows++) {
for (int cols = 0; cols < A.getASmap()[0].length; cols++) {
if (A.getASmap()[rows][cols] == AUTOTRACE) {
if ((rows == Start.getY() && cols == Start.getX()) || (rows == End.getY() && cols == End.getX())) {
continue;
}
if (OpenAS) {
g.setColor(Color.green);
g.fillRect(rows * 15, cols * 15, 15, 15);
}
if (!OpenAS) {
g.setColor(Color.yellow);
g.fillRect(rows * 15, cols * 15, 15, 15);
}
}
}
}
}
};
Gamepanel.setSize(615, GAME_HEIGHT);
add(Gamepanel);
}
private void setButton() {
//设置重开按钮
JButton restart;
restart = new JButton("重新开始");
restart.setBounds(650, 250, 100, 50);
restart.addMouseListener(new MouseAdapter() {
@Override
public void mouseClicked(MouseEvent e) {
map = new generateMap().getMap();
player = new Player();
trace = player.getTrace();
OpenAS = false;
Gamepanel.repaint();
requestFocus();
}
});
add(restart);
//设置自动寻路按钮:
JButton AutoSearch;
AutoSearch = new JButton("自动寻路");
AutoSearch.setBounds(650, 310, 100, 50);
AutoSearch.addMouseListener(new MouseAdapter() {
@Override
public void mouseClicked(MouseEvent e) {
OpenAS = true;
Gamepanel.repaint();
requestFocus();
}
});
add(AutoSearch);
//设置隐藏自动路径按钮
JButton Hide;
Hide = new JButton("隐藏路径");
Hide.setBounds(650, 370, 100, 50);
Hide.addMouseListener(new MouseAdapter() {
@Override
public void mouseClicked(MouseEvent e) {
OpenAS = false;
Gamepanel.repaint();
requestFocus();
}
});
add(Hide);
}
//初始化窗口
private void initFrame() {
setTitle("走迷宫");
setResizable(false);
setSize(GAME_WIDTH, GAME_HEIGHT);
setLayout(null);
setLocationRelativeTo(null);
setVisible(true);
setDefaultCloseOperation(JFrame.EXIT_ON_CLOSE);
setFocusable(true);
}
public static void main(String[] args) {
new MainFrame();
}
}
Node类(保存每个节点的信息):
package Proj_Labyrinth;
public class Node {
private int x;
private int y;
private int G;//G代表的是从初始位置Start沿着已生成的路径到指定待检测结点移动开销
private int H;//H表示待检测结点到目标节点End的估计移动开销
private int F;//F值表示每个节点的权值,即F=G+H
private Node parent;
public int getX() {
return x;
}
public void setX(int x) {
this.x = x;
}
public int getY() {
return y;
}
public void setY(int y) {
this.y = y;
}
public int getG() {
return G;
}
public void setG(int g) {
G = g;
}
public int getH() {
return H;
}
public void setH(int h) {
H = h;
}
public int getF() {
return F;
}
public void setF(int f) {
F = f;
}
public void calcF() {
this.F = this.G + this.H;
}
public Node getParent() {
return parent;
}
public void setParent(Node parent) {
this.parent = parent;
}
public Node(int x, int y) {
this.x = x;
this.y = y;
}
}
generateMap类(生成随机迷宫):
package Proj_Labyrinth;
import java.util.LinkedList;
import java.util.Random;
public class generateMap {
public static final int WALL = 0;//设置墙的参数
public static final int EMPTY = -1;//设置未组成路径的节点的参数
public static final int ROAD = 1;
public static final int mapWidth = 41;
public static final int mapHeight = 41;
private int[][] map;
private final int[][] dir;
private final Node Start;
public generateMap() {
//dir为4*2的方向数组,参数依次为左右上下
dir = new int[][]{{-1, 0}, {1, 0}, {0, -1}, {0, 1}};
Start = new Node(1, 1);
//初始化地图
initMap();
//Prim算法生成地图
PRIMCreate(Start.getX(), Start.getY());
}
public int[][] getMap() {
return map;
}
//为地图设置初始化参数
private void initMap() {
map = new int[mapHeight][mapWidth];
for (int rows = 0; rows < mapHeight; rows++) {
for (int cols = 0; cols < mapWidth; cols++) {
//边界设为WALL,即默认为墙,每个节点设为EMPTY
if (rows % 2 != 0 && cols % 2 != 0) {
map[rows][cols] = EMPTY;
}
}
}
map[Start.getX()][Start.getY()] = ROAD;
}
//判段选定节点是否有邻居节点
public boolean hasNeighbor(int x, int y) {
//对该节点的四个方向循环检索
for (int i = 0; i < 4; i++) {
if (inArea(x + 2 * dir[i][0], y + 2 * dir[i][1]) && map[x + 2 * dir[i][0]][y + 2 * dir[i][1]] == EMPTY)
return true;
}
return false;
}
//Prim算法生成地图参数, @param 起点坐标
private void PRIMCreate(int x, int y) {
//list用于存储遍历过的节点的坐标值
LinkedList<Node> list = new LinkedList<>();
Random random = new Random();
int i;
//随机选择一个蓝色0,然后看红色1(ROAD)隔着这个蓝色0对面的格子,是否是黄色的1{
while (hasNeighbor(x, y)) {
i = random.nextInt(4);
//如果是,则把对面的黄色1(EMPTY)标记成红色1(ROAD),即变成通路,然后把蓝色0变成红色的,即也变成通路;
if (inArea(x + 2 * dir[i][0], y + 2 * dir[i][1])
&& (map[x + 2 * dir[i][0]][y + 2 * dir[i][1]] == EMPTY)) {
map[x + 2 * dir[i][0]][y + 2 * dir[i][1]] = ROAD;
map[x + dir[i][0]][y + dir[i][1]] = ROAD;
//将标记的节点添加到list
list.add(new Node(x + 2 * dir[i][0], y + 2 * dir[i][1]));
}
//如果不是,就把这个蓝色的0变成灰色的;
else {
if (map[x + dir[i][0]][y + dir[i][1]] == ROAD) {
continue;
}
map[x + dir[i][0]][y + dir[i][1]] = WALL;
}
}
if (list.size() == 0) {
return;
}
//遍历所有经过的节点,并生成随机路径
for (Node node : list) {
PRIMCreate(node.getX(), node.getY());
}
}
//判断节点是否出界
private boolean inArea(int x, int y) {
return x > 0 && x < mapHeight - 1 && y > 0 && y < mapWidth - 1;
}
}
AStar类(A*算法搜索路径):
package Proj_Labyrinth;
import java.util.ArrayList;
import java.util.List;
public class AStar {
public final int AUTOTRACE = 2;//用于标记寻路路径
public int[][] ASmap;//定义一个迷宫单元数组
public int STEP = 1;//设每一步的权值为1
private ArrayList<Node> openList = new ArrayList<>();//定义一个开放列表
private ArrayList<Node> closeList = new ArrayList<>();//定义一个关闭列表
public AStar() {
ASmap = MainFrame.map;//初始化迷宫单元为新生成的对应地图,把generateMap类里面生成的地图传给NODES,再在此地图基础上用A*算法寻路径
Node startNode = new Node(1, 1);//起点
Node endNode = new Node(39, 39);//终点
Node parent = findPath(startNode, endNode); //父节点
ArrayList<Node> arrayList = new ArrayList<>();//路径搜索完后,所有的父节点所组成的路径就是最优路径,故用array list 来存储此路径
while (parent != null) {
arrayList.add(new Node(parent.getX(), parent.getY()));
parent = parent.getParent();
}
//把路径映射到地图上
for (int i = 0; i < ASmap.length; i++) {
for (int j = 0; j < ASmap.length; j++) {
if (exists(arrayList, i, j)) {
ASmap[i][j] = AUTOTRACE;//标记关闭列表里的方格为2,为了方便后面在界面画系统寻路路径
}
}
}
}
//寻找开放列表里F值最小的节点的方法
public Node findMinFNodeInOpneList() {
Node tempNode = openList.get(0);
for (Node node : openList) {
if (node.getF() < tempNode.getF()) {
tempNode = node;
}
}
return tempNode;
}
//遍历当前节点上下左右四个邻居的方法,
public ArrayList<Node> findNeighborNodes(Node currentNode) {
int[][] dir = new int[][]{{-1, 0}, {1, 0}, {0, -1}, {0, 1}};
ArrayList<Node> arrayList = new ArrayList<>();
// 只考虑上下左右,不考虑斜对角
int x = currentNode.getX();
int y = currentNode.getY();
for (int i = 0; i < 4; i++) {
if (canReach(x + dir[i][0], y + dir[i][1]) && !exists(closeList, x + dir[i][0], y + dir[i][1])) {
arrayList.add(new Node(x + dir[i][0], y + dir[i][1]));
}
}
return arrayList;
}
//判断此处坐标是否可达,若超界或者是墙则不可达
public boolean canReach(int x, int y) {
return x >= 0 && x < ASmap.length && y >= 0 && y < ASmap.length && ASmap[x][y] == 1;
}
//A*寻路过程
public Node findPath(Node startNode, Node endNode) {
openList.add(startNode);// 把起点加入open list
while (openList.size() > 0) {
Node currentNode = findMinFNodeInOpneList();// 遍历open list ,查找F值最小的节点,把它作为当前要处理的节点
openList.remove(currentNode);// 从open list中移除
closeList.add(currentNode);// 把这个节点移到 close list
ArrayList<Node> neighborNodes = findNeighborNodes(currentNode);
for (Node node : neighborNodes) {//遍历四个邻居
if (exists(openList, node)) {//如果相邻格在open list已经存在
foundPoint(currentNode, node);//计算G值并寻找最优路径
} else {
node.setParent(currentNode);
node.setG(calcG(node));
node.setH(calcH(endNode, node));
node.calcF();
openList.add(node);
}
}
if (find(openList, endNode) != null) {
return find(openList, endNode);//找到终点了并返回
}
}
return find(openList, endNode);
}
//在列表里可以找到节点后的情况
private void foundPoint(Node tempStart, Node node) {
int G = calcG(node);
if (tempStart.getG()<G) {//G值比较,选取G值小的做最优路径
node.setParent(tempStart);
node.setG(G);
node.calcF();
}
}
//计算G值的方法
private int calcG(Node node) {
int G = STEP;
int parentG = node.getParent() != null ? node.getParent().getG() : 0;
return G + parentG;
}
//计算H值的方法
private int calcH(Node end, Node node) {
int step = Math.abs(node.getX() - end.getX()) + Math.abs(node.getY() - end.getY());
return step * STEP;
}
//找到终点的方法
public Node find(List<Node> nodes, Node point) {
for (Node n : nodes)
if ((n.getX() == point.getX()) && (n.getY() == point.getY())) {
return n;
}
return null;
}
//下面两个是exist方法的重载,判断不同参数情况时节点是否在列表里
public boolean exists(List<Node> nodes, Node node) {
for (Node n : nodes) {
if ((n.getX() == node.getX()) && (n.getY() == node.getY())) {
return true;
}
}
return false;
}
public boolean exists(List<Node> nodes, int x, int y) {
for (Node n : nodes) {
if ((n.getX() == x) && (n.getY() == y)) {
return true;
}
}
return false;
}
public int[][] getASmap() {
return ASmap;
}
}
Player类(保存玩家路径和操控设置):
package Proj_Labyrinth;
import java.util.LinkedList;
public class Player {
private LinkedList<Node> trace;
private Direction direction = Direction.RIGHT;
public Player() {
trace =new LinkedList<>();
trace.add(new Node(1,1));
}
public LinkedList<Node> getTrace() {
return trace;
}
public void setTrace(LinkedList<Node> trace) {
this.trace = trace;
}
public void setDirection(Direction direction) {
this.direction = direction;
}
public void move() {
Node head = trace.getFirst();
switch (direction) {
case UP -> trace.addFirst(new Node(head.getX(), head.getY()-1));
case DOWN -> trace.addFirst(new Node(head.getX(), head.getY()+1));
case LEFT -> trace.addFirst(new Node(head.getX()-1, head.getY()));
case RIGHT -> trace.addFirst(new Node(head.getX()+1, head.getY()));
}
}
}
Direction类(方向设置):
package Proj_Labyrinth;
public enum Direction {
//方向枚举
UP,DOWN,RIGHT,LEFT
}
效果展示:
















 879
879

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









