









首先需要确定的一点是,step[i],step1(i),elemsize,elemsize1都是指的字节数
1 opencv中Mat类的elemsize是每个元素的字节数,如果一个图像是3通道,每个通道是16位,那么
其elemsize就是3*(16/8)=6,即每个元素占6个字节
2 opencv中Mat类的elemsize1是指每个元素每个通道所占的字节数,对应于上面就是2个字节
3 opencv中Mat类的step,step是一个数组,定义了矩阵的布局,需要注意的是几个固定的等式:
step1(i)=step[i]/elemsize1;step[m-1]=elemsize;其中m是图像的维数,step1(m-1)=channels;
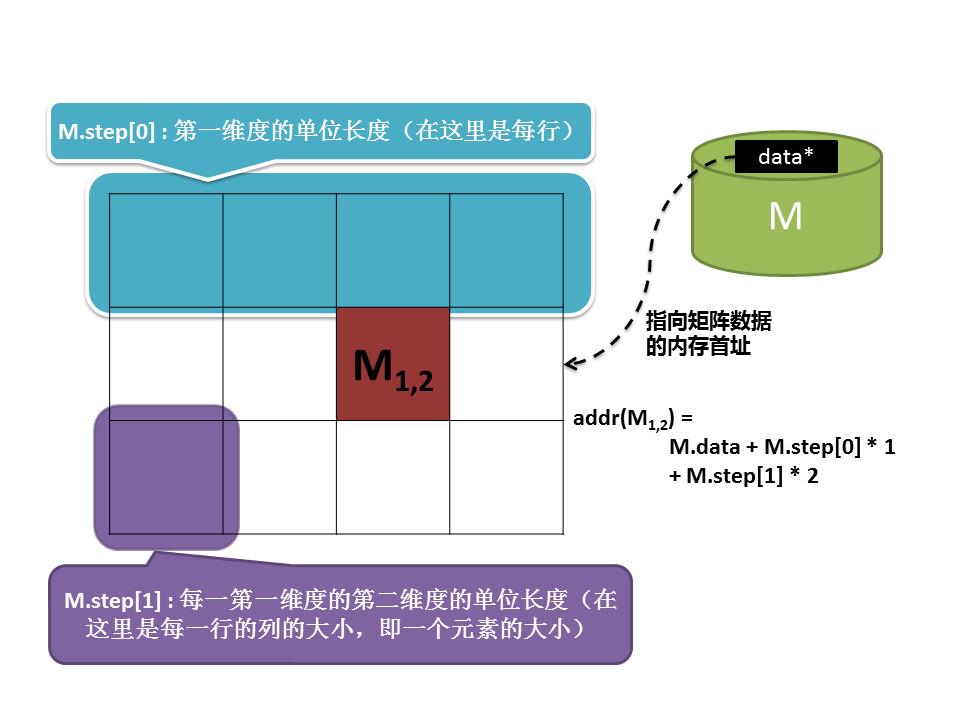
矩阵 (M) 中数据元素的地址计算公式:
addr(Mi0,i1,…im-1) = M.data + M.step[0] * i0 + M.step[1] * i1 + … + M.step[m-1] * im-1 (其中 m = M.dims M的维度)
下面举例:对于2维的情况:
一个 3 X 4 的矩阵,假设其数据类型为 CV_8U,也就是单通道的 uchar 类型
这是一个二维矩阵,那么维度为 2 (M.dims == 2);
M.rows == 3; M.cols == 4;
sizeof(uchar) = 1,那么每一个数据元素大小为 1 (M.elemSize() == 1, M.elemSize1() == 1);
CV_8U 得到 M.depth() == 0, M.channels() == 1;
因为是二维矩阵,那么 step 数组只有两个值, step[0] 和 step[1] 分别代表一行的数据大小和一个元素的数据大小,则 M.step[0] == 4, M.step[1] == 1;
M.step1(0) == M.cols = 4; M.step1(1) == 1;
假设上面的矩阵数据类型是 CV_8UC3,也就是三通道
M.dims == 2; M.channels() == 3;M.depth() == 0;
M.elemSize() == 3 (每一个元素包含3个uchar值) M.elemSize1() == 1 (elemSize / channels)
M.step[0] == M.cols * M.elemSize() == 12, M.step[1] == M.channels() * M.elemSize1() == M.elemSize() == 3;
M.step(0) == M.cols * M.channels() == 12 ; M.step(1) == M.channels() == 3;
对于3维时:
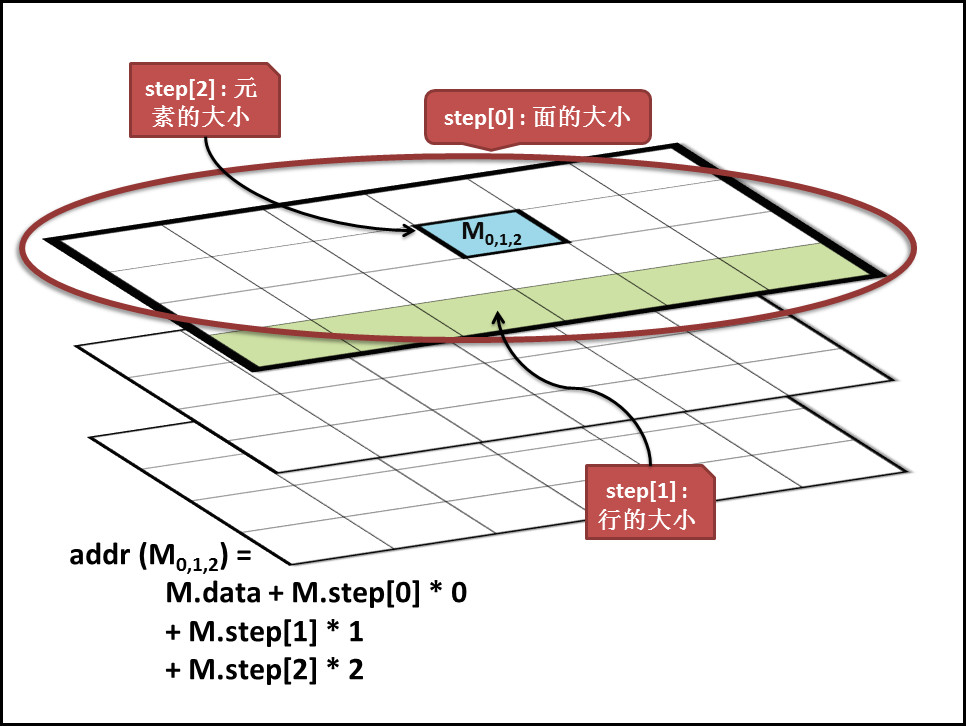
上面是一个 3 X 4 X 6 的矩阵,假设其数据类型为 CV_16SC4,也就是 short 类型
M.dims == 3 ; M.channels() == 4 ; M.elemSize1() == sizeof(short) == 2 ;
M.rows == M.cols == –1;
M.elemSize() == M.elemSize1() * M.channels() == M.step[M.dims-1] == M.step[2] == 2 * 4 == 8;
M.step[0] == 4 * 6 * M.elemSize() == 192;
M.step[1] == 6 * M.elemSize() == 48;
M.step[2] == M.elemSize() == 8;
M.step1(0) == M.step[0] / M.elemSize() == 192 / 2 == 96 (第一维度(即面的元素个数) * 通道数);
M.step1(1) == M.step[1] / M.elemSize() == 48 / 2 == 24(第二维度(即行的元素个数/列宽) * 通道数);
M.step1(2) == M.step[2] / M.elemSize() == M.channels() == 4(第三维度(即元素) * 通道数);















 7744
7744

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









