







一、超声波测距概述
(1)超声波时间差测距原理
- 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
- 超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340*t/2。这就是所谓的时间差测距法。
- 超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。由此可见,超声波测距原理与雷达原理是一样的。测距的公式表示为:L=C✖️T(式中L为测量的距离长度;C为超声波在空气中的传播速度;T为测量距离传播的时间差(T为发射到接收时间数值的一半))
(2)超声波应用
- 超声波测距主要应用于倒车提醒、机器人、建筑工地、工业现场等的距离测量,虽然目前的测距量程上能达到百米,但测量的精度往往只能达到厘米数量级。
- 超声波易于定向发射、方向性好、强度易控制、与被测量物体不需要直接接触的优点,是作为液体高度测量的理想手段。
二、超声波测距原理
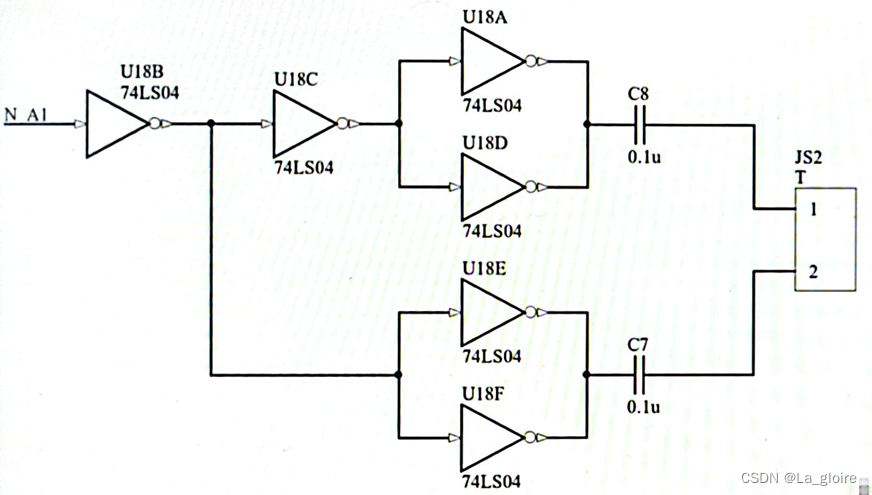
(1)超声波发射电路
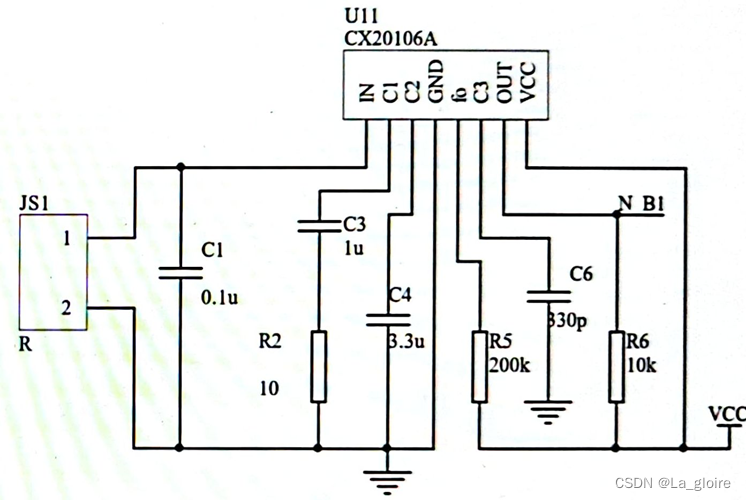
(2)超声波接收电路
(3)超声波/红外选择跳线
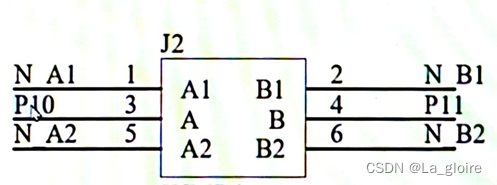
- N A1-P10 N B1-P11可以使用P10和P11操作超声波发射模块
- N A2-P10 N B2-P11使用的红外
三、超声波测距应用
(0)编写逻辑
- 产生8个40KHz的超声波信号,通过TX引脚发射出去。
- 启动定时器,开始计时。
- 等待超声波信号返回,如果接收到反射回来的信号,RX引脚变为低电平
- 停止定时器,读取脉冲个数,即获得时间T.
- 根据公式,L=V*T/2 m,进行距离的计算。
(1)变量


(2)函数
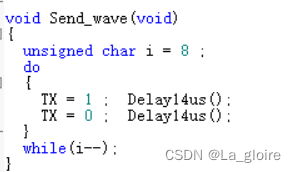
(每14us发射一次,发射八次)
(3)主函数
(4)完整代码
#include<STC15.H>
#include<intrins.H>
sbit TX = P1^0 ;//超声波发射引脚
sbit RX = P1^1 ;
unsigned char LED_Bit=0XFF;
unsigned char Actuator_Bit=0X00;
#define LEDx_ON(n) { LED_Bit&=_crol_(0XFE,n-1); P0=LED_Bit; P2|=0X80; P2&=0X9F; P2&=0X1F;}
#define LEDx_OFF(n) { LED_Bit|=_crol_(0X01,n-1); P0=LED_Bit; P2|=0X80; P2&=0X9F; P2&=0X1F;}
#define Buzzer_ON Actuator_Bit|=0x40; P0=Actuator_Bit; P2|=0XA0; P2&=0XBF; P2&=0X1F;
#define Buzzer_OFF Actuator_Bit&=0XBF; P0=Actuator_Bit; P2|=0XA0; P2&=0XBF; P2&=0X1F;
#define Relay_ON Actuator_Bit|=0x10; P0=Actuator_Bit; P2|=0XA0; P2&=0XBF; P2&=0X1F;
#define Relay_OFF Actuator_Bit&=0XEF; P0=Actuator_Bit; P2|=0XA0; P2&=0XBF; P2&=0X1F;
unsigned char tab[]={0XC0,0XF9,0XA4,0XB0,0X99,0X92,0X82,0XF8,0X80,0X90,0XBF,0XFF};
unsigned char KEY_Value = 0 ;
unsigned char DigCom=0;
unsigned char DigBuf[8] = {10,10,10,10,10,10,10,10};
unsigned char LED = 1 ;
unsigned int LED_tt =0;
bit LED_Ref = 0 ;
unsigned int SEG_tt =0; //定义一个数码管计数时间标识位
bit SEG_Ref = 0 ; //定义一个数码管刷新标识位
bit SEG_Run = 0 ; //定义一个控制数码管运行标识位
unsigned int Num = 999 ;
unsigned int LCM_tt = 0 ;//超声波计数时间标识位
bit LCM_Ref = 0 ; //超声波刷新标识位
unsigned int LCM = 0 ; //存储超声波测距
unsigned int LCM_Time = 0 ;//定时器计时超声波从发出到返回的时间
void ALL_Init(void);
void Delay_MS(unsigned int MS);
void KeyScan(void);
void ArrKeyScan(void);
void Timer0Init(void); //1毫秒@11.0592MHz
void Send_wave(void);
void Timer1Init(void);
void main(void)
{
IO_Init();
ALL_Init();
Timer0Init();
Timer1Init();
EA=1;ET0=1;
while(1)
{
KeyScan();
// ArrKeyScan();
if(KEY_Value==7){KEY_Value=0;SEG_Run = 1 ;}
if(KEY_Value==6){KEY_Value=0;SEG_Run = 0 ;}
if(KEY_Value==5){KEY_Value=0;LEDx_ON(1);Buzzer_ON;}
if(KEY_Value==4){KEY_Value=0;LEDx_OFF(1);Buzzer_OFF;}
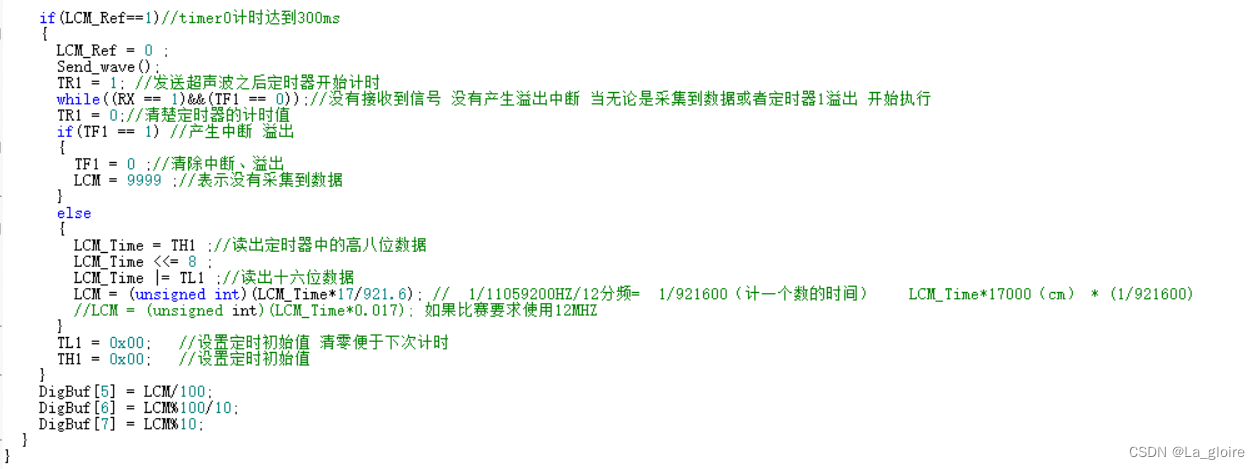
if(LCM_Ref==1)//timer0计时达到300ms
{
LCM_Ref = 0 ;
Send_wave();
TR1 = 1; //发送超声波之后定时器开始计时
while((RX == 1)&&(TF1 == 0));//没有接收到信号 没有产生溢出中断 当无论是采集到数据或者定时器1溢出 开始执行
TR1 = 0;//清楚定时器的计时值
if(TF1 == 1) //产生中断 溢出
{
TF1 = 0 ;//清除中断、溢出
LCM = 9999 ;//表示没有采集到数据
}
else
{
LCM_Time = TH1 ;//读出定时器中的高八位数据
LCM_Time <<= 8 ;
LCM_Time |= TL1 ;//读出十六位数据
LCM = (unsigned int)(LCM_Time*17/921.6); // 1/11059200HZ/12分频= 1/921600(计一个数的时间) LCM_Time*17000(cm) * (1/921600)
//LCM = (unsigned int)(LCM_Time*0.017); 如果比赛要求使用12MHZ
}
TL1 = 0x00; //设置定时初始值 清零便于下次计时
TH1 = 0x00; //设置定时初始值
}
DigBuf[5] = LCM/100;
DigBuf[6] = LCM%100/10;
DigBuf[7] = LCM%10;
}
}
void Timer1Init(void) //0毫秒@11.0592MHz
{
AUXR &= 0xBF; //定时器时钟12T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x00; //设置定时初始值
TH1 = 0x00; //设置定时初始值
TF1 = 0; //清除TF1标志
// TR1 = 1; //定时器1开始计时
}
void Delay14us() //@11.0592MHz
{
unsigned char i;
_nop_();
i = 45;
while (--i);
}
void Send_wave(void)
{
unsigned char i = 8 ;
do
{
TX = 1 ; Delay14us();
TX = 0 ; Delay14us();
}
while(i--);
}
void KeyScan(void)
{
if(P30==0)
{
Delay_MS(10);
if(P30==0)KEY_Value = 7 ;
while(!P30);
}
else if(P31==0)
{
Delay_MS(10);
if(P31==0)KEY_Value = 6 ;
while(!P31);
}
else if(P32==0)
{
Delay_MS(10);
if(P32==0)KEY_Value = 5 ;
while(!P32);
}
else if(P33==0)
{
Delay_MS(10);
if(P33==0)KEY_Value = 4 ;
while(!P33);
}
}
void Timer0(void) interrupt 1
{
P0=0X00;
P2|=0XC0; // P2=P2|0XC0; XXXX XXXX | 1100 0000 = 11XX XXXX
P2&=0XDF; // P2=P2&0XDF; 11XX XXXX & 1101 1111 = 110X XXXX
P2&=0X1F; //关闭所有的74HC573锁存器
P0=tab[DigBuf[DigCom]];
P2|=0XE0; // P2=P2|0XE0; XXXX XXXX | 1110 0000 = 111X XXXX
P2&=0XFF; // P2=P2&0XDF; 11XX XXXX & 1101 1111 = 110X XXXX
P2&=0X1F; //关闭所有的74HC573锁存器
P0=(0X01<<DigCom); //然后选中第一个数码管
P2|=0XC0; // P2=P2|0XC0; XXXX XXXX | 1100 0000 = 11XX XXXX
P2&=0XDF; // P2=P2&0XDF; 11XX XXXX & 1101 1111 = 110X XXXX
P2&=0X1F; //关闭所有的74HC573锁存器
if(++DigCom == 8)DigCom = 0 ;
LED_tt++;
if(LED_tt == 999) {LED_tt = 0 ; LED_Ref = 1 ;}
if(++SEG_tt==1000){SEG_tt=0;SEG_Ref=1;}
if(++LCM_tt==300){LCM_tt = 0 ; LCM_Ref = 1 ;}//假设每300ms进行一次测量
}
void Timer0Init(void) //1毫秒@11.0592MHz
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0xCD; //设置定时初始值
TH0 = 0xD4; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
void Delay_MS(unsigned int MS)
{
unsigned i,j;
for(i=0;i<MS;i++)
for(j=853;j>0;j--);
}
void ALL_Init(void)
{
P0 =0X00; //先设置关闭蜂鸣器继电器的P0输出值(全关)
P2|=0XA0; // 将P27 P25 设置为1 其他位保持不变
P2&=0XBF; // 将P26设置为0 其他位保持不变
P2&=0X1F; //关闭所有的74HC573锁存器
P0 =0XFF; //先设置关闭所有的LED的P0输出值(全关)
P2|=0X80; // 将P27设置为1 其他位保持不变
P2&=0X9F; // 将P26 P25设置为0 其他位保持不变
P2&=0X1F; //关闭所有的74HC573锁存器
P0 =0X00; //先设置选择数码管位选的P0输出值(全不选)
P2|=0XC0; // 将P27 P26 设置为1 其他位保持不变
P2&=0XDF; // 将P26设置为0 其他位保持不变
P2&=0X1F; //关闭所有的74HC573锁存器
}

















 3090
3090

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









