




项目场景:
在ubuntu20.04中使用MID360获取激光点云数据和内置6轴陀螺仪数据
先用一分三线连接好 雷达-电脑 & 雷达-电源

安装过程:
1. 安装Livox-SDK2
cd ~/
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install2. 编译安装FAST_LIO源码
mkdir livox_ws/src
git clone https://github.com/Livox-SDK/livox_ros_driver2.git
cd src/livox_ros_driver2
./build.sh ROS13. 配置电脑IP参数
打开“设置” > 打开“网络” > 点击“有线”旁边的设置选项 > 选择“IPv4” > 配置电脑IP地址 > 选择“手动”
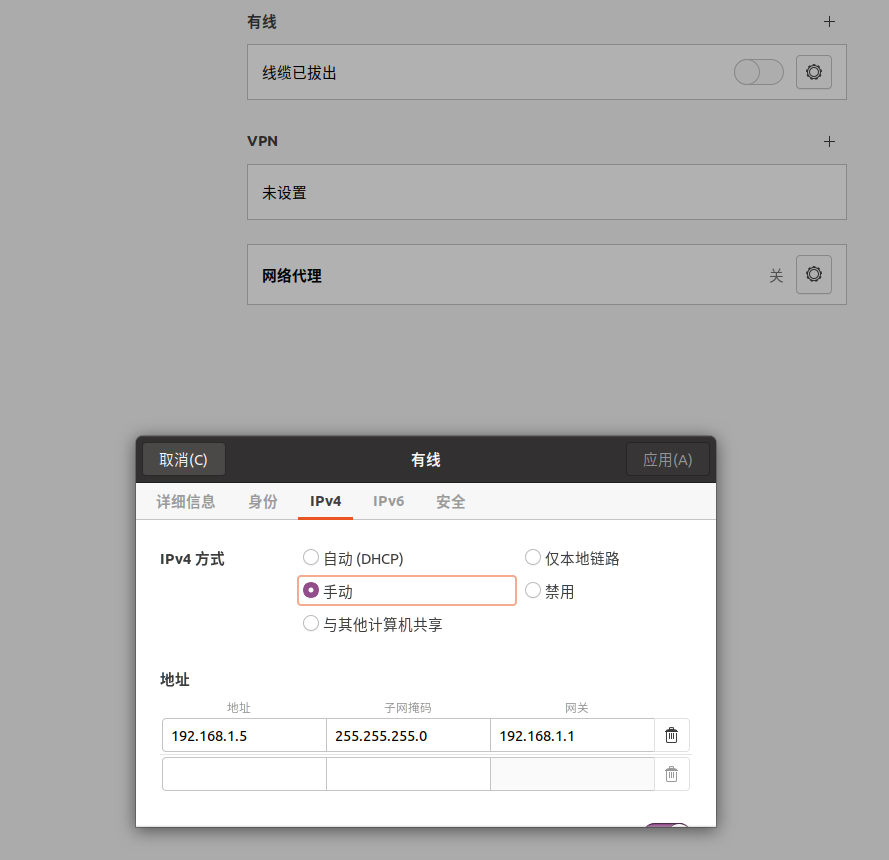
具体要求:
地址:192.168.1.5子网掩码:255.255.255.0
网关:192.168.1.1
4. 配置Livox mid360参数
打开文件: ~/livox_ws/src/livox_ros_driver2/config/MID360_config.json,修改如下:
其中:
修改后的电脑ip即为上一步中的“地址”:192.168.1.5
Livox mid360的ip为:192.168.1.1XX(XX为你的MID360雷达上二维码下方SN码的最后两位)

{
"lidar_summary_info" : {
"lidar_type": 8
},
"MID360": {
"lidar_net_info" : {
"cmd_data_port": 56100,
"push_msg_port": 56200,
"point_data_port": 56300,
"imu_data_port": 56400,
"log_data_port": 56500
},
"host_net_info" : {
"cmd_data_ip" : "192.168.1.5", # <-修改后的电脑ip
"cmd_data_port": 56101,
"push_msg_ip": "192.168.1.5", # <-修改后的电脑ip
"push_msg_port": 56201,
"point_data_ip": "192.168.1.5", # <-修改后的电脑ip
"point_data_port": 56301,
"imu_data_ip" : "192.168.1.5", # <-修改后的电脑ip
"imu_data_port": 56401,
"log_data_ip" : "",
"log_data_port": 56501
}
},
"lidar_configs" : [
{
"ip" : "192.168.1.176", # <-Livox mid360的ip
"pcl_data_type" : 1,
"pattern_mode" : 0,
"extrinsic_parameter" : {
"roll": 0.0,
"pitch": 0.0,
"yaw": 0.0,
"x": 0, 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3061
3061

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









