步骤拆解:
1.
初始化

2.
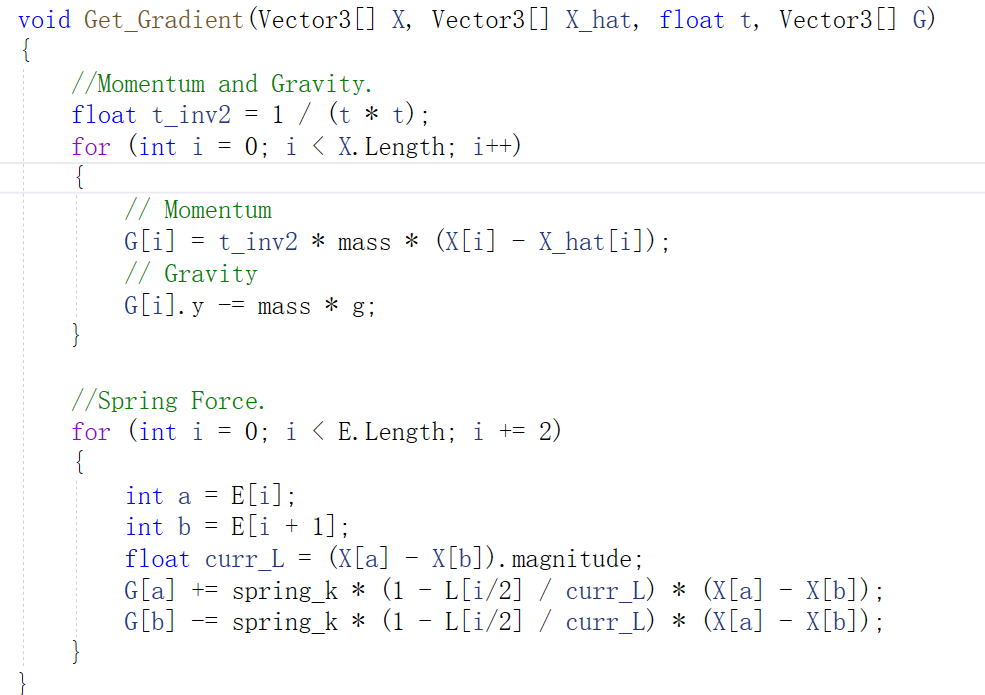
完成Get_Gradient(X,X_hat,t,G)函数
3.
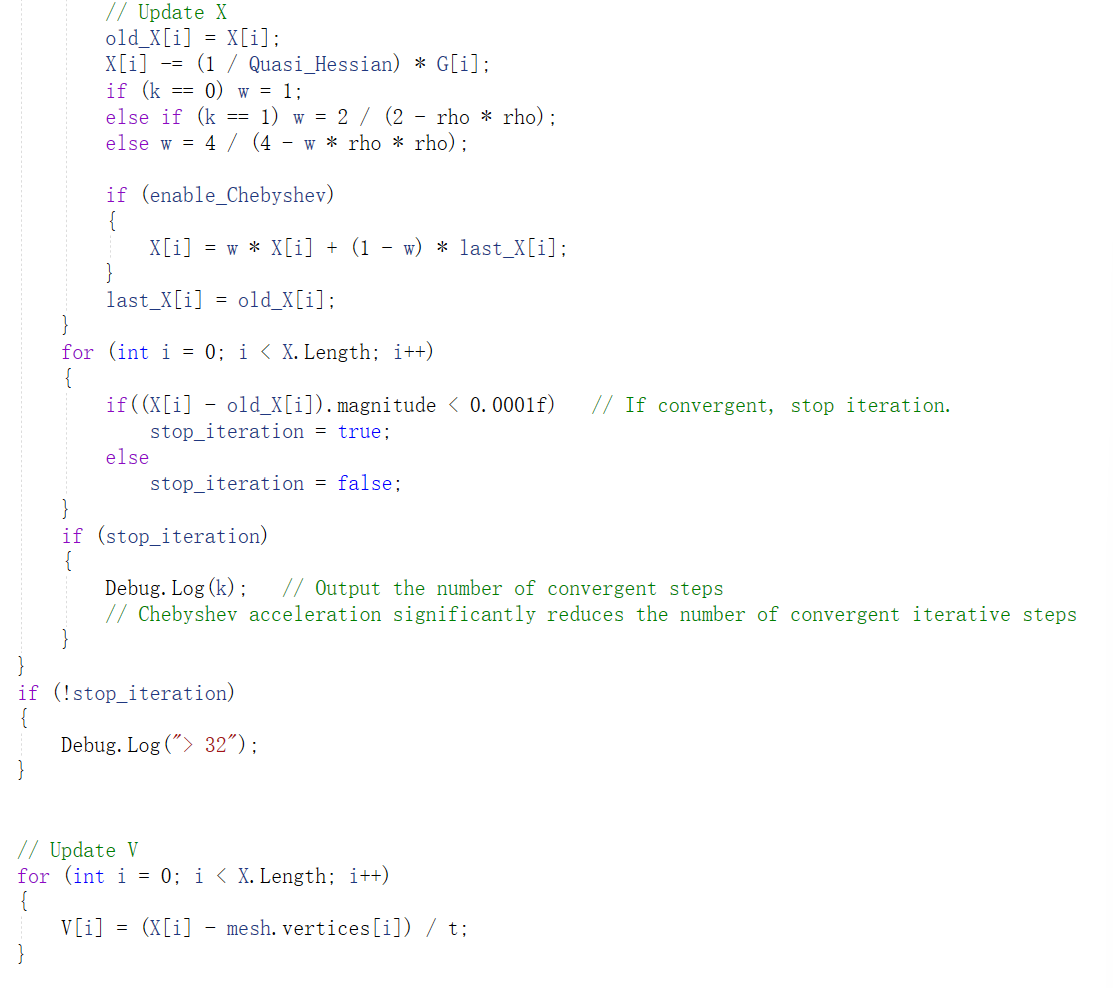
通过Gradient梯度G更新位置X和速度
4.
完成Collision_Handling函数

完整CS代码:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class implicit_model : MonoBehaviour
{
float t = 0.0333f;
float mass = 1;
float damping = 0.99f;
float rho = 0.995f;
float spring_k = 8000;
int[] E; // Edge
float[] L; // Length
Vector3[] V; // Velocity
float g = -9.8f; // gravity
int n = 0;
GameObject sphere;
// Start is called before the first frame update
void Start()
{
sphere = GameObject.Find("Sphere");
Mesh mesh = GetComponent<MeshFilter>().mesh;
//Resize the mesh.
int n = 21;
Vector3[] X = new Vector3[n * n];
Vector2[] UV = new Vector2[n * n];
int[] triangles = new int[(n - 1) * (n - 1) * 6];
for (int j = 0; j < n; j++)
for (int i = 0; i < n; i++)
{
X[j * n + i] = new Vector3(5 - 10.0f * i / (n - 1), 0, 5 - 10.0f * j / (n - 1));
UV[j * n + i] = new Vector3(i / (n - 1.0f), j / (n - 1.0f));
}
int t = 0;
for (int j = 0; j < n - 1; j++)
for (int i = 0; i < n - 1; i++)
{
triangles[t * 6 + 0] = j * n + i;
triangles[t * 6 + 1] = j * n + i + 1;
triangles[t * 6 + 2] = (j + 1) * n + i + 1;
triangles[t * 6 + 3] = j * n + i;
triangles[t * 6 + 4] = (j + 1) * n + i + 1;
triangles[t * 6 + 5] = (j + 1) * n + i;
t++;
}
mesh.vertices = X;
mesh.triangles = triangles;
mesh.uv = UV;
mesh.RecalculateNormals();
//Construct the original E
int[] _E = new int[triangles.Length * 2];
for (int i = 0; i < triangles.Length; i += 3)
{
_E[i * 2 + 0] = triangles[i + 0];
_E[i * 2 + 1] = triangles[i + 1];
_E[i * 2 + 2] = triangles[i + 1];
_E[i * 2 + 3] = triangles[i + 2];
_E[i * 2 + 4] = triangles[i + 2];
_E[i * 2 + 5] = triangles[i + 0];
}
//Reorder the original edge list
for (int i = 0; i < _E.Length; i += 2)
if (_E[i] > _E[i + 1])
Swap(ref _E[i], ref _E[i + 1]);
//Sort the original edge list using quicksort
Quick_Sort(ref _E, 0, _E.Length / 2 - 1);
int e_number = 0;
for (int i = 0; i < _E.Length; i += 2)
if (i == 0 || _E[i + 0] != _E[i - 2] || _E[i + 1] != _E[i - 1])
e_number++;
E = new int[e_number * 2];
for (int i = 0, e = 0; i < _E.Length; i += 2)
if (i == 0 || _E[i + 0] != _E[i - 2] || _E[i + 1] != _E[i - 1])
{
E[e * 2 + 0] = _E[i + 0];
E[e * 2 + 1] = _E[i + 1];
e++;
}
L = new float[E.Length / 2];
for (int e = 0; e < E.Length / 2; e++)
{
int v0 = E[e * 2 + 0];
int v1 = E[e * 2 + 1];
L[e] = (X[v0] - X[v1]).magnitude;
}
V = new Vector3[X.Length];
for (int i = 0; i < V.Length; i++)
V[i] = new Vector3(0, 0, 0);
}
void Quick_Sort(ref int[] a, int l, int r)
{
int j;
if (l < r)
{
j = Quick_Sort_Partition(ref a, l, r);
Quick_Sort(ref a, l, j - 1);
Quick_Sort(ref a, j + 1, r);
}
}
int Quick_Sort_Partition(ref int[] a, int l, int r)
{
int pivot_0, pivot_1, i, j;
pivot_0 = a[l * 2 + 0];
pivot_1 = a[l * 2 + 1];
i = l;
j = r + 1;
while (true)
{
do ++i; while (i <= r && (a[i * 2] < pivot_0 || a[i * 2] == pivot_0 && a[i * 2 + 1] <= pivot_1));
do --j; while (a[j * 2] > pivot_0 || a[j * 2] == pivot_0 && a[j * 2 + 1] > pivot_1);
if (i >= j) break;
Swap(ref a[i * 2], ref a[j * 2]);
Swap(ref a[i * 2 + 1], ref a[j * 2 + 1]);
}
Swap(ref a[l * 2 + 0], ref a[j * 2 + 0]);
Swap(ref a[l * 2 + 1], ref a[j * 2 + 1]);
return j;
}
void Swap(ref int a, ref int b)
{
int temp = a;
a = b;
b = temp;
}
void Collision_Handling()
{
Mesh mesh = GetComponent<MeshFilter>().mesh;
Vector3[] X = mesh.vertices;
//Handle colllision.
for (int i = 0; i < X.Length; i++)
{
float t_inv = 1 / t;
float r = 2.7f;
Vector3 c = sphere.transform.position;
// Signed Distance Function
float phi = (X[i] - c).magnitude - r;
// impulse-based collision response
if (phi < 0)
{
Vector3 n = (X[i] - c).normalized;
V[i] += t_inv * (c + r * n - X[i]);
X[i] = c + r * n;
}
}
mesh.vertices = X;
}
void Get_Gradient(Vector3[] X, Vector3[] X_hat, float t, Vector3[] G)
{
//Momentum and Gravity.
float t_inv2 = 1 / (t * t);
for (int i = 0; i < X.Length; i++)
{
// Momentum
G[i] = t_inv2 * mass * (X[i] - X_hat[i]);
// Gravity
G[i].y -= mass * g;
}
//Spring Force.
for (int i = 0; i < E.Length; i += 2)
{
int a = E[i];
int b = E[i + 1];
float curr_L = (X[a] - X[b]).magnitude;
G[a] += spring_k * (1 - L[i/2] / curr_L) * (X[a] - X[b]);
G[b] -= spring_k * (1 - L[i/2] / curr_L) * (X[a] - X[b]);
}
}
// Update is called once per frame
void Update()
{
Mesh mesh = GetComponent<MeshFilter>().mesh;
Vector3[] X = mesh.vertices;
Vector3[] last_X = new Vector3[X.Length];
Vector3[] old_X = new Vector3[X.Length];
Vector3[] X_hat = new Vector3[X.Length];
Vector3[] G = new Vector3[X.Length];
//Initial Setup.
for (int i = 0; i < X.Length; i++)
{
// Damping
V[i] *= damping;
// Initial guess
X_hat[i] = X[i] + t * V[i];
X[i] = X_hat[i];
}
float w = 0.0f;
bool enable_Chebyshev = true; // Enable Chebyshev Acceleration
bool stop_iteration = false; // If convergent, stop iteration.
for (int k = 0; k < 32; k++)
{
if (stop_iteration)
{
break;
}
Get_Gradient(X, X_hat, t, G);
//Update X by gradient.
for (int i = 0; i < X.Length; i++)
{
// Fixed particles
if (i == 0 || i == 20)
continue;
// Quasi Hessian
float t_inv2 = 1 / (t * t);
float Quasi_Hessian = t_inv2 * mass + 4 * spring_k;
// Update X
old_X[i] = X[i];
X[i] -= (1 / Quasi_Hessian) * G[i];
if (k == 0) w = 1;
else if (k == 1) w = 2 / (2 - rho * rho);
else w = 4 / (4 - w * rho * rho);
if (enable_Chebyshev)
{
X[i] = w * X[i] + (1 - w) * last_X[i];
}
last_X[i] = old_X[i];
}
for (int i = 0; i < X.Length; i++)
{
if((X[i] - old_X[i]).magnitude < 0.0001f) // If convergent, stop iteration.
stop_iteration = true;
else
stop_iteration = false;
}
if (stop_iteration)
{
Debug.Log(k); // Output the number of convergent steps
// Chebyshev acceleration significantly reduces the number of convergent iterative steps
}
}
if (!stop_iteration)
{
Debug.Log("> 32");
}
// Update V
for (int i = 0; i < X.Length; i++)
{
V[i] = (X[i] - mesh.vertices[i]) / t;
}
//Finishing.
mesh.vertices = X;
Collision_Handling();
mesh.RecalculateNormals();
}
}























 1394
1394











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









