







文章目录
前言
本人的GAMES103笔记,以下分节根据知识点来分。同时包含了个人的一点补充。
1. Introduction
课程主页:http://games-cn.org/games103/
B站链接:https://www.bilibili.com/video/BV12Q4y1S73g?from=search&seid=2084315763141666934&spm_id_from=333.337.0.0
课程作业:http://games103.games-cn.org/
课程安排:
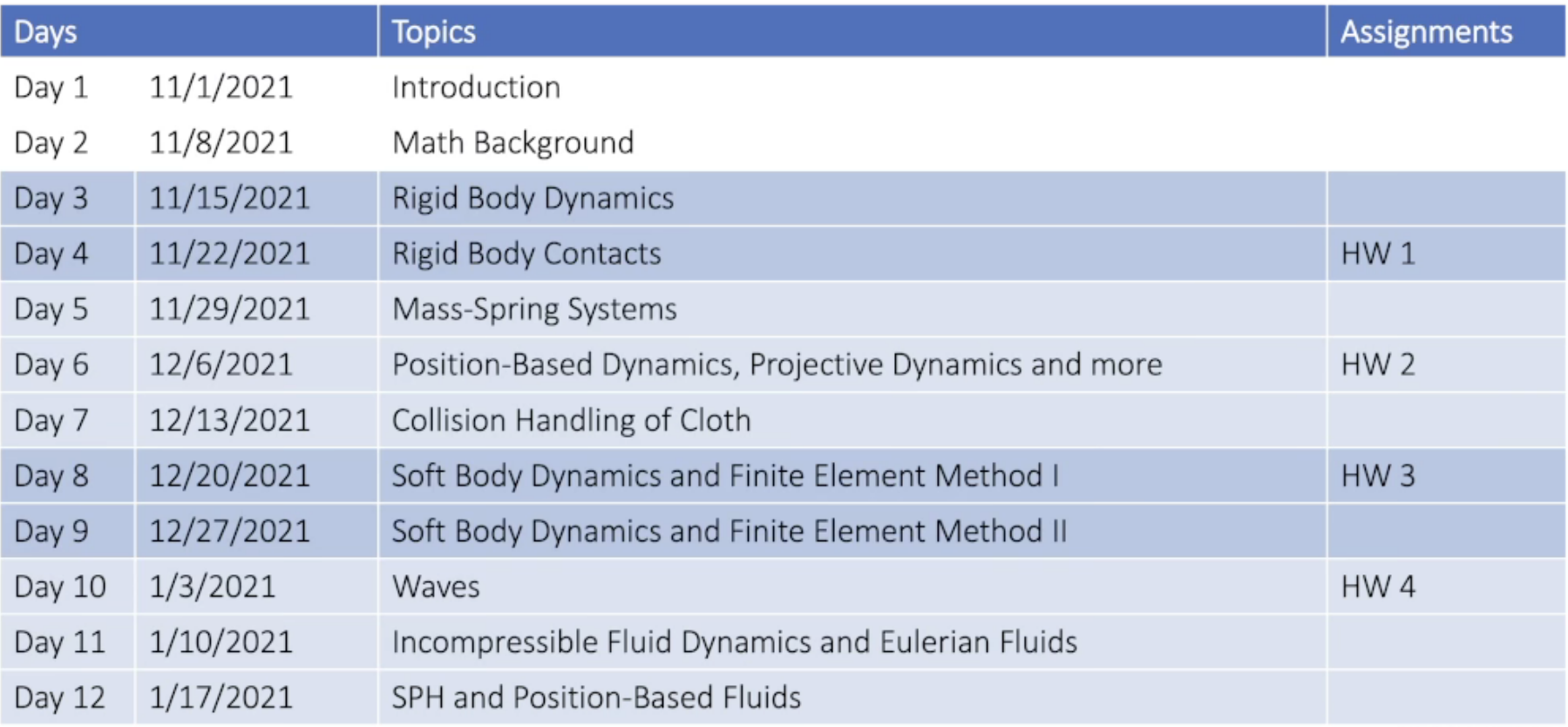
理想情况下管线:几何Geometry =》动画Animation =》渲染Rendering
Geometry 的三种表达方式:
- Mesh:分为structured mesh(有一定规律的,因此有些几何算法就可以利用这些规律做文章)和unstructured mesh(没有什么规律的,通用性就更强)
- Point Cloud(点云):直接给点云是没法用硬件做渲染的,因此有问题比如如何去构造mesh,如何重新采样,如何找近邻等等。
- Volumetric Grid:医学、科学实验很多原始数据都是,比如CT、大气的流体模拟。
Rendering:
- Non-Photorealistic 非真实感渲染
- Photorealistic 真实感渲染
两种类型:基于光线追踪的和基于传统渲染管线的。
基于物理的计算机动画(physics-based animation):
本质上是更新每一帧的状态。
两个时刻之间的东西叫做步长。步长可以和帧率一致也可以不一致,完全可以低于帧率。比如渲染一帧用更多的时间步长去模拟,取决于引擎的设计。
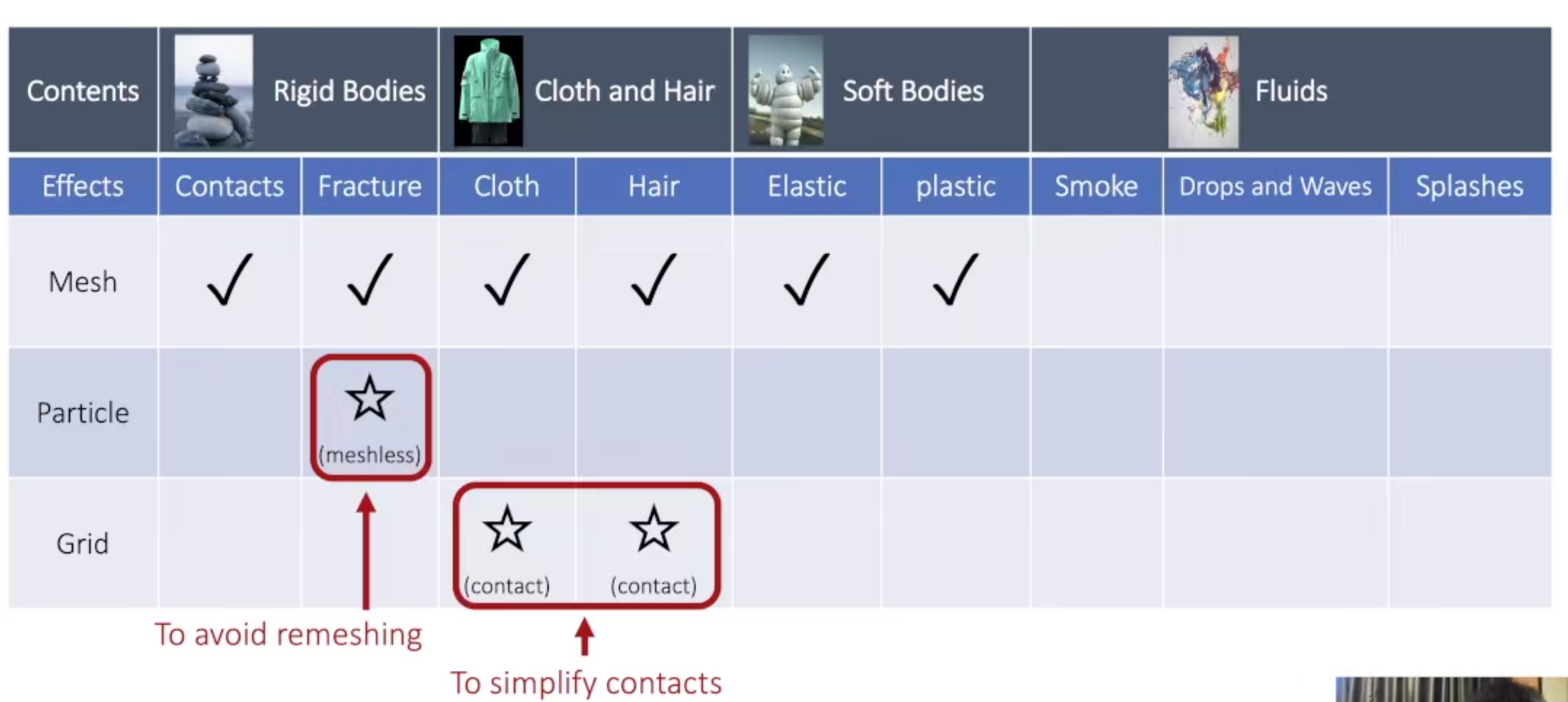
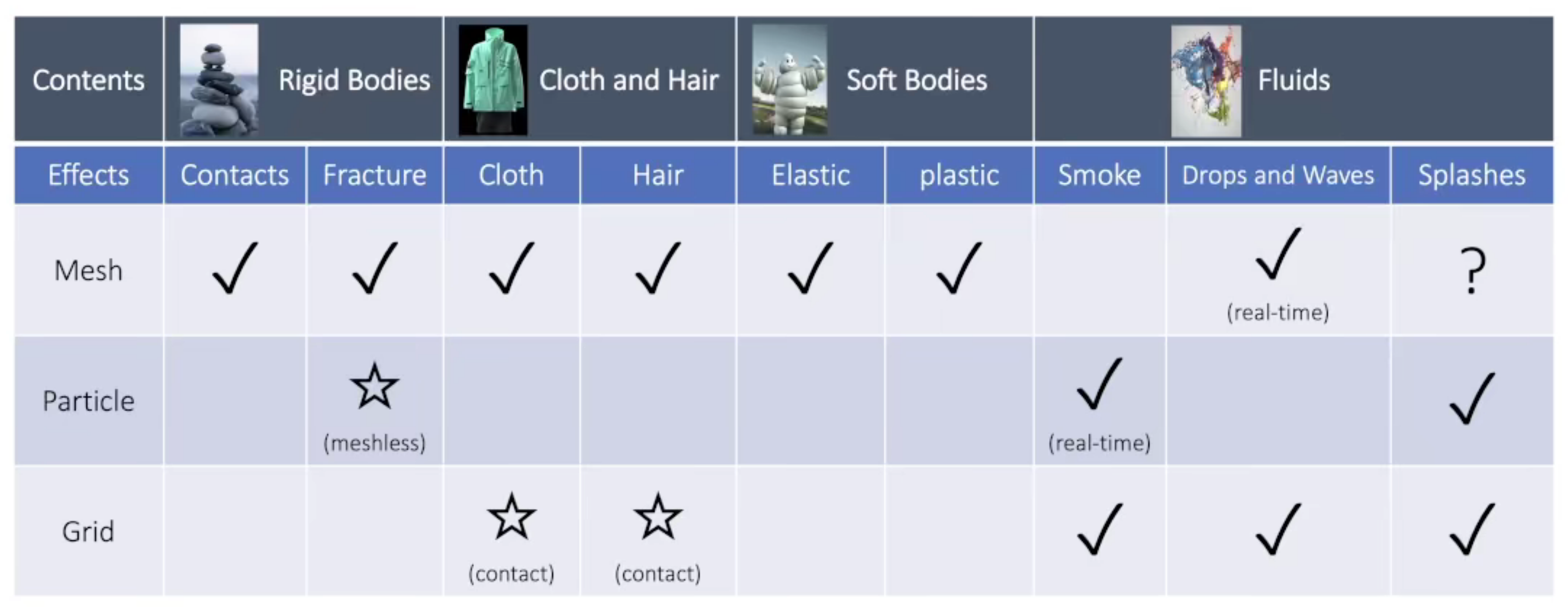
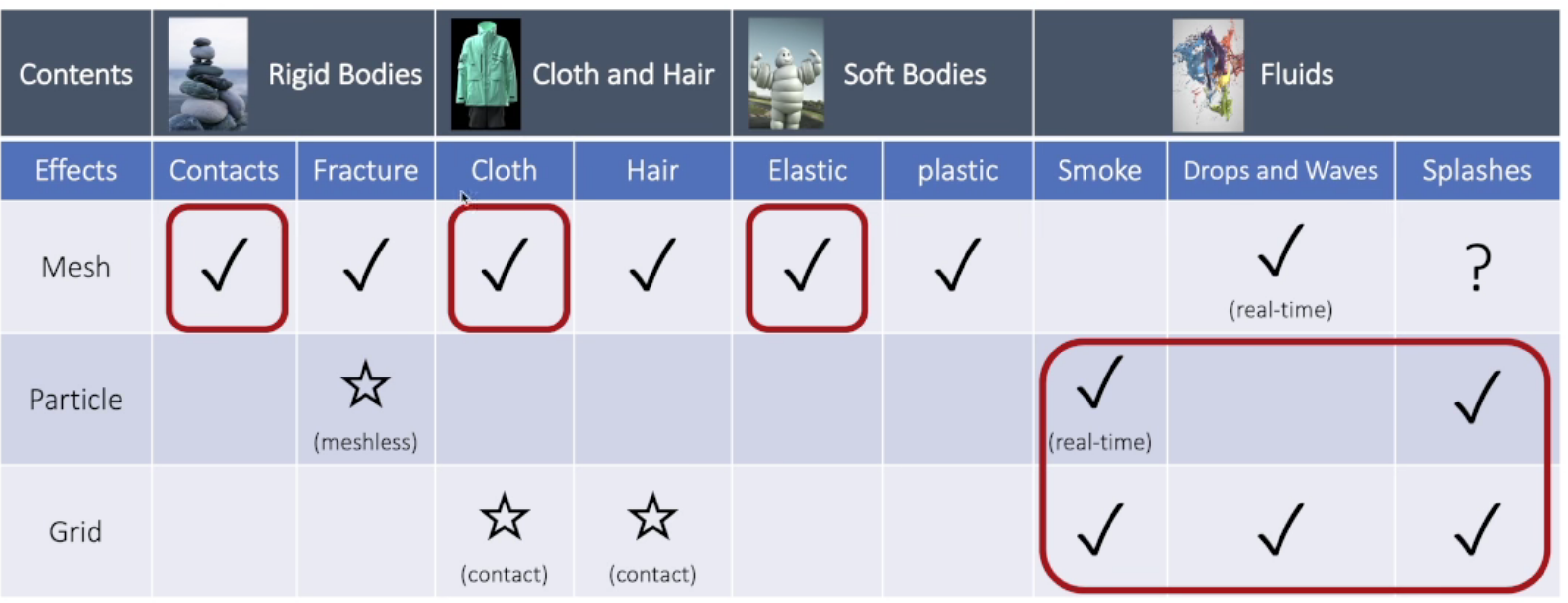
四大类:Rigid Bodies、Cloth and Hair、Soft Bodies、Fluids
同样由于 Geometry 有三种表达方式,所以这里的模拟也有三种方式:
mesh在处理形态比较固定的东西上是有很大的好处的,所以很多都是mesh做的。比如刚体、衣服、弹性体都是以mesh为主的。当然也有人研究用别的方式去模拟。
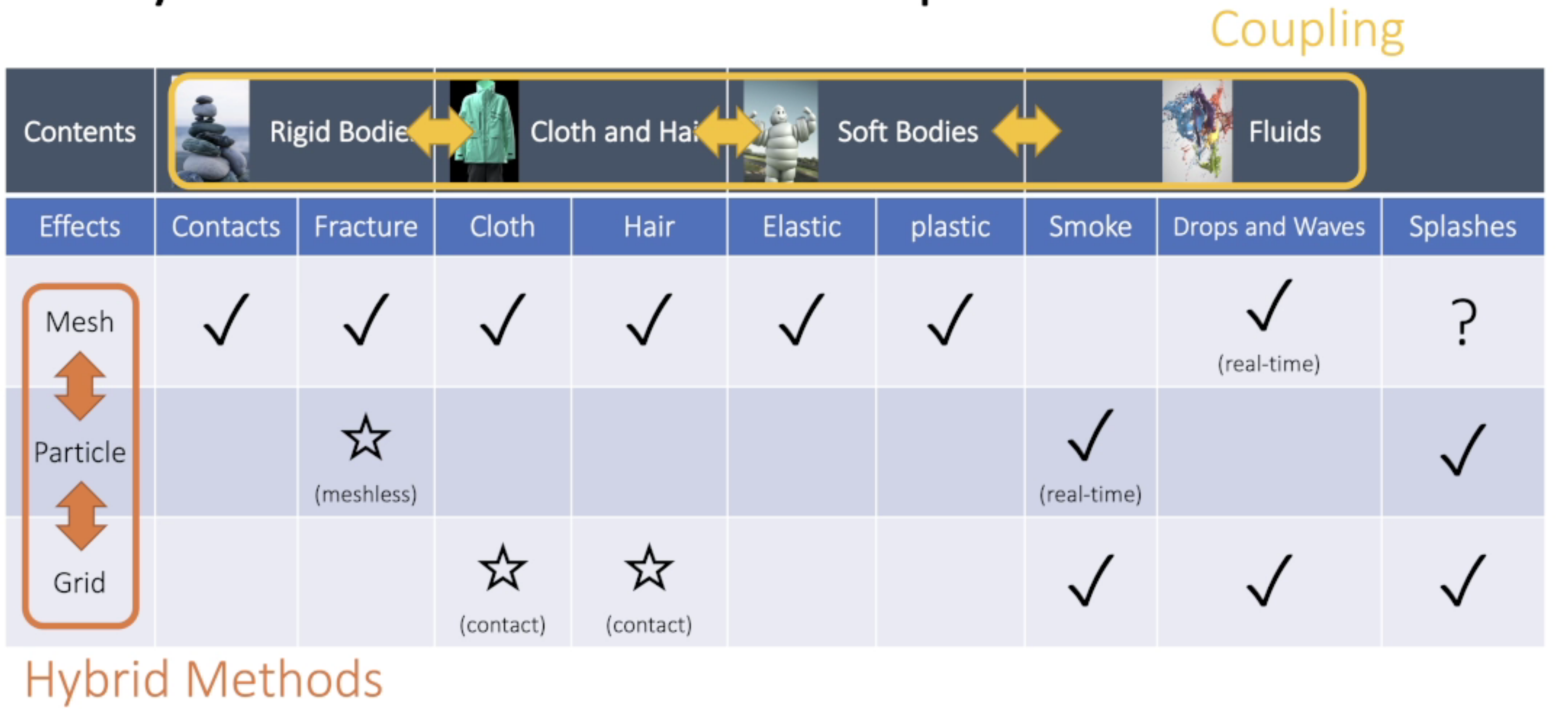
以上仍然有一些未涉及的,比如说:
-
Coupling结合、连接,一个场景既有流体又有刚体又有弹性体等,怎样去模拟它们之间的交互。比如水落在衣服上之类的。
-
hybrid混合,比如雪、各种粘滞的物体,最大的特点就是既有particle的属性也有grid的属性,所以说用hybrid的方法是最常见最通用的。
这节课涉及到的内容:
任何有形变的都可以视为一个软体。无形变的视为刚体。真正的形变有三个阶段:弹性形变、塑性形变、破碎的形变。
老师的经验面板:

2. Math Background: Vector, Matrix and Tensor Calculus
该节主要为复习和物理模拟相关的数学知识。我之前的笔记:https://zhuanlan.zhihu.com/p/413224014
大多数都非常基础,这里记录几个稍微特别的:
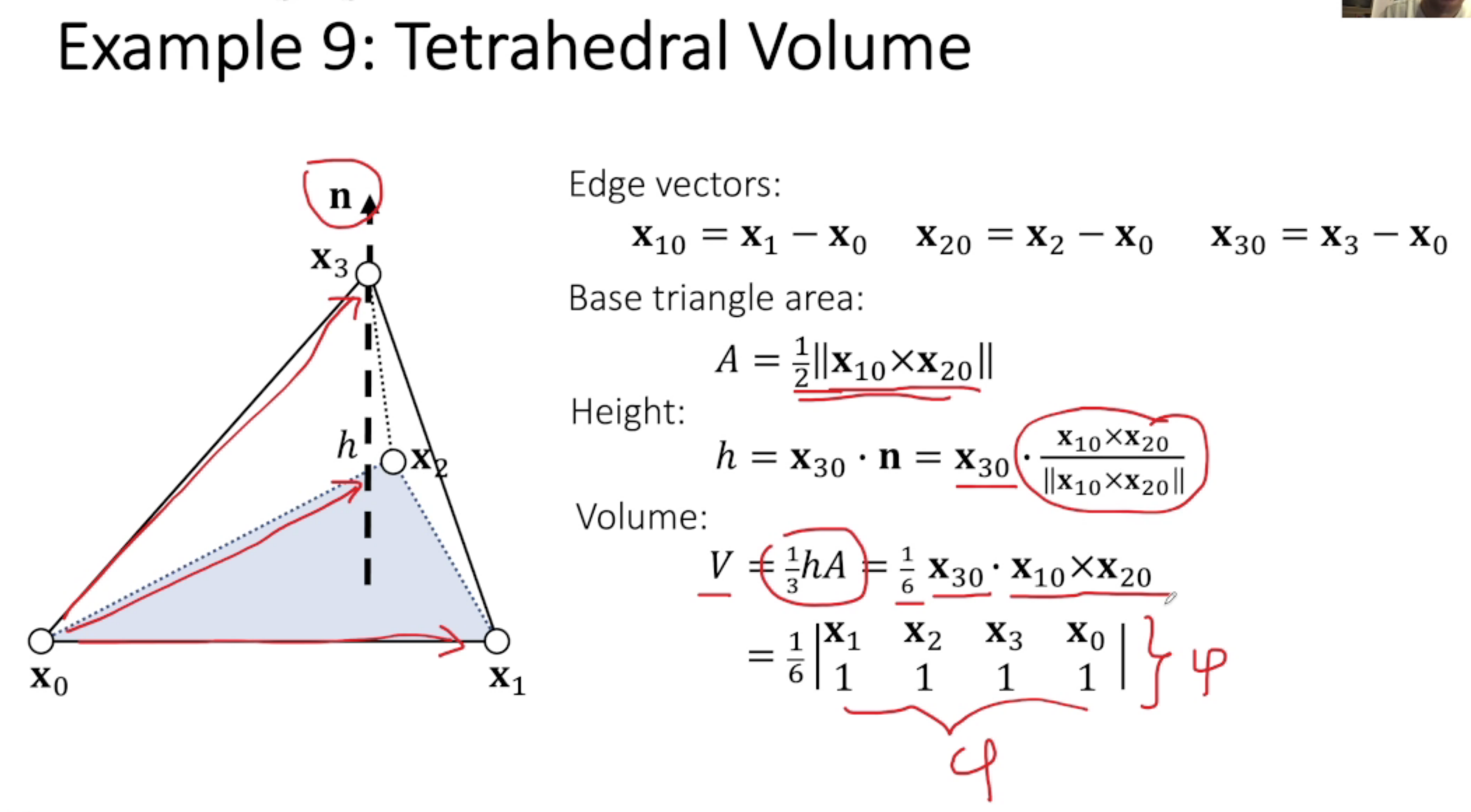
叉乘应用:
计算四面体体积,最底下是 4 * 4 行列式:
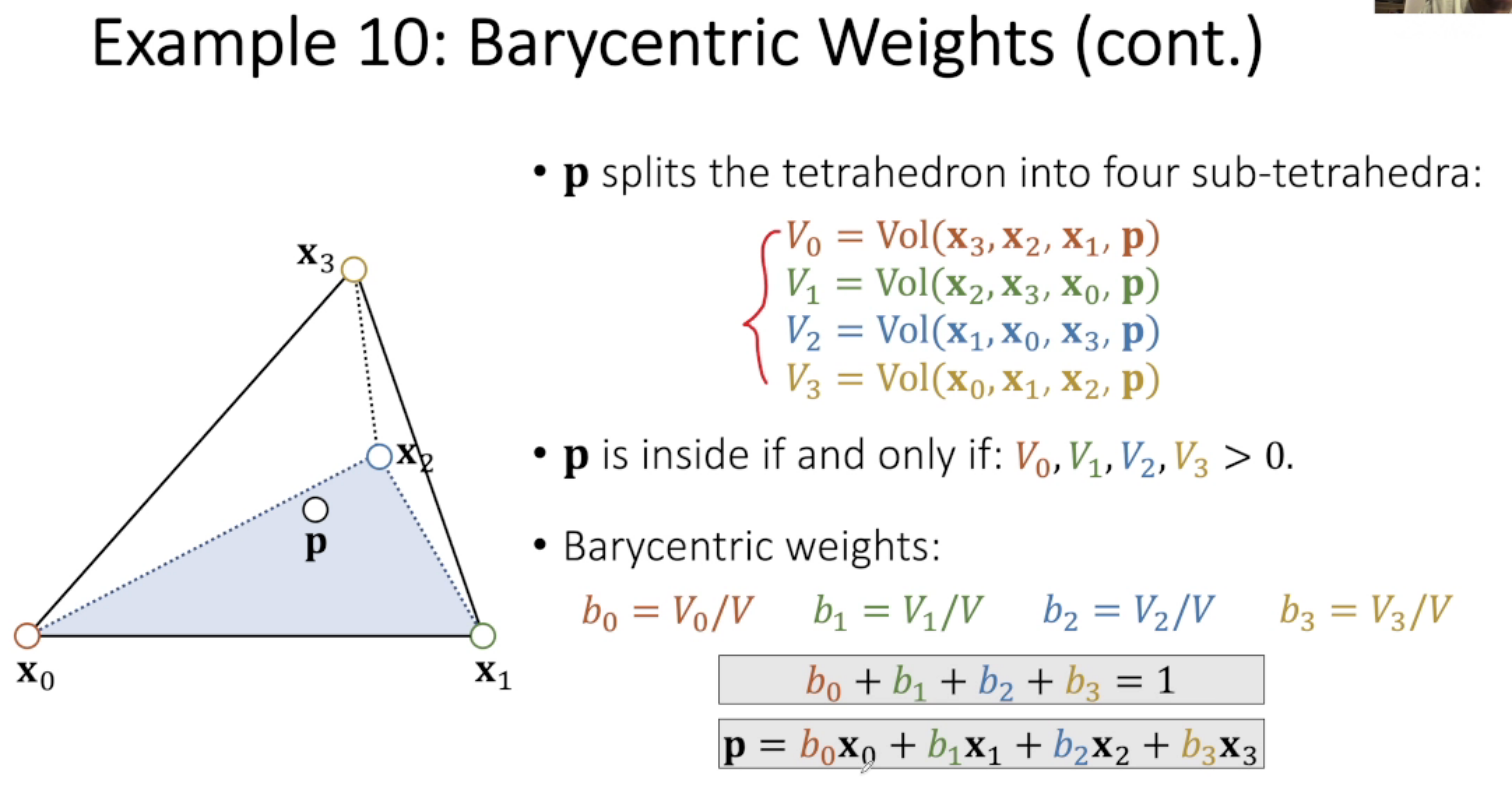
四面体重心坐标(通过刚刚的公式得到四个子四面体的体积):
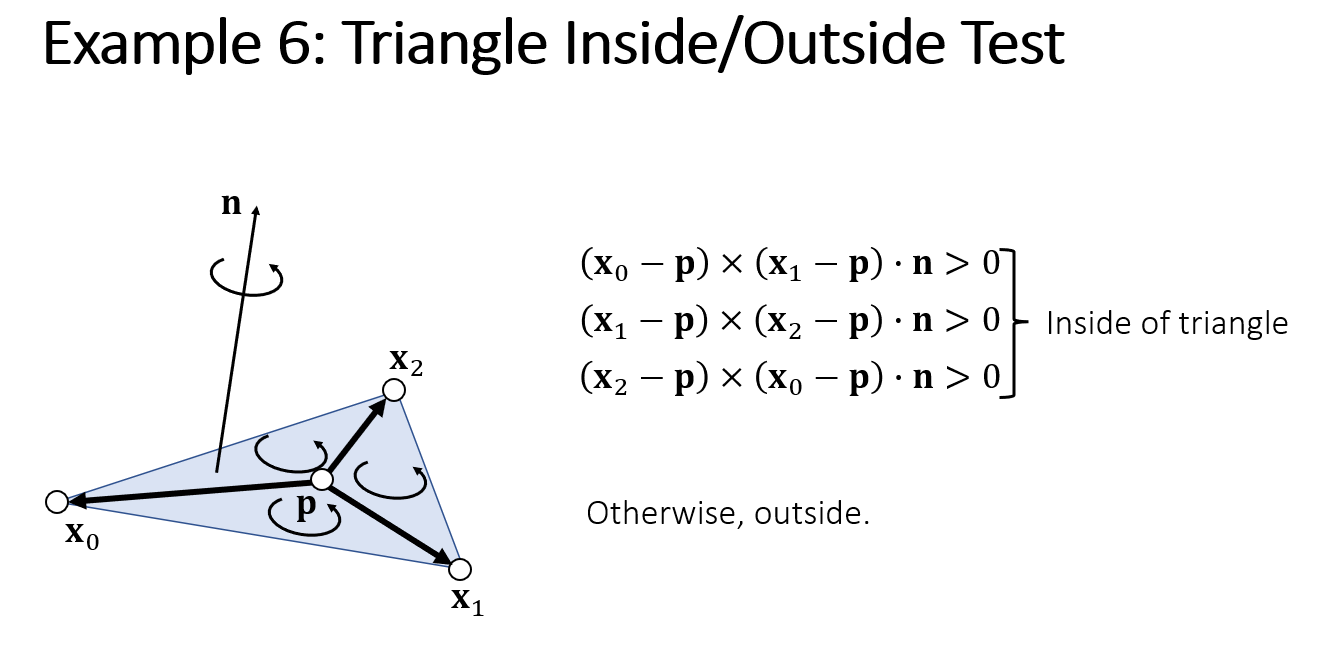
同样还能用于找交点,当然只是一种解释方式罢了(这里解释为交点和三角形组成的四面体的体积应该为0,然后用刚刚说的四面体体积公式),其实很显然:
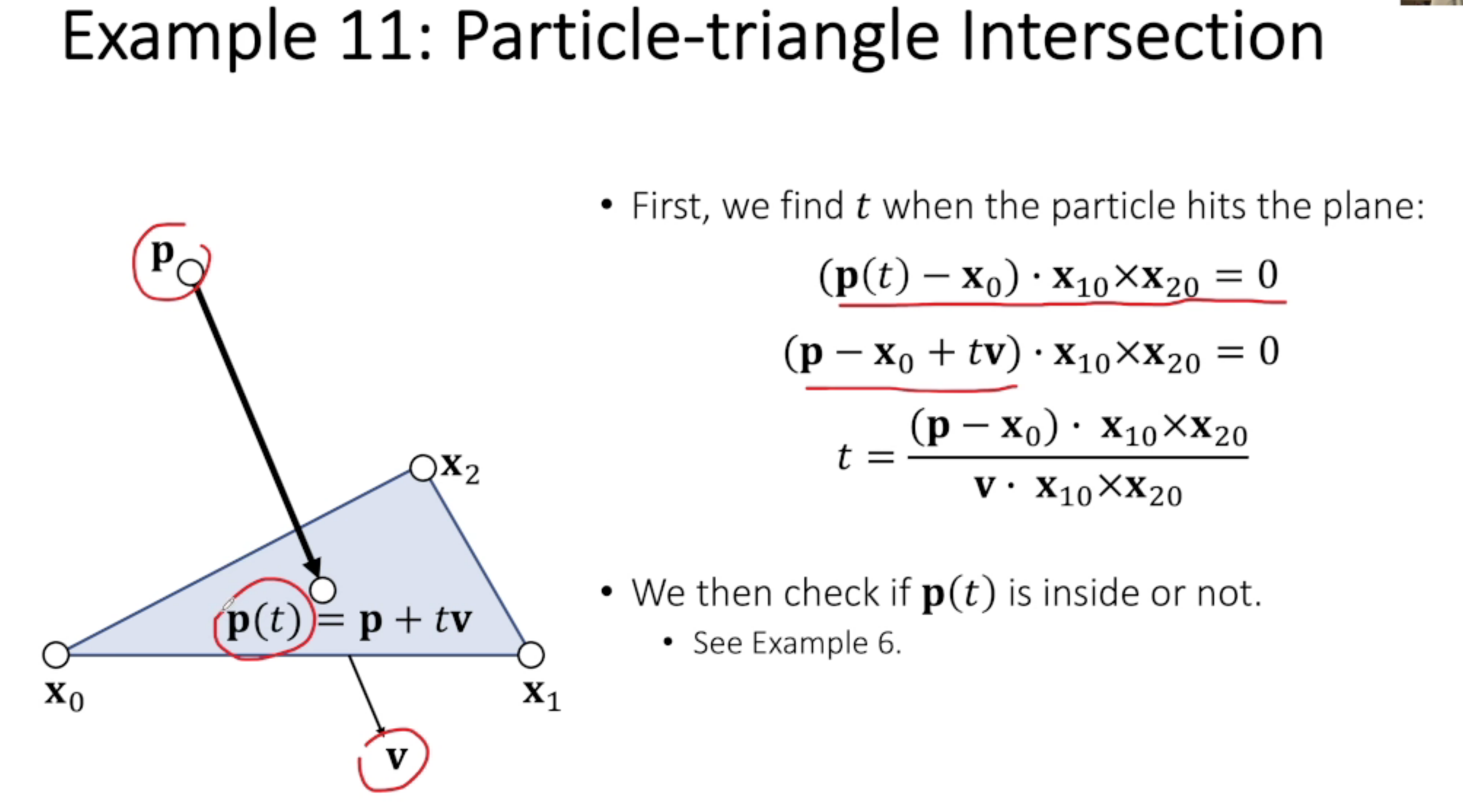
例子6就是用叉乘判断点在不在三角形里头,常规操作:
矩阵:
首先是奇异值分解(SVD):
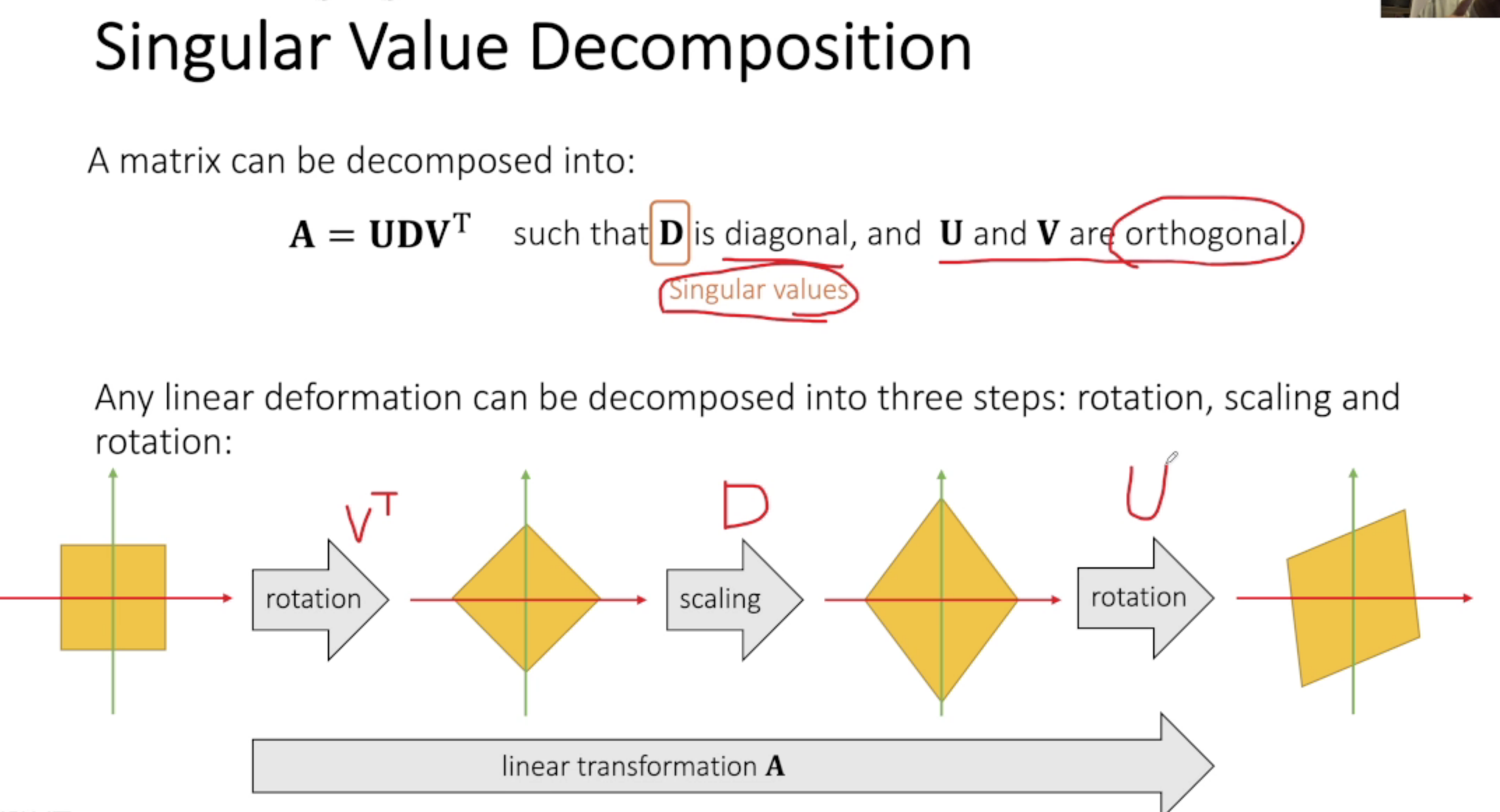
我们熟知旋转矩阵是正交阵,转置即为逆,这里老师给出了一个很有意思的见解:任何一个线性变换,都可以分解为 旋转=》缩放=》再旋转,之所以搞了两个旋转是因为,缩放只能沿着坐标轴缩放,所以要先旋转来调整位姿,缩放完之后再旋转,其核心是缩放。
图中为二维的例子,但实际上三维也是一样的道理。
为什么说这个解读很有趣呢,因为我从没见过,老师解释的非常好。
正统SVD的描述是:
假设M是一个m×n阶矩阵,其中的元素全部属于域 K,也就是实数域或复数域。如此则存在一个分解使得
其中U是m×m阶酉矩阵;Σ是半正定m×n阶对角矩阵;而V*,即V的共轭转置,是n×n阶酉矩阵。这样的分解就称作M的奇异值分解。Σ对角线上的元素Σi,其中Σi即为M的奇异值。

实际上M未必是方阵,而U和V为酉矩阵(自然便是方阵),并且还可以是复数域(所以扩充出了酉矩阵这样的概念),只不过搬到图形学我们都注重三维(或二维)的实数域了。
特征值分解:
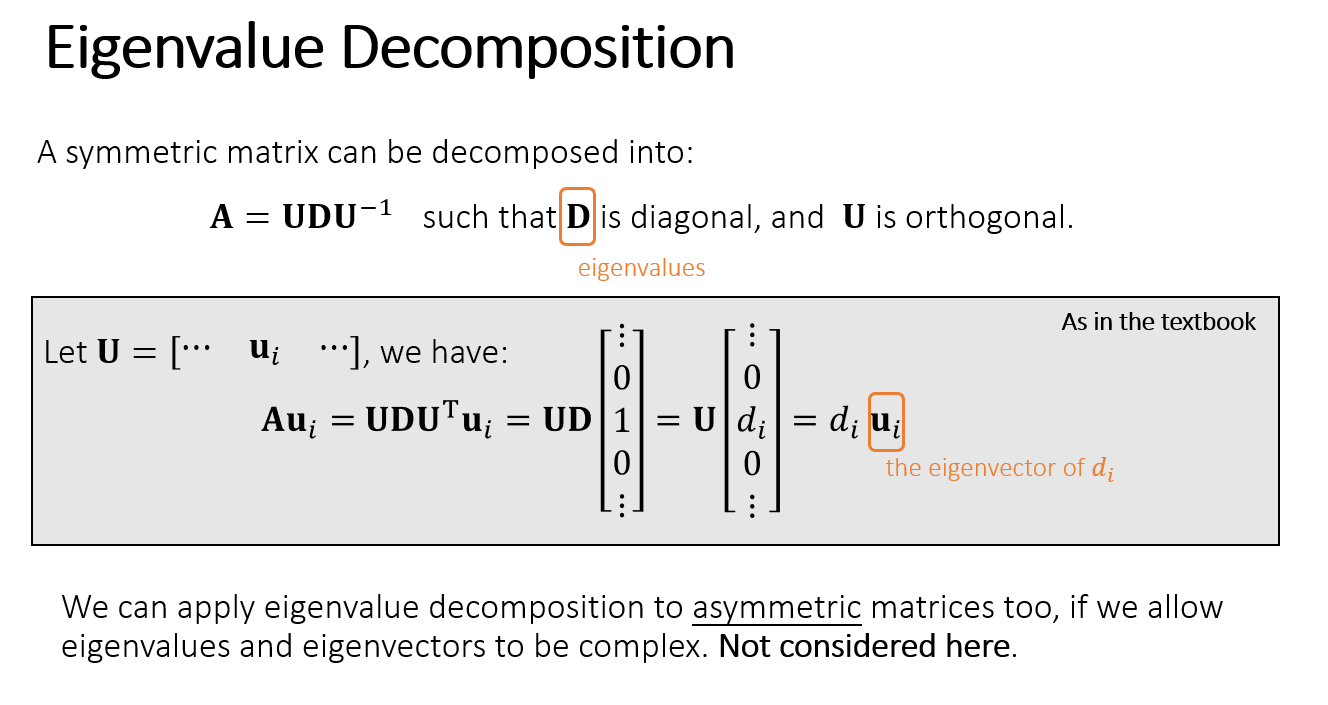
我接着进行补充,这里老师只考虑对称矩阵,实际上上面分解是因为:任何一个实对称矩阵都相似于一个对角阵。因此可以有上面的分解。至于相似矩阵就自行看百度百科了,我放个链接:https://baike.baidu.com/item/%E7%9B%B8%E4%BC%BC%E7%9F%A9%E9%98%B5/10369874?fr=aladdin
对称正定/半正定:
百度百科:https://baike.baidu.com/item/%E6%AD%A3%E5%AE%9A%E7%9F%A9%E9%98%B5
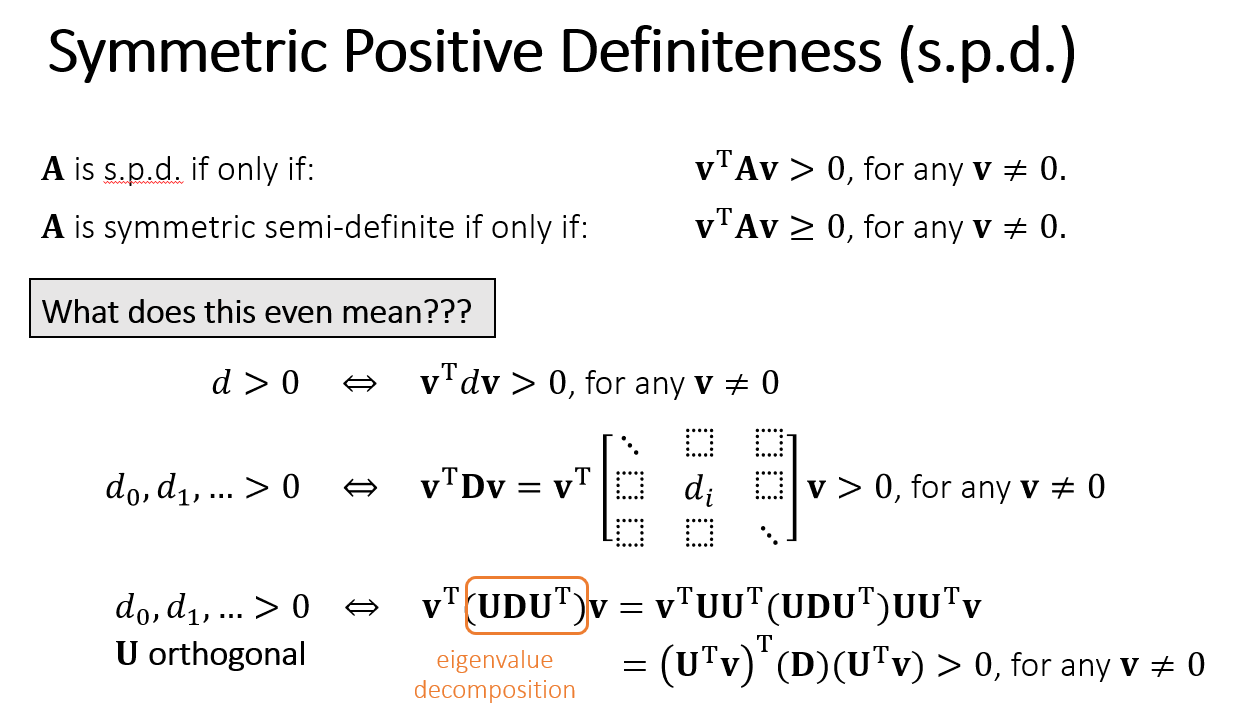
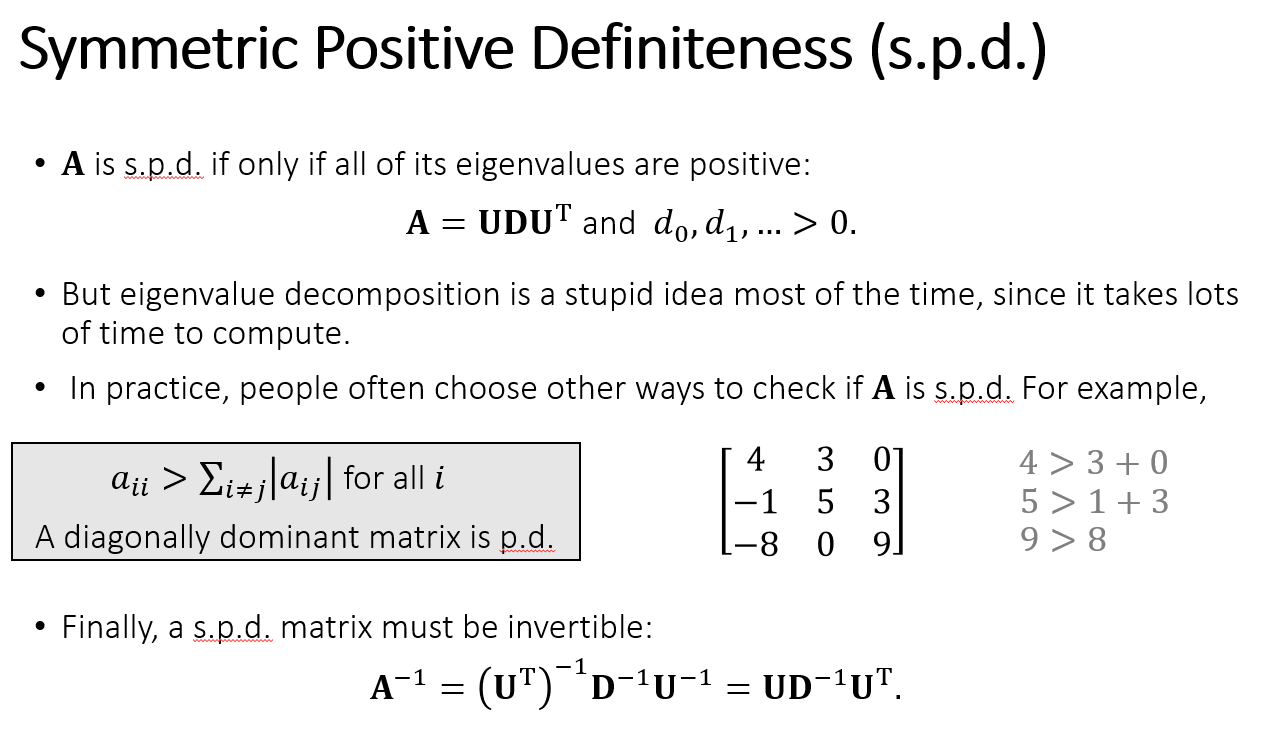
上图这里给了一个结论:如果一个矩阵是对角占优的,那么它就是正定的。
并且一个spd矩阵(对称正定矩阵)一定是可逆的。
接着补充:
一般我们学数学的时候,判断一个矩阵是不是正定的其实常通过看顺序主子式。一个n阶实对称矩阵是正定的当且仅当它的一切顺序主子式均为正。有了这一条,那么自然它就是可逆的(本身的行列式就是最大的主子式,为正,那么自然可逆)。
求解线性问题:
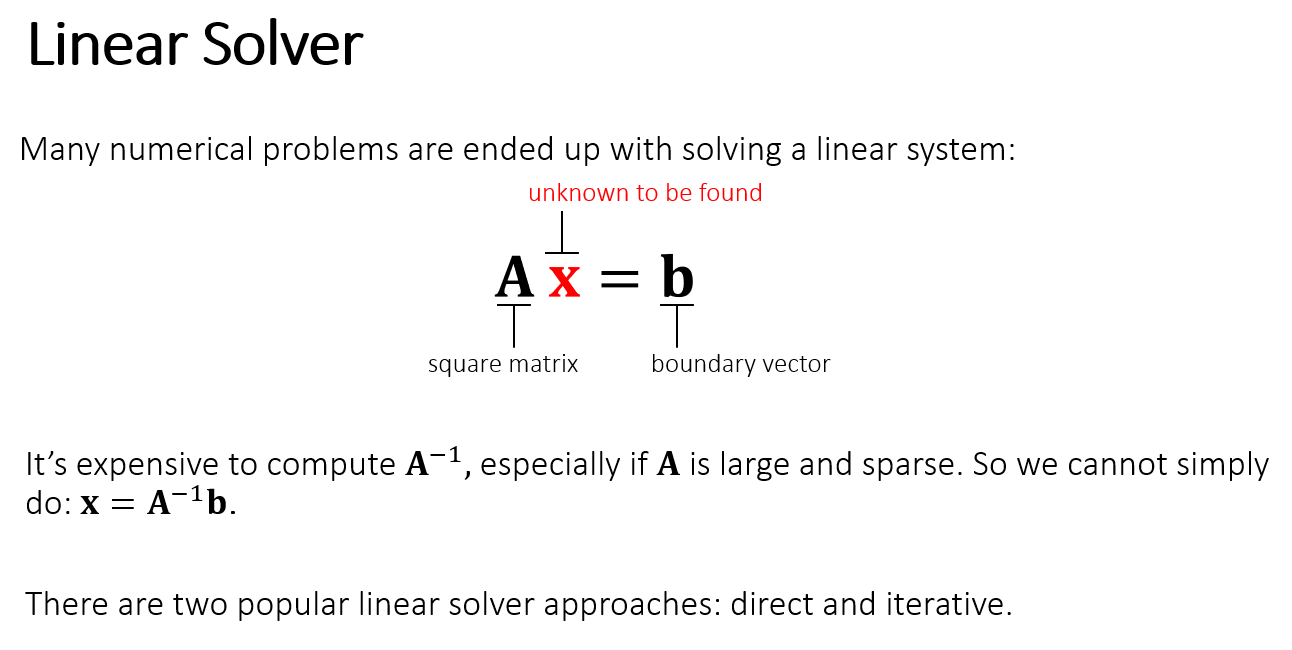
两种方法:直接法和迭代法。
-
直接法:
主要是通过LU分解。这样我们就可以分两步去求解。
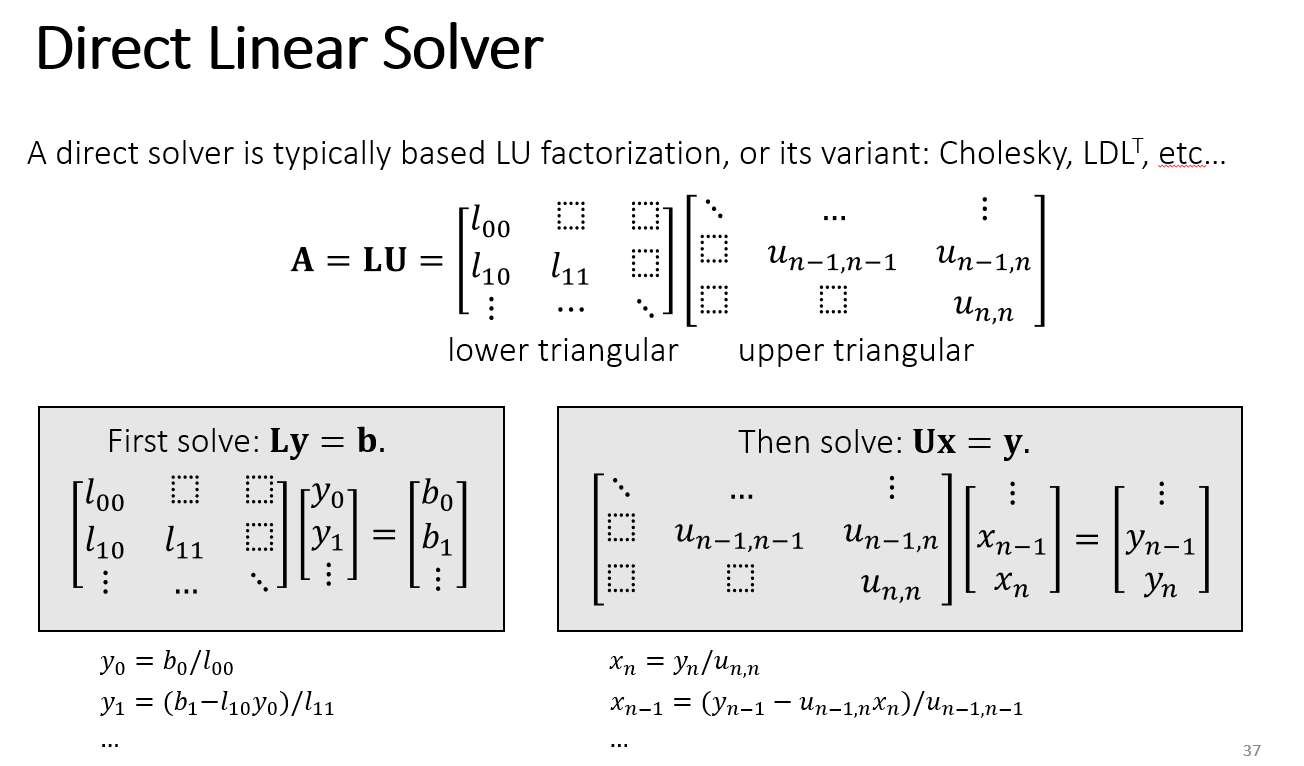
特点:
如果A是稀疏的,L和U也未必稀疏。我们希望L和U稀疏来减少存储空间,于是可以通过调整顺序(permutation)来做到。
计算实际上是由两部分构成:LU分解 和 之后的求解。目前而言两部分可以分开来计算,好处是如果矩阵A是固定的,那么可以让分解只做一次,而让求解做多次。 -
迭代法:
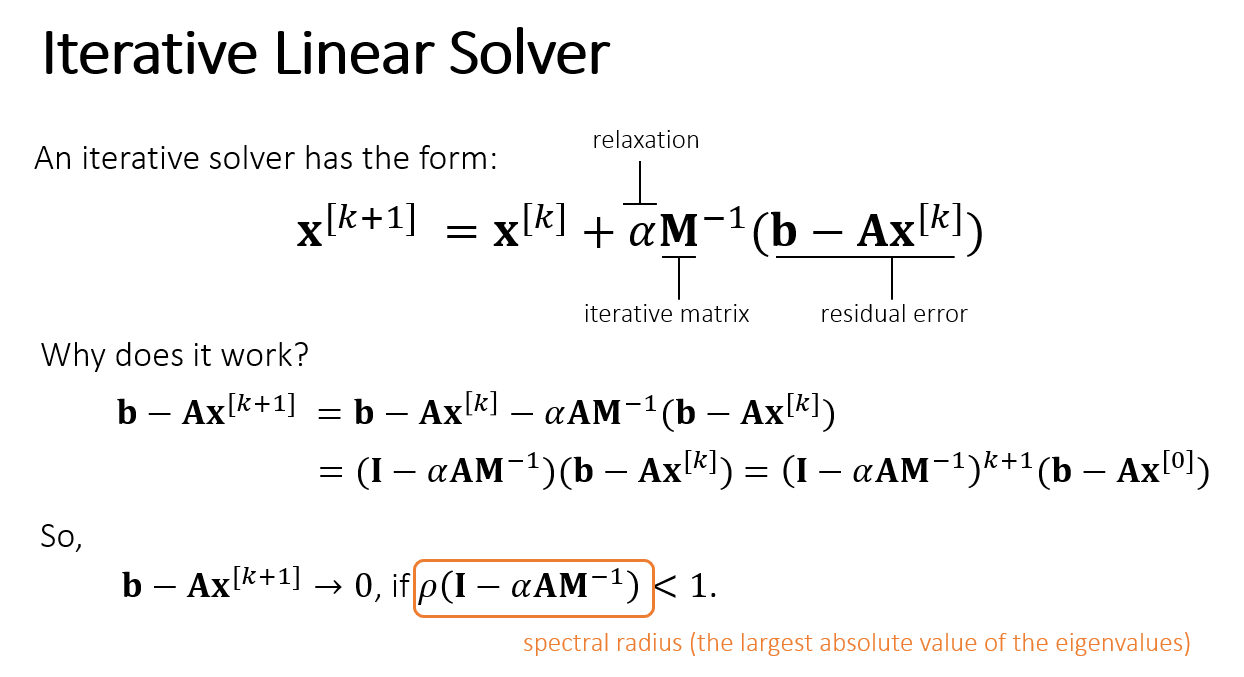
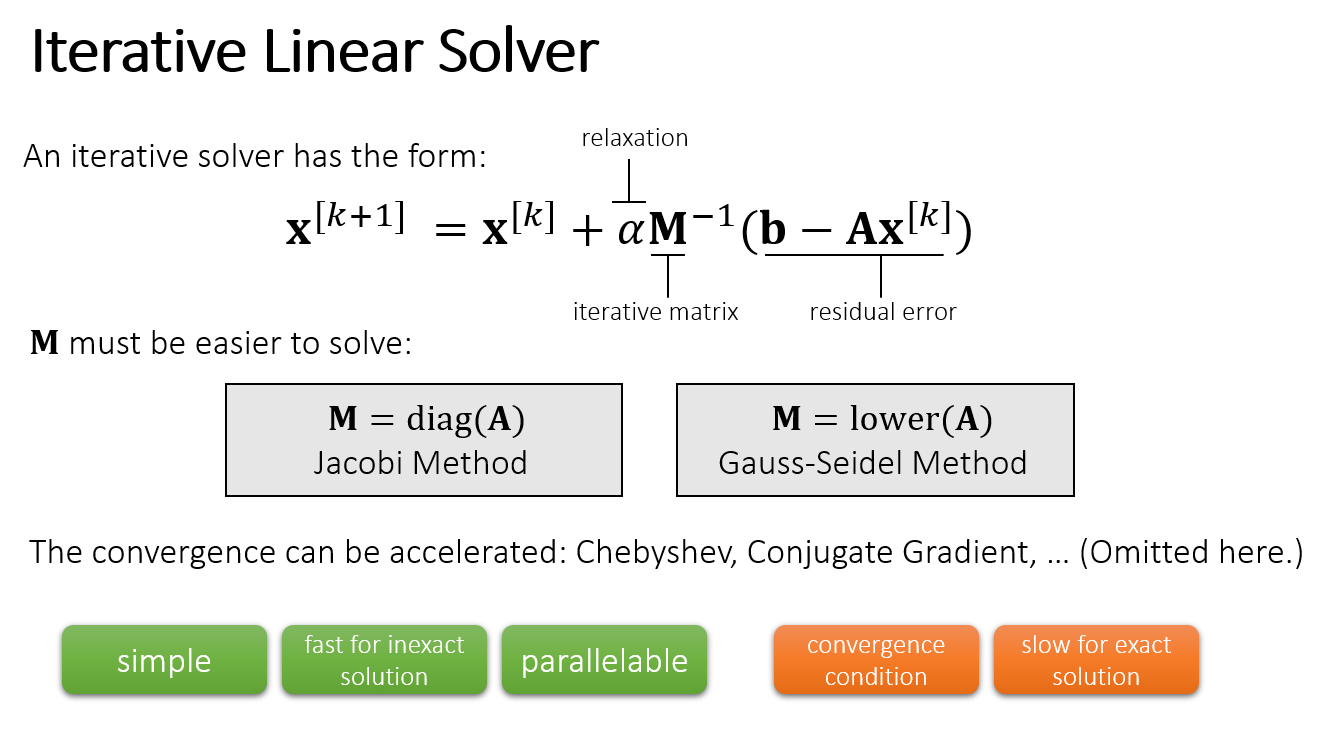
迭代法实现起来较方便,且不要求精确解的情况下比较有效。并且相对容易并行。
缺点是有一些条件,比如上上张图的最底下,要求spectral radius谱半径要小于1才能收敛,同时要求精确解的话会很慢。
Tensor Calculus:
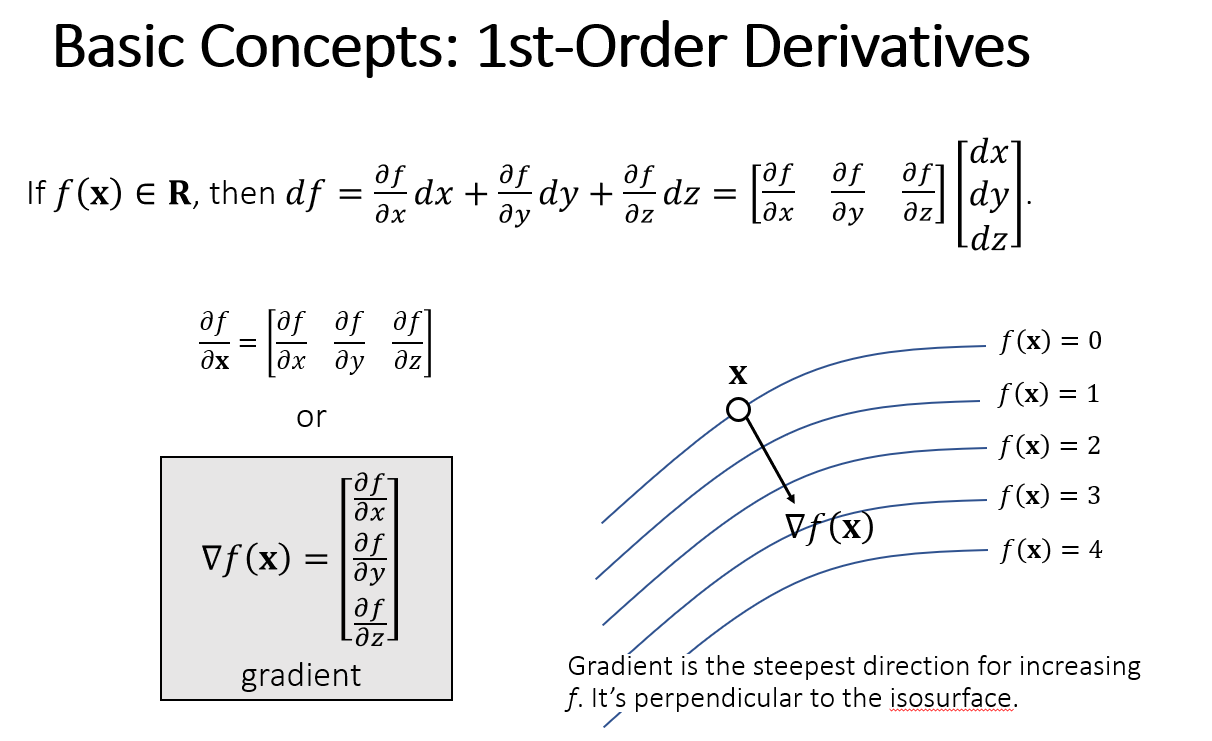
梯度的本意是一个向量(矢量),表示某一函数在该点处的方向导数沿着该方向取得最大值,即函数在该点处沿着该方向(此梯度的方向)变化最快,变化率最大(为该梯度的模)。
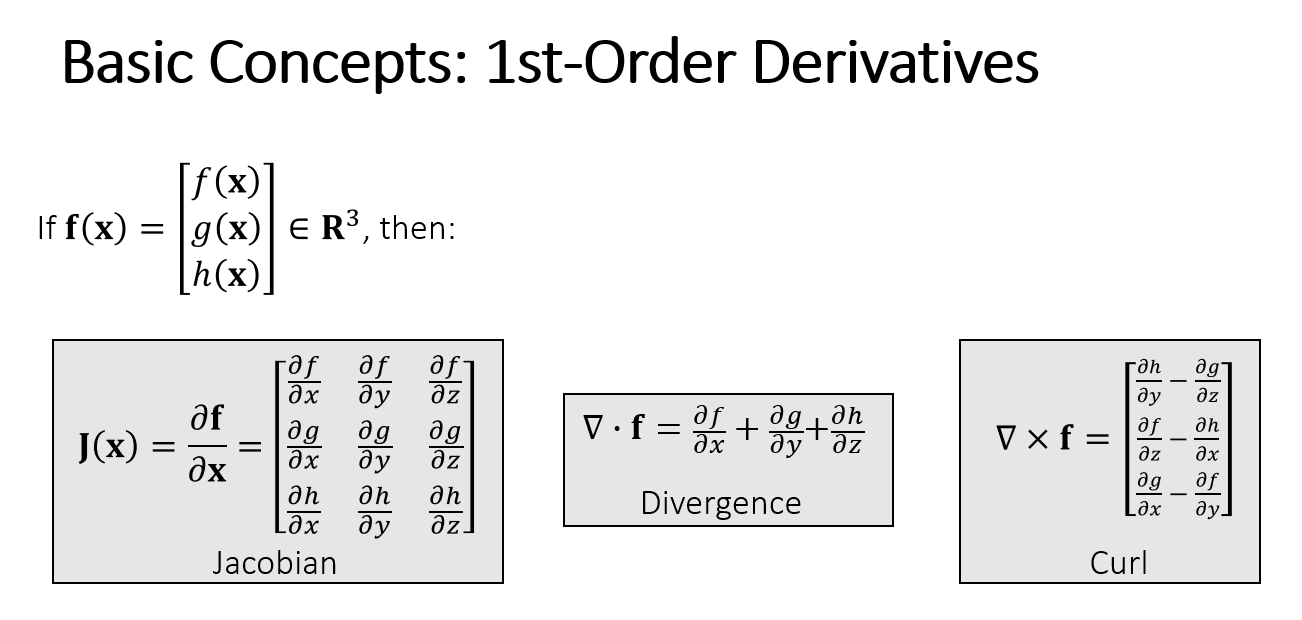
散度(divergence):https://baike.baidu.com/item/%E6%95%A3%E5%BA%A6/8281793?fr=aladdin
旋度(Curl):https://baike.baidu.com/item/%E6%97%8B%E5%BA%A6/8106439?fr=aladdin
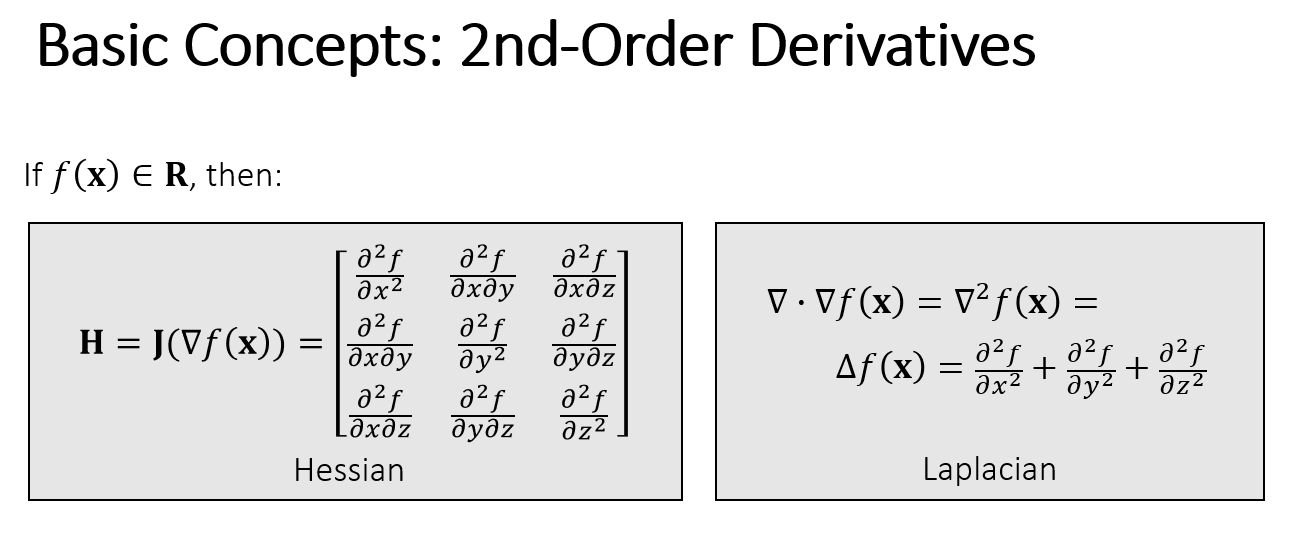
Hessian对称阵,Laplacian就是其对角。
泰勒展开:
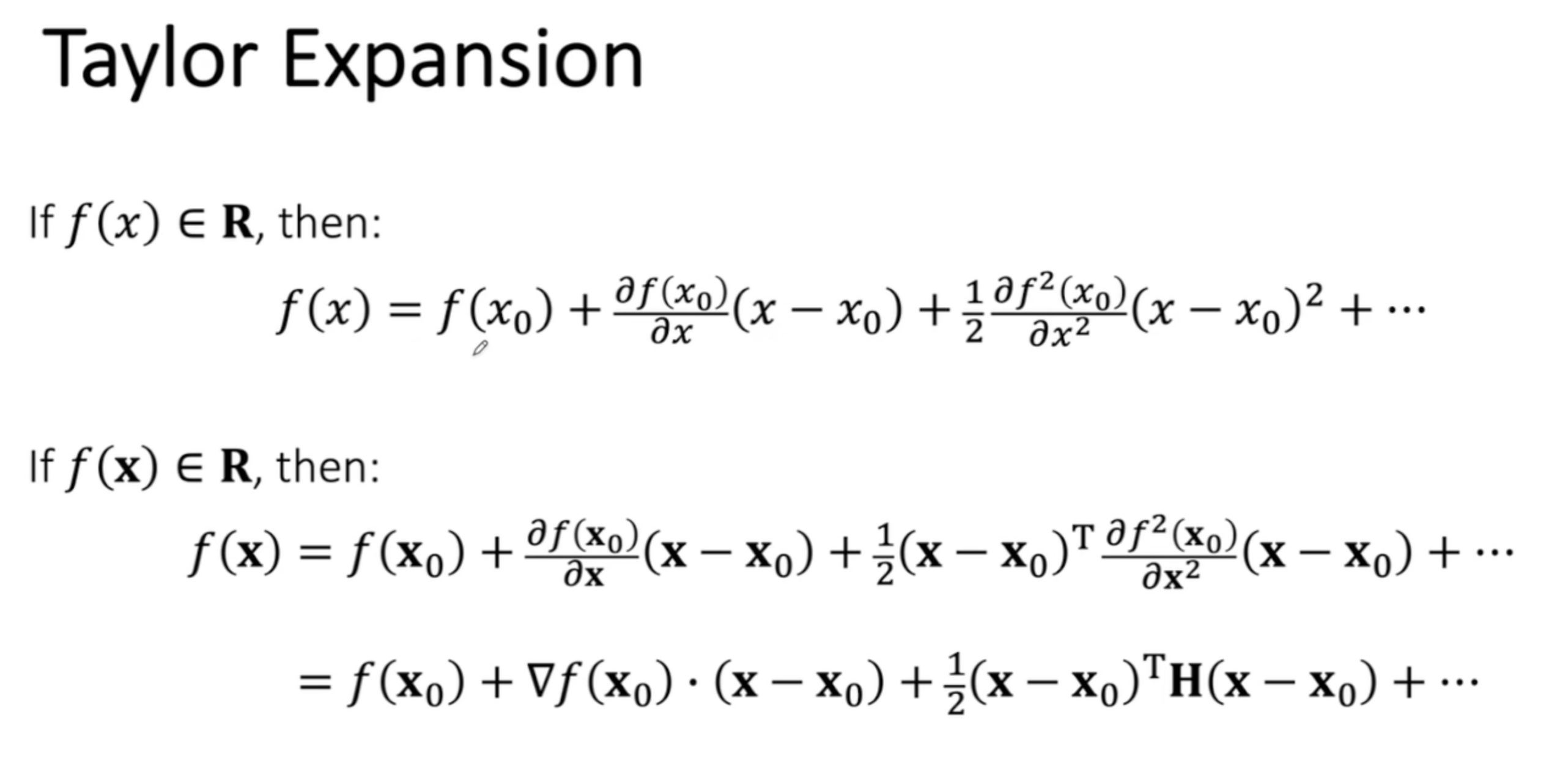
粗体的x表示向量。下面的公式即对向量形式的函数做泰勒展开。
可以看到,如果这个H是正定的,由正定的定义,我们知道二阶项就是大于0的,这会带来一些小特性可以优化,不展开了。
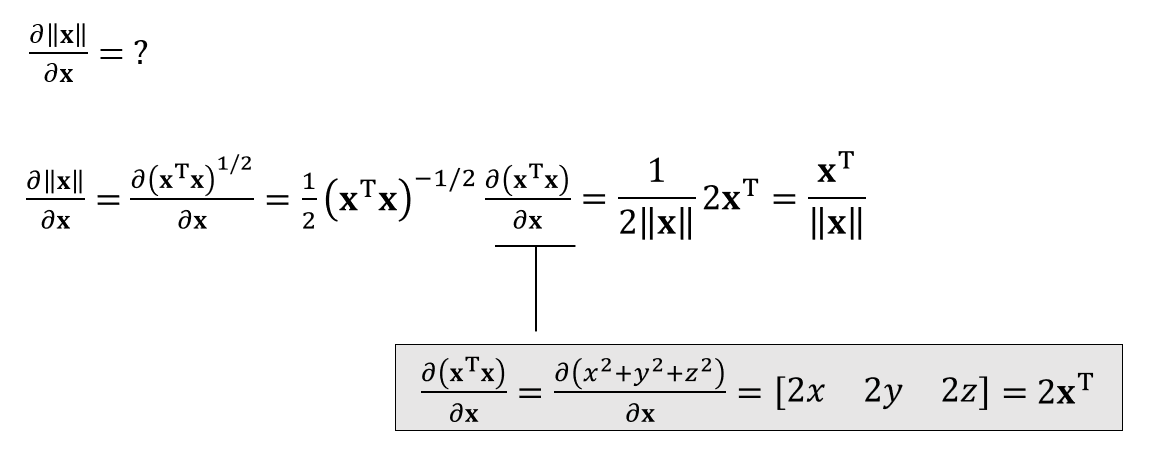
一个小测试(把x的转置乘以x看作一个整体,然后求导运用链式法则):
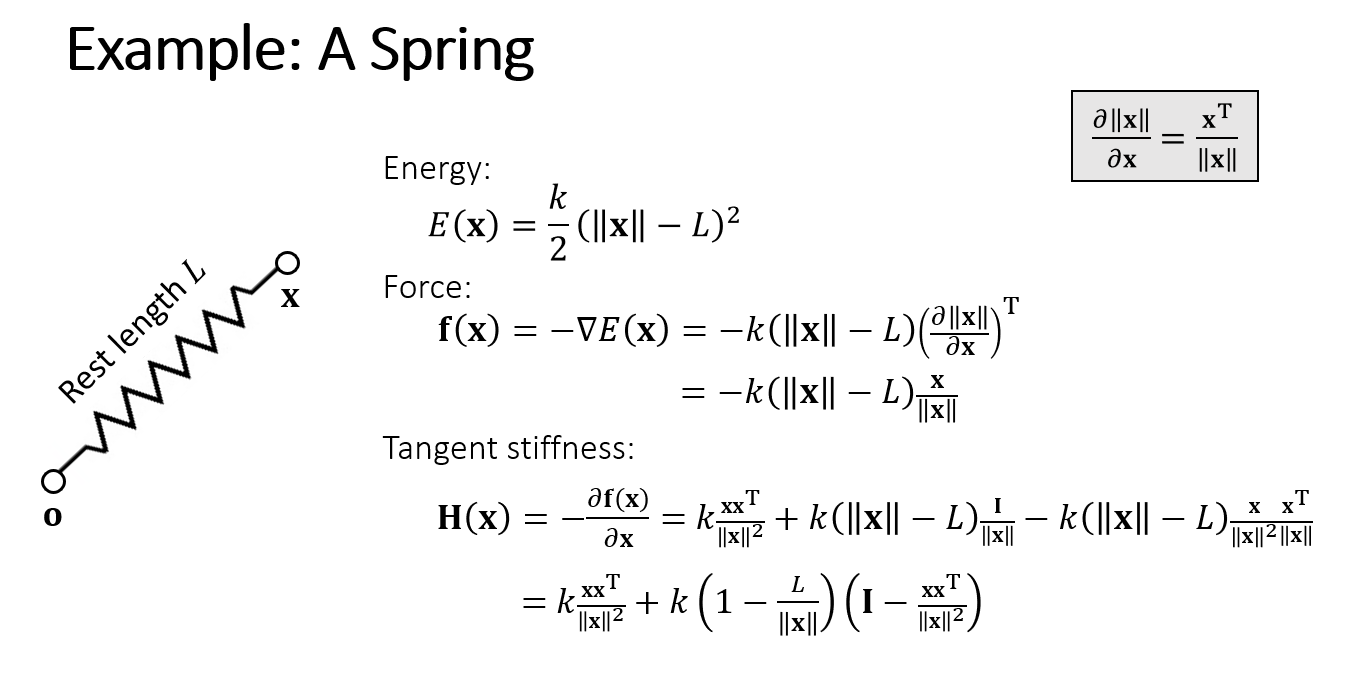
通过这个小结论,我们进一步可以算出一个弹簧的公式:
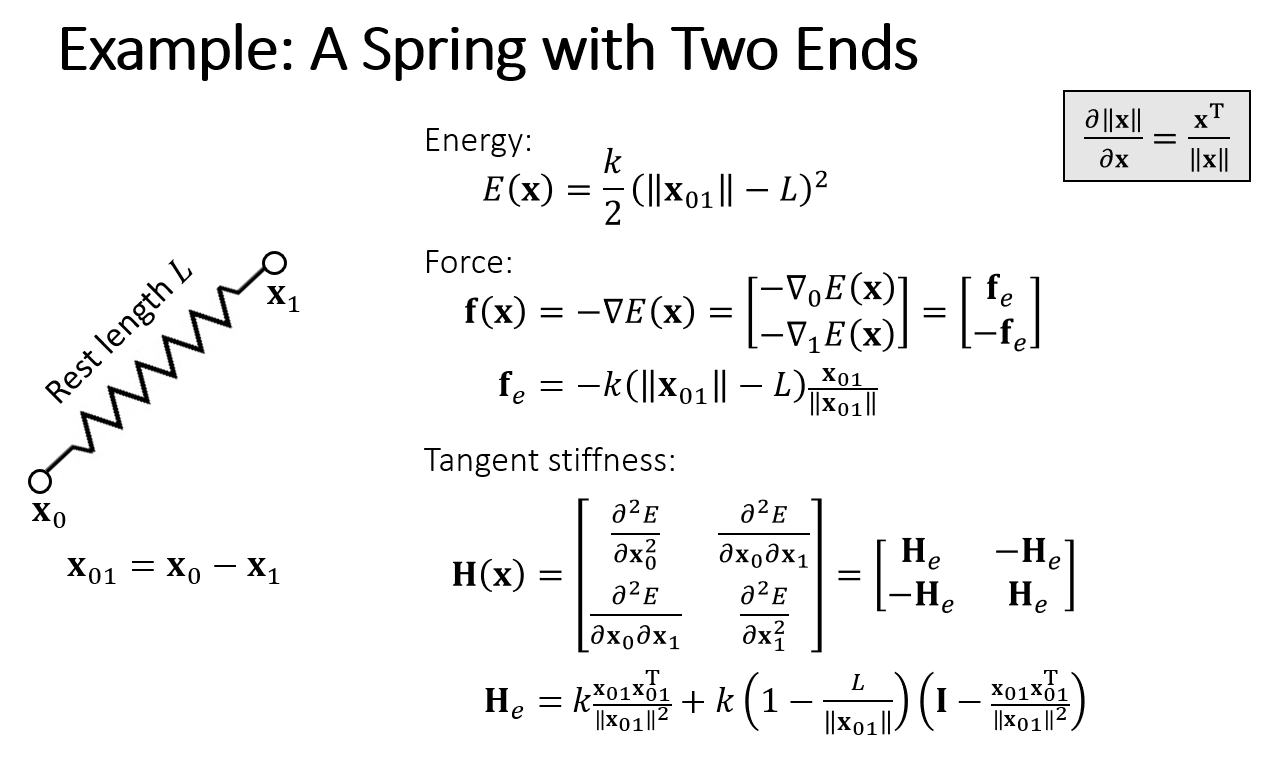
如果是两个点的弹簧,则如下:
3. Rigid Body Dynamics
刚体模拟包括其他模拟,本质上就是去更新描述物体状态的一个变量。
因此引出的问题就是如何定义这个状态。
对于一个刚体,由于其无形变,因此状态包含两部分:平移和旋转。
位置很简单,就是一个三维向量。而知道位置还不够,因为实际情况我们还需要知道位置和时间的关系。因此我们还需要速度(位置对时间的导数)。
因为一个力(f函数)本身可能很复杂,可能是时间、速度、位置等的函数,同时由物理学我们知道,物体所受合外力的冲量就是该物体的动量变化量,冲量即力对时间做积分,动量即质量乘以速度,因此可得如下公式:
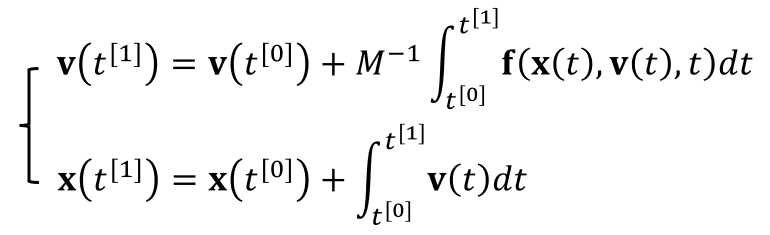
这里的M就是质量了,就是刚刚说的冲量等于动量变化量的等式,把动量中的质量除过去了而已。然后同样有位置,速度对时间的积分,都是基操了。
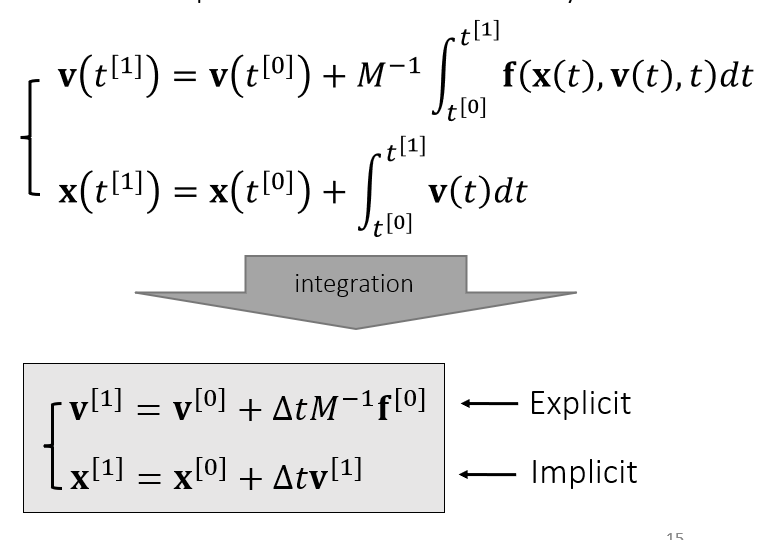
随后老师给出了一些积分手段:
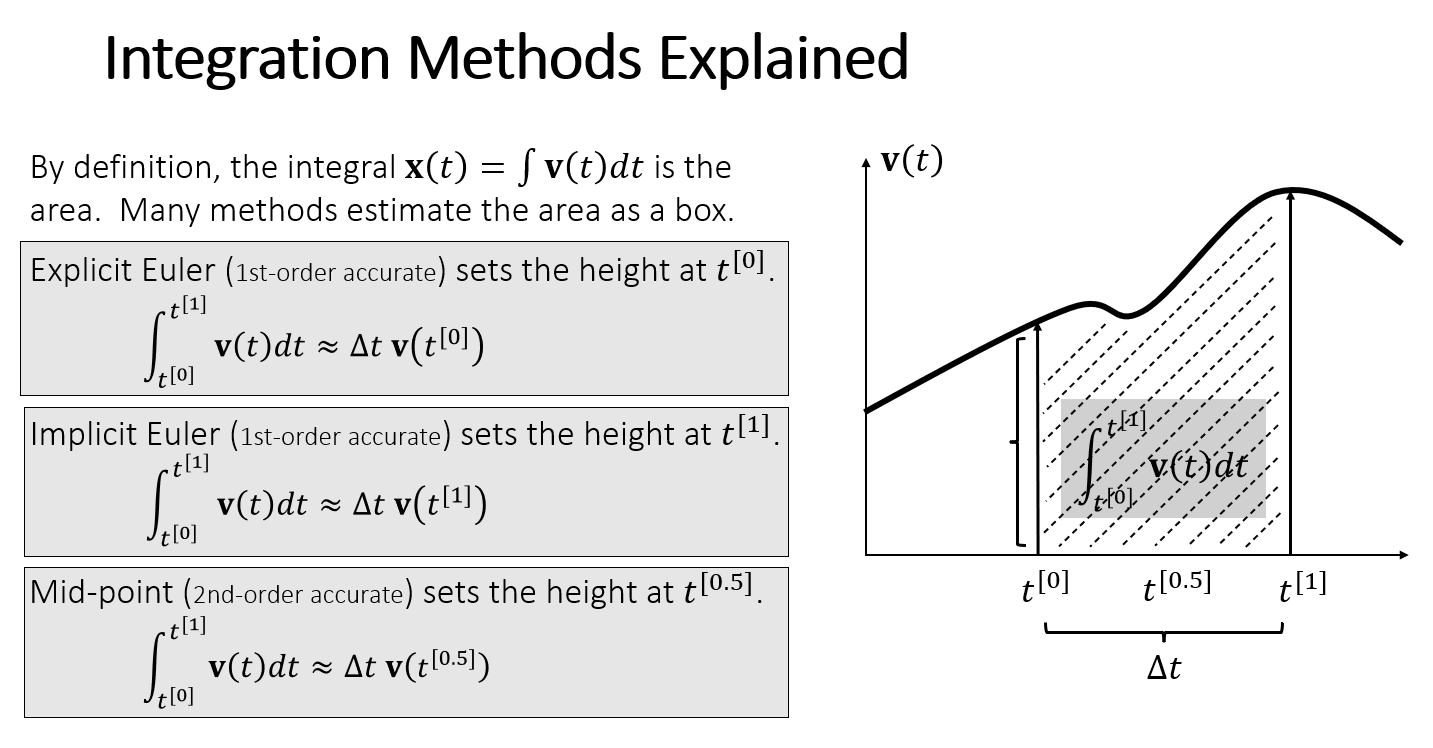
分为了三种:显式、隐式和Mid-point,于是进一步公式积分可以写为:
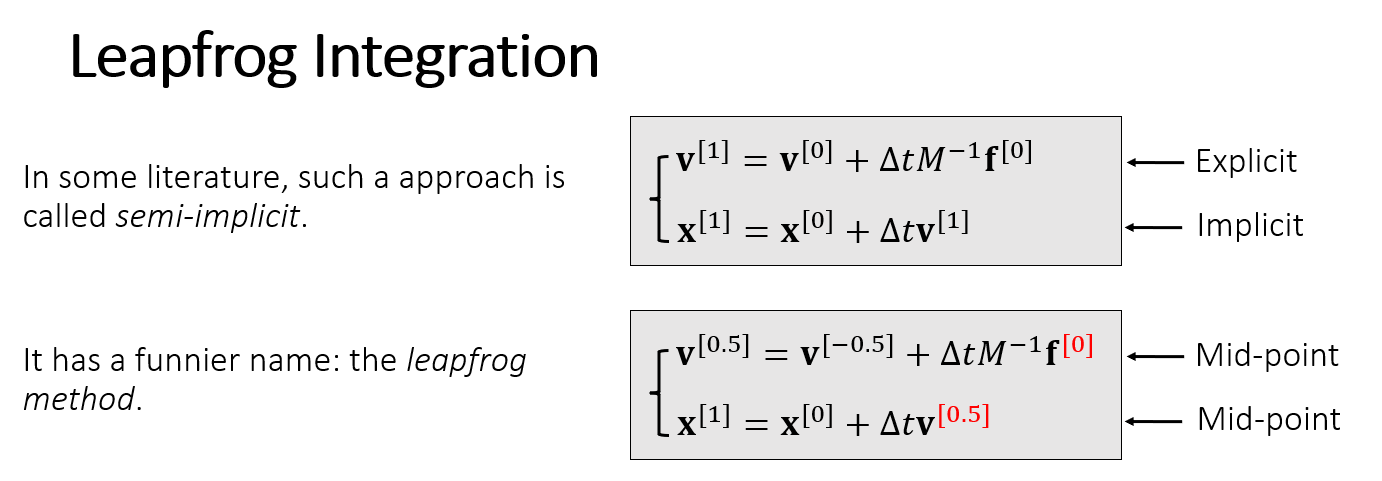
这种结合的方法也叫 semi-implicit 半隐式,也有文献叫做 leapfrog method(像两只青蛙相互跳跃)。
我的补充:
这些都是数值分析的一些常规,进一步还可以了解:牛顿-柯斯特公式、辛普森公式、柯斯特公式、欧拉法(欧拉公式)、龙格-库塔法(R-K法)
力有重力、阻力,如下:
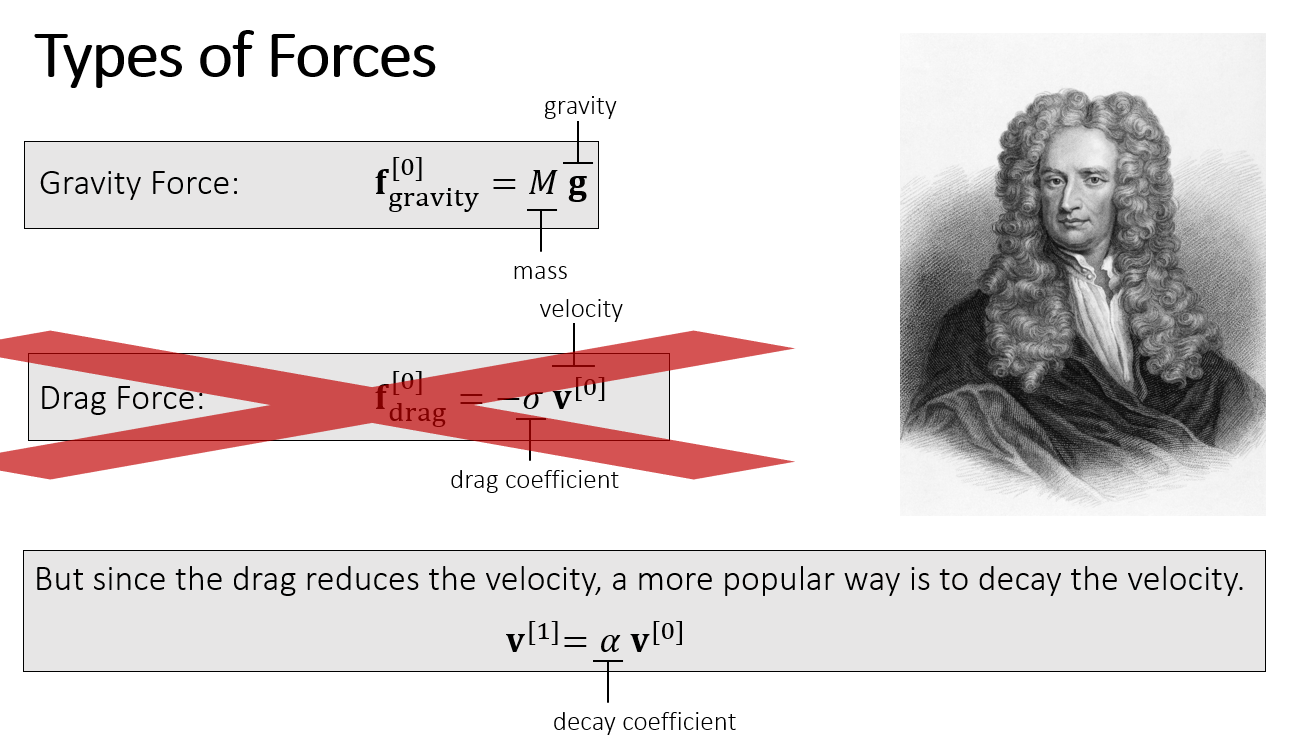
简单来做直接把速度搞成一个衰减的形式来模拟阻力,比较推荐。但不排除有paper用更精确的计算。
有了上面的基础就可以进行状态模拟了,如下:
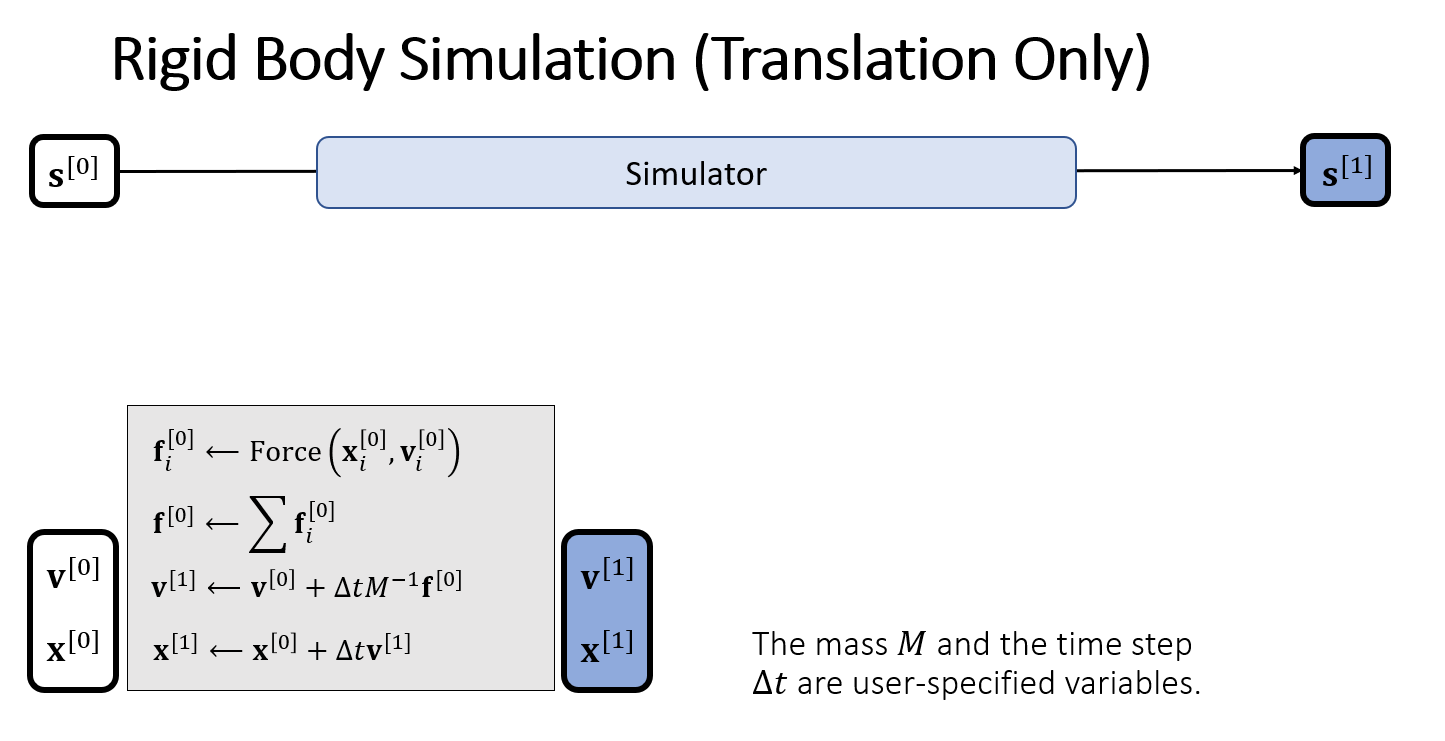
物理学中质量的英文为mass,我们简单来做就直接把质量和时间步长自己定义(作业里就手动改了尝试一下)。但是可能游戏里 Δt 要和帧率相关。
接下来再谈旋转,我们熟知可以用矩阵来表示,但他也有缺陷:有9个变量却只有3个自由度(有很大的冗余性,即不是所有的矩阵都是旋转矩阵)、很不直观(不能一眼看出如何旋转)、时间微分不容易求(即不容易求旋转速度角速度)。
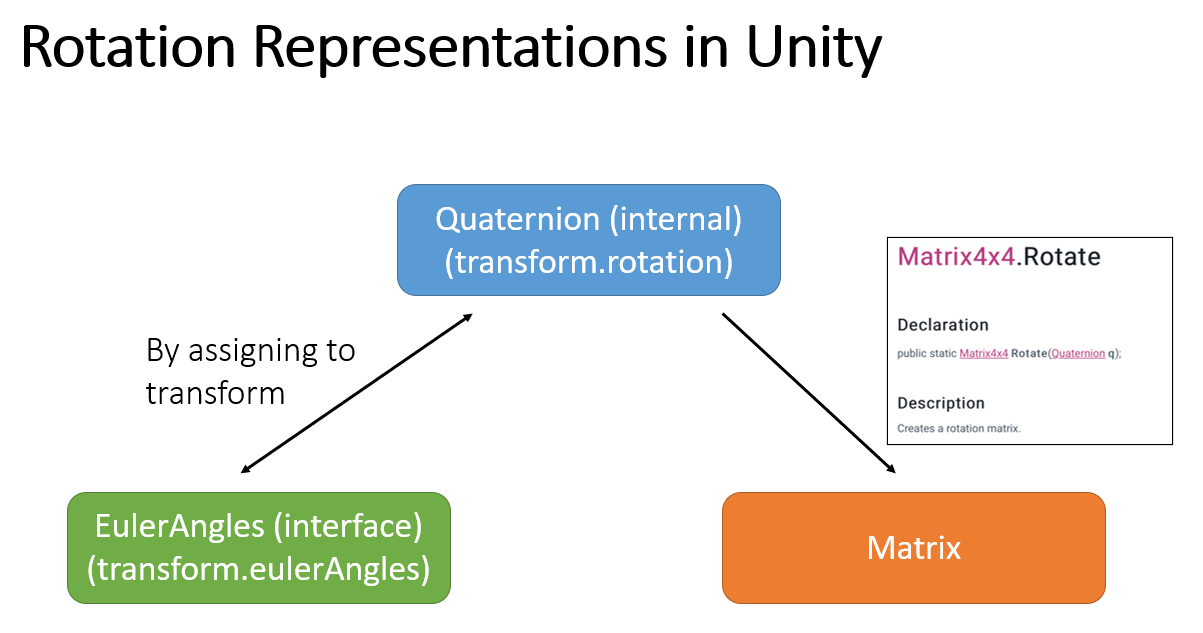
而像unity的rotation中的x、y、z就是用欧拉角去做的,unity顺序为z-x-y。不过拿欧拉角来模拟也有问题,其一是万向节死锁(gimbal lock),其二是也不好描述时间导数(毕竟有三个旋转,还彼此相关)。推荐我的笔记:https://zhuanlan.zhihu.com/p/413224014
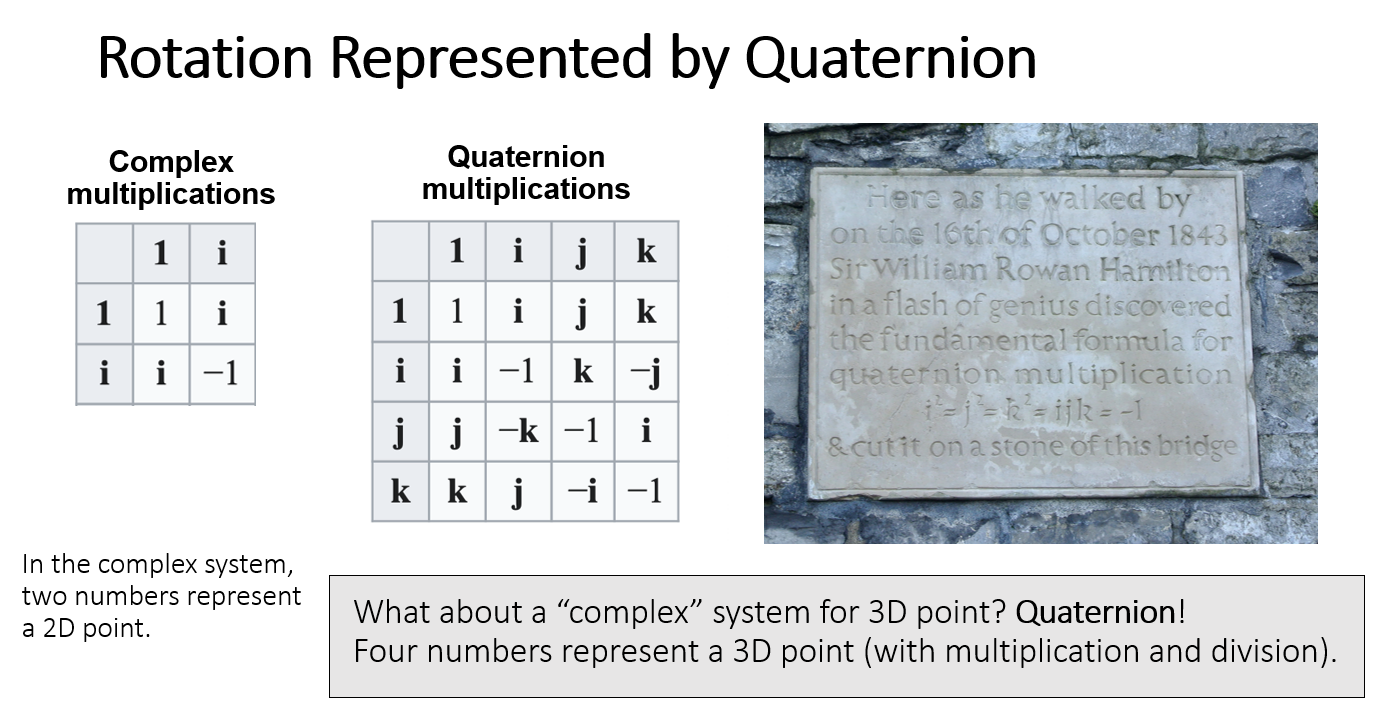
最后便引出了四元数:
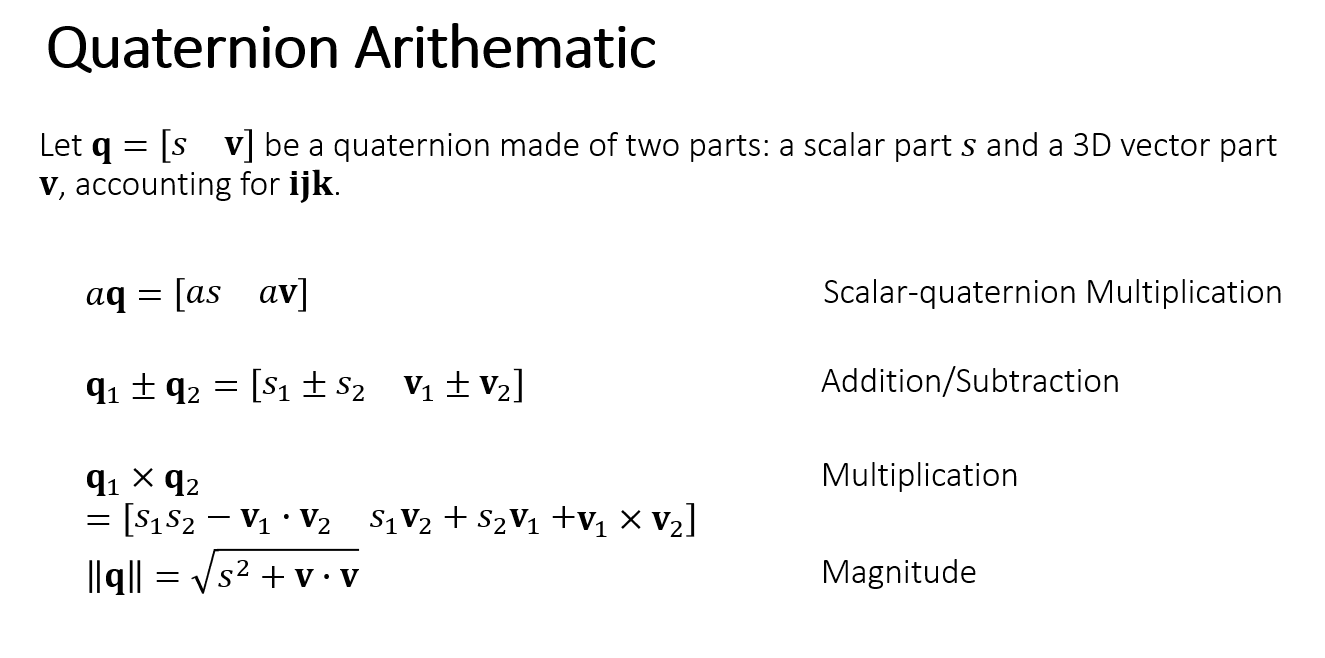
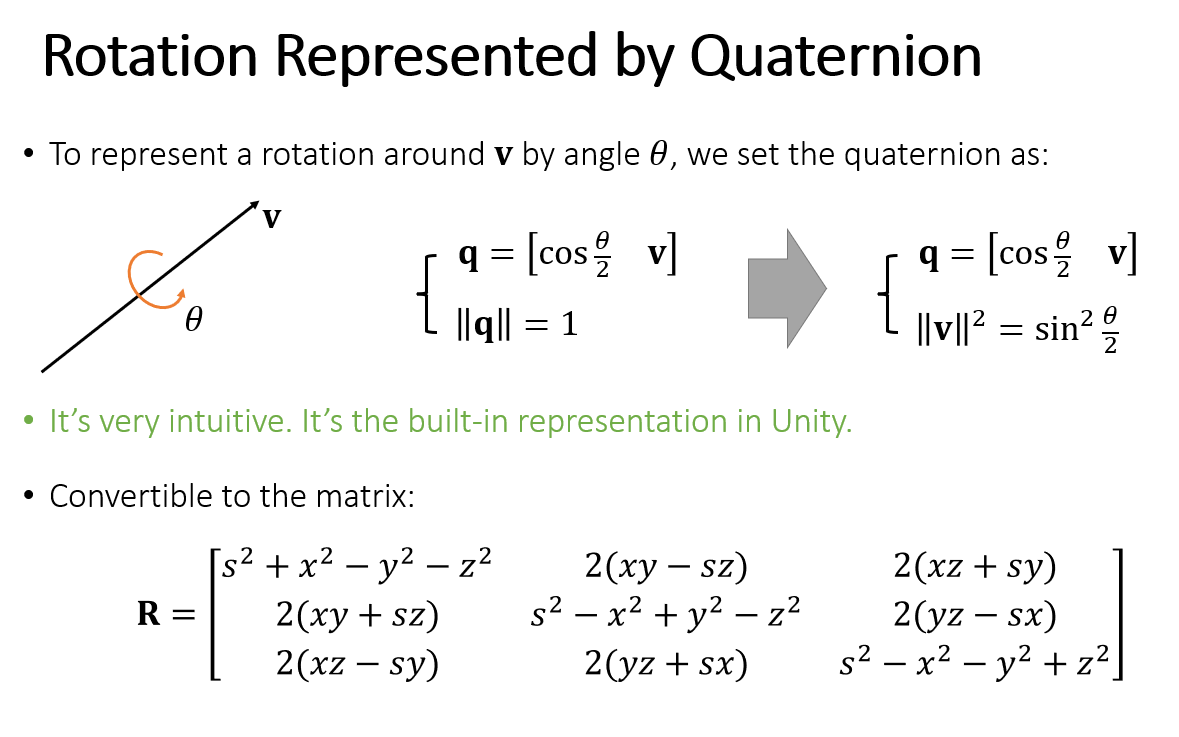
具体到unity中,面板上是欧拉角,而内置有四元数方法,两者可以通过赋值之类的操作简单转换:
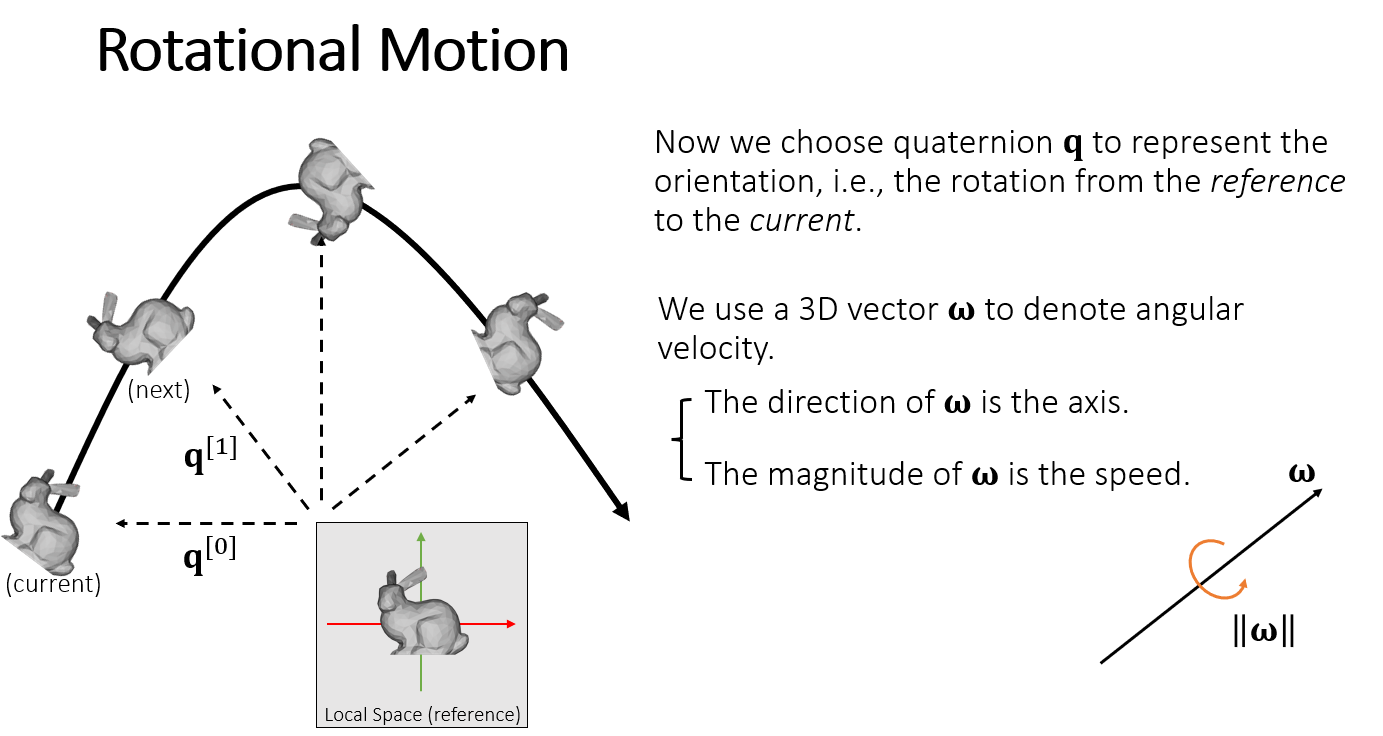
于是乎,我们就可以用四元数来模拟旋转了,但是还没完,还有时间的导数,即角速度,我们用 w 来表示,其方向就是速度旋转轴:
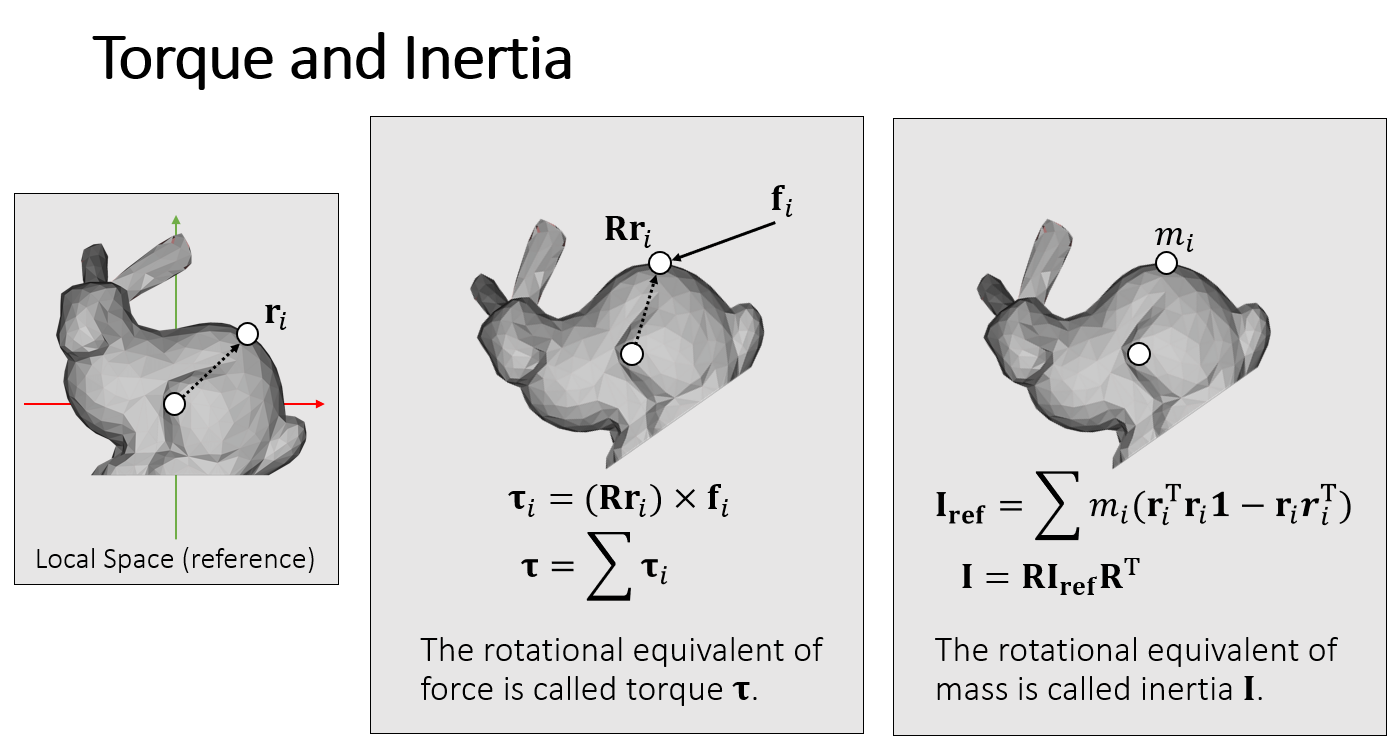
有了旋转的表示,我们还差力和质量,在旋转中叫做力矩(torque)和转动惯量(inertia):
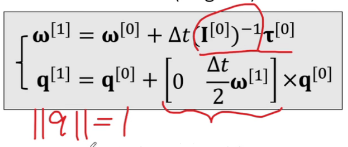
关于角速度的更新:
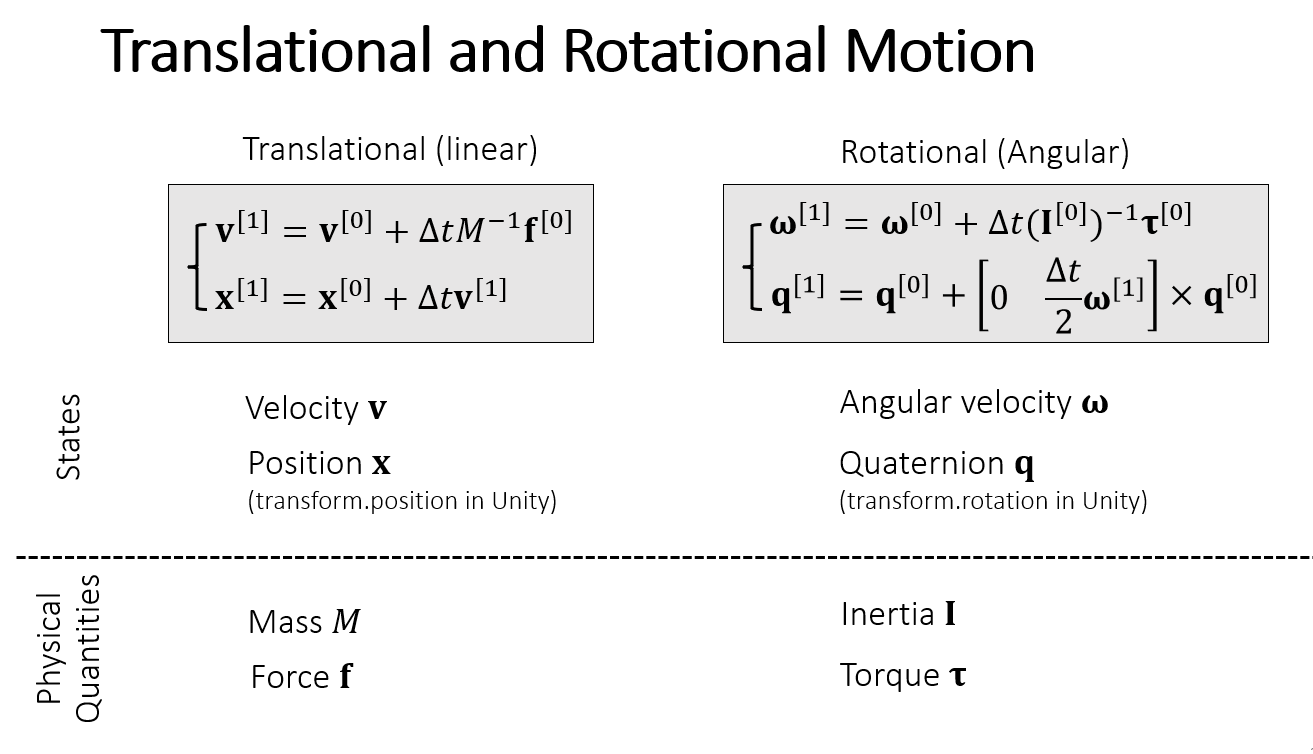
为了避免浮点精度溢出,最好对求得的 q 再normalize一下:
于是这四个变量(速度、位置、角速度、四元数)分别描述了刚体的状态,而质量和inertia都是事先提供的,力和力矩是需要中间计算的。
于是我们的模拟引擎就应该是这样:
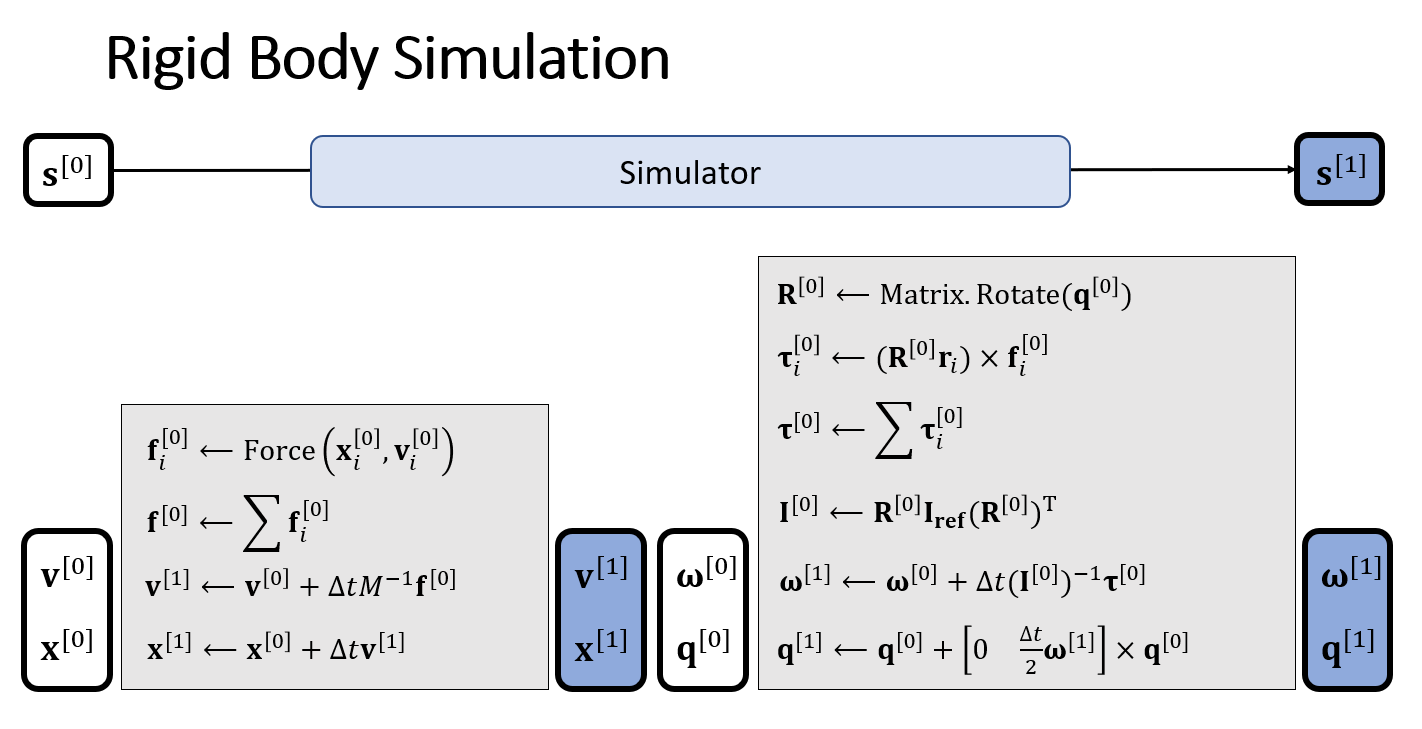
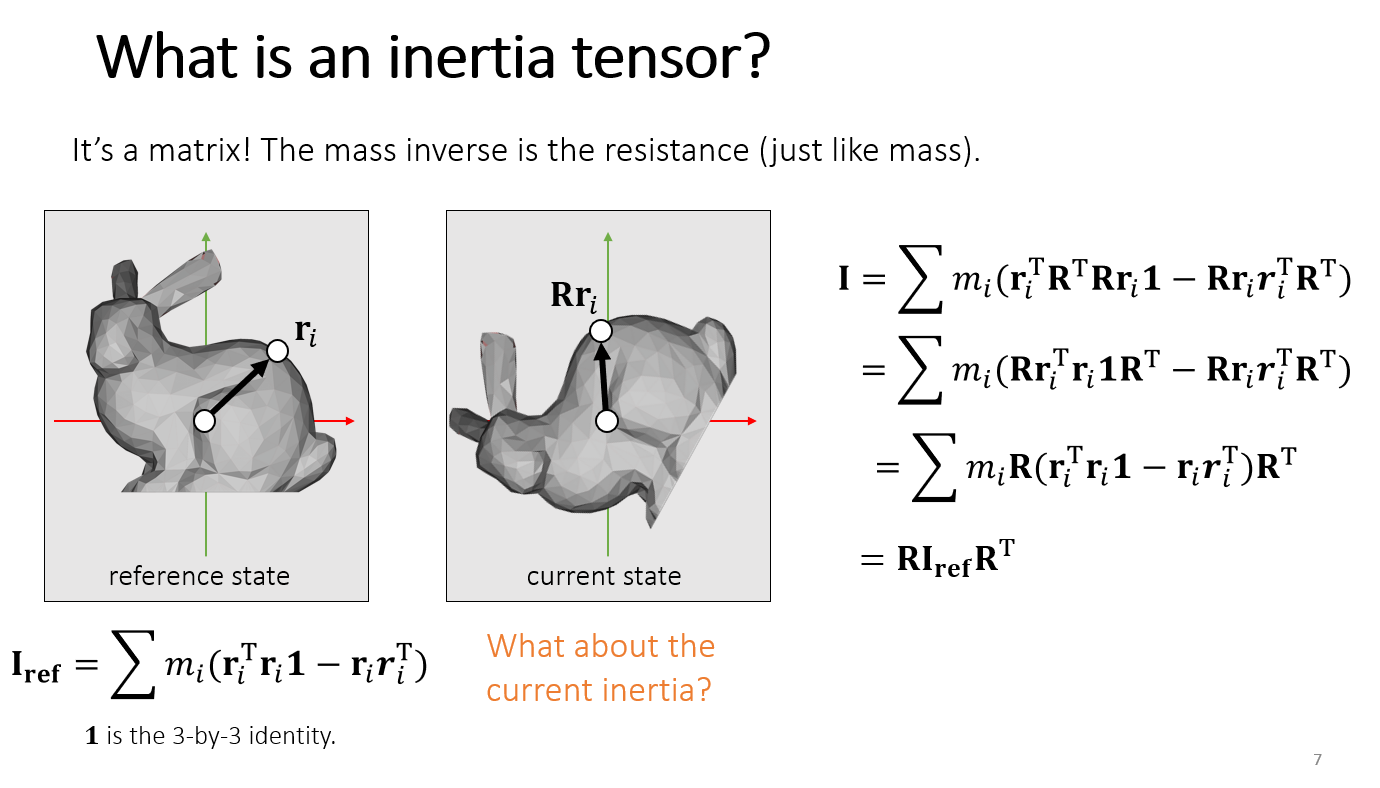
模拟中我们只需要每次算出来新的状态:s={v,x,ω,q},之后再覆盖即可。对上图左边,首先算出每个力,然后求和算出总的力,然后根据牛顿定律得到对速度的更新,然后速度乘以时间步长得到对位置的更新;对于上图右边,就是先有旋转矩阵,然后计算出力矩,接着需要根据reference state的inertia以及当前的旋转矩阵去算出current state的inertia,随后就可以更新角速度和四元数了。
对于扭矩(其实就是一种特殊的力矩),老师也解释了一下:
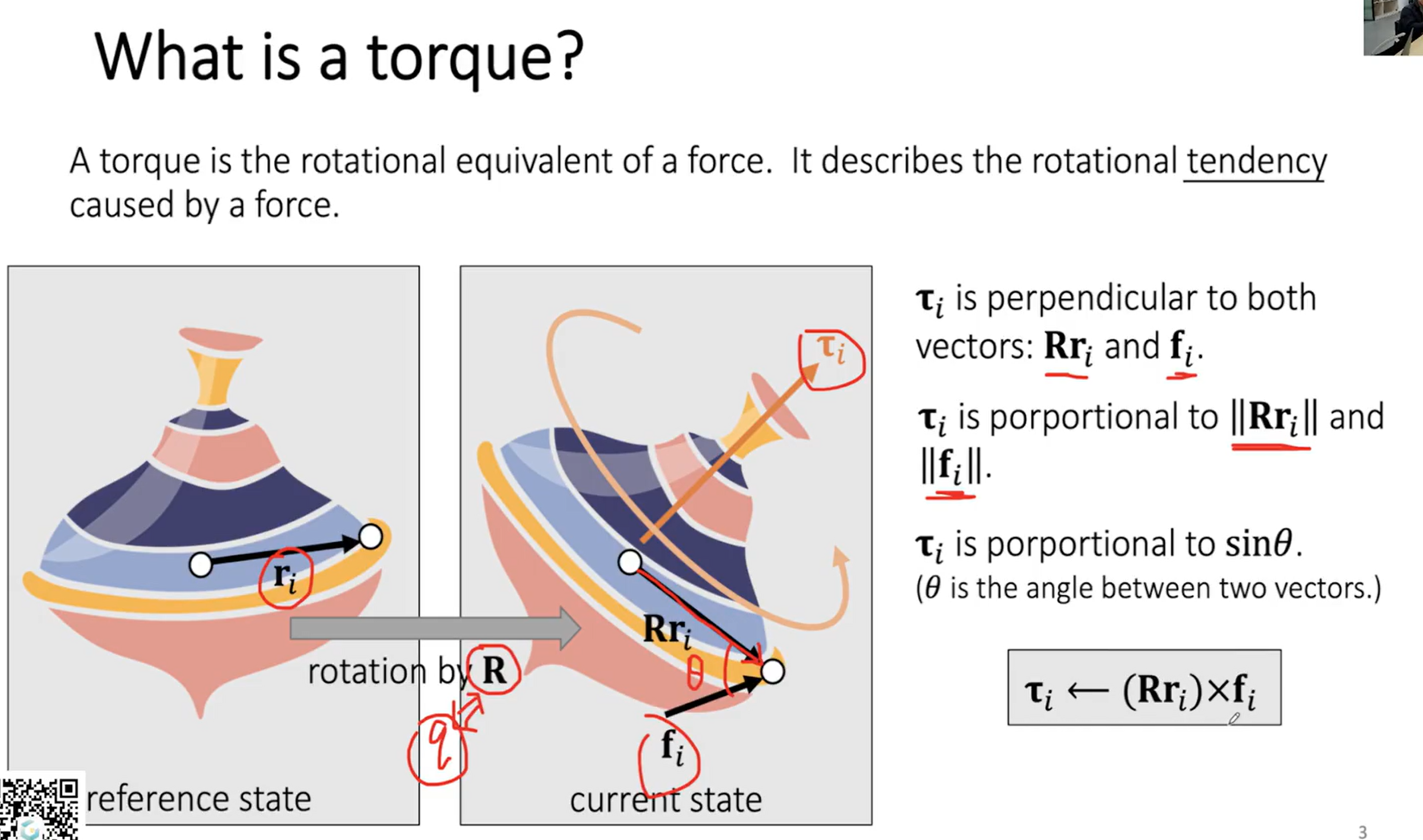
ri是固定的,而每次的旋转矩阵 R 则是变化的(可以用四元数去描述当前倾斜的状态)。可以从图中直观的看到:扭矩就是那俩向量的叉乘。
对于转动惯量,老师也给了一张很直观的图:
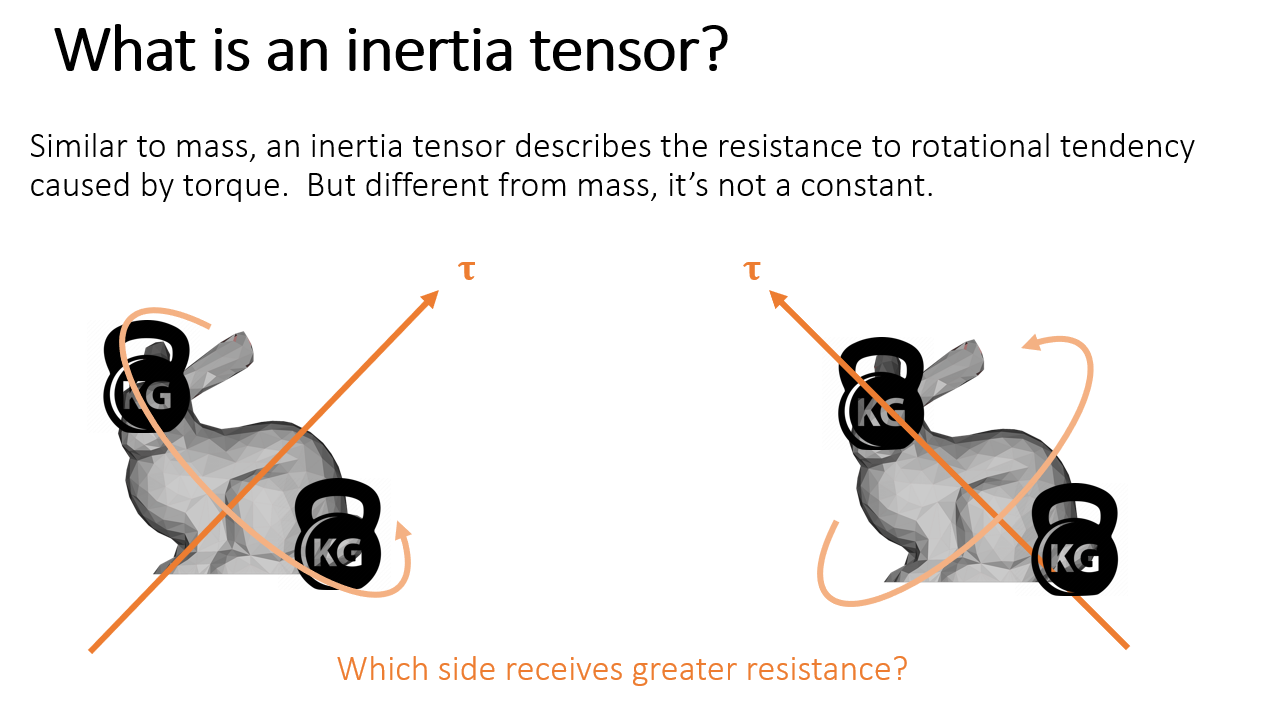
如上图,显然右侧旋转应当更快,因为右侧的质量都集中在轴上,所以产生的旋转更强。即说明了同一个物体产生的旋转不仅和 torque 有关,还和物体本身的状态有关,因此需要用一个矩阵去计算转动惯量:
4. Rigid Body Contacts(Lab 1 )
这节课讲涉及如下内容:
Particle Collision Detection and Response
首先介绍了带符号距离场sdf,可以参考我的笔记:https://zhuanlan.zhihu.com/p/398656596,此处老师定义的在外侧outside距离函数的值是大于0的。
这里提一下sdf的组合:
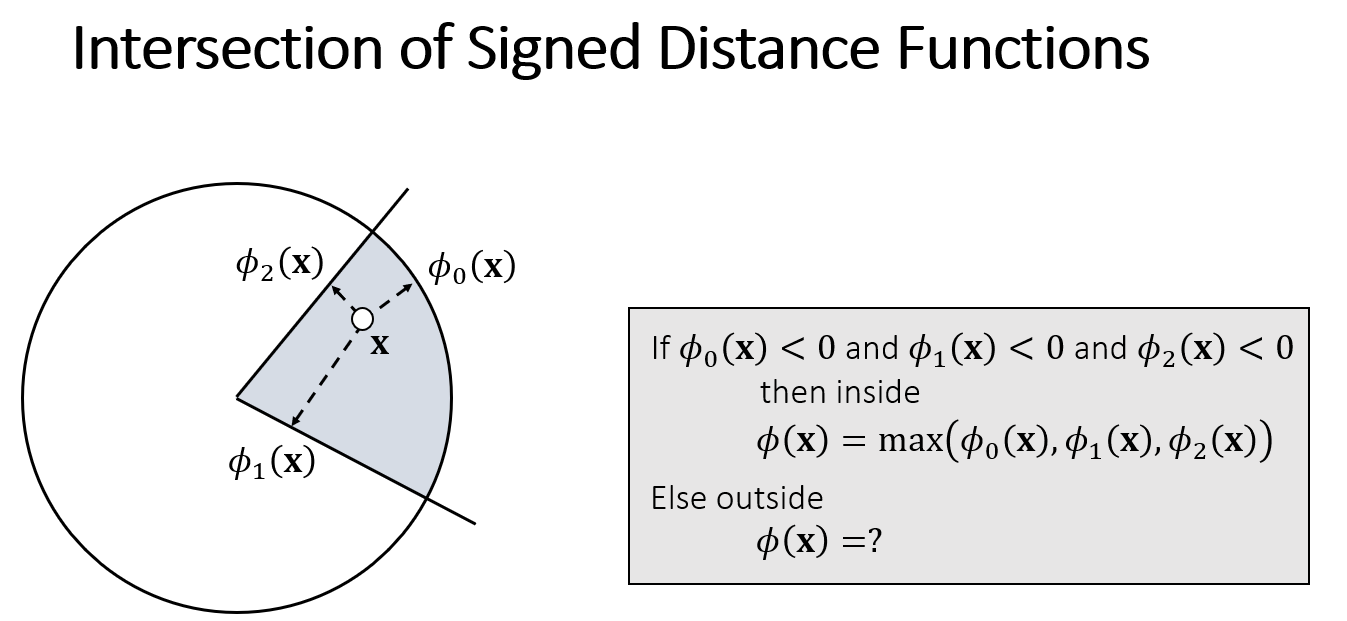
那么要是点x在内侧,也就是需要在三条边的距离函数都要在inside侧,即都小于0才行。点x的sdf值就是三者的最大值(因为都是负数,点x的sdf值其实就是到最近的边的距离的负数,图中为Phi2(x))
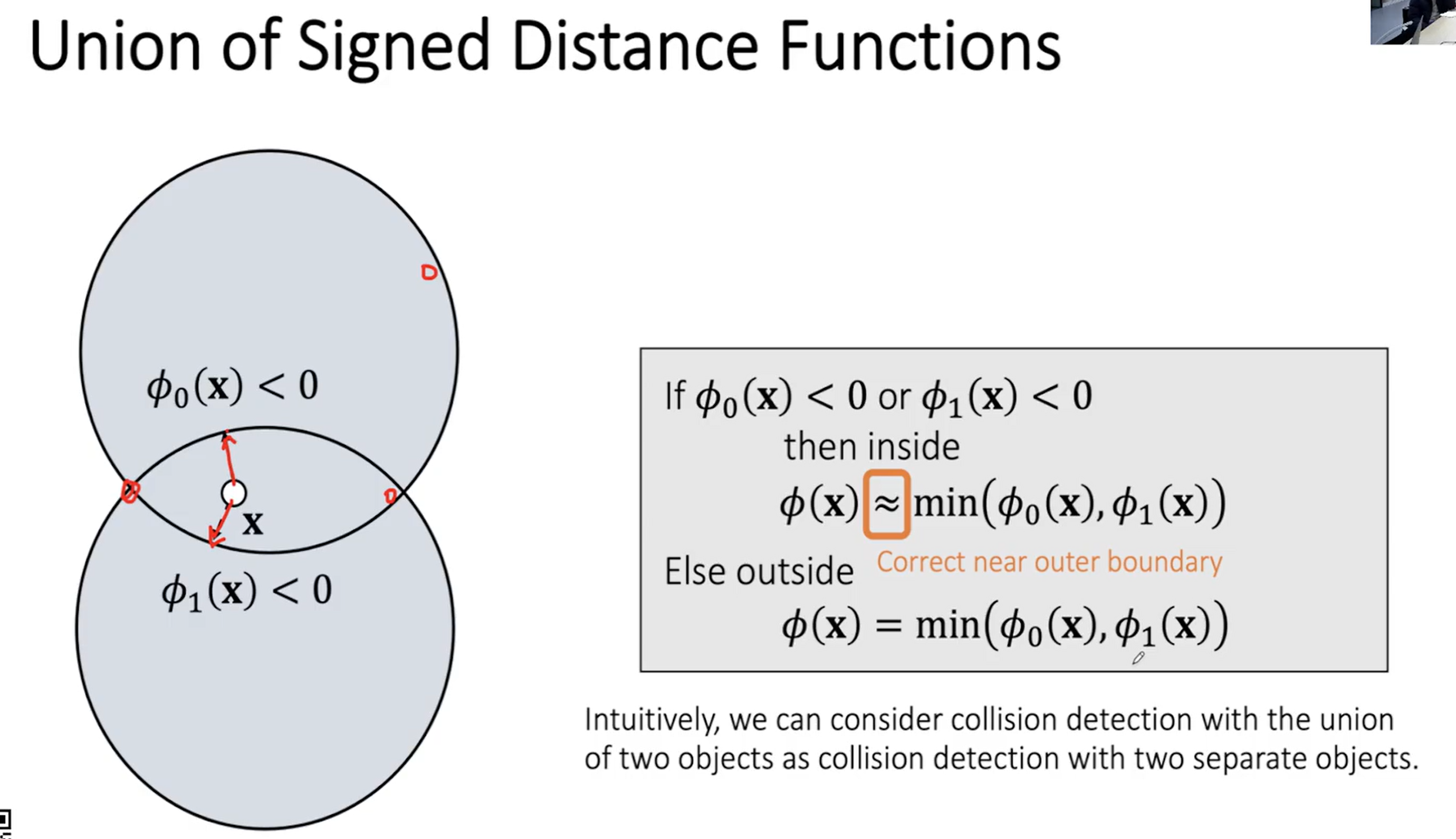
对于合并Union的情况,如果两个球合并起来,想要做相交检测,怎么判断这个点在内侧还是外侧呢?显然对于两个球分别的sdf函数,只需要一个sdf值小于0就在内侧了;但是要注意它的值有可能和两个sdf值都毫无关系,比如如图两个sdf值是上图两个红色箭头的模值,而x离边界最近的点却有可能是上图中的红点或是其他的点。因此只能说接近外表面的时候有这样一个近似。当然要是是outside就是两个sdf值的最小值了。
其实也可以认为这就是两个物体,然后分别做碰撞检测,是一样的。
对于一个简单的penalty的模型,检测是否碰撞一样就看sdf值是否小于0(点是否进入了物体内侧),如果发生碰撞(点在物体内侧)一个简单的处理就是把点推出来:
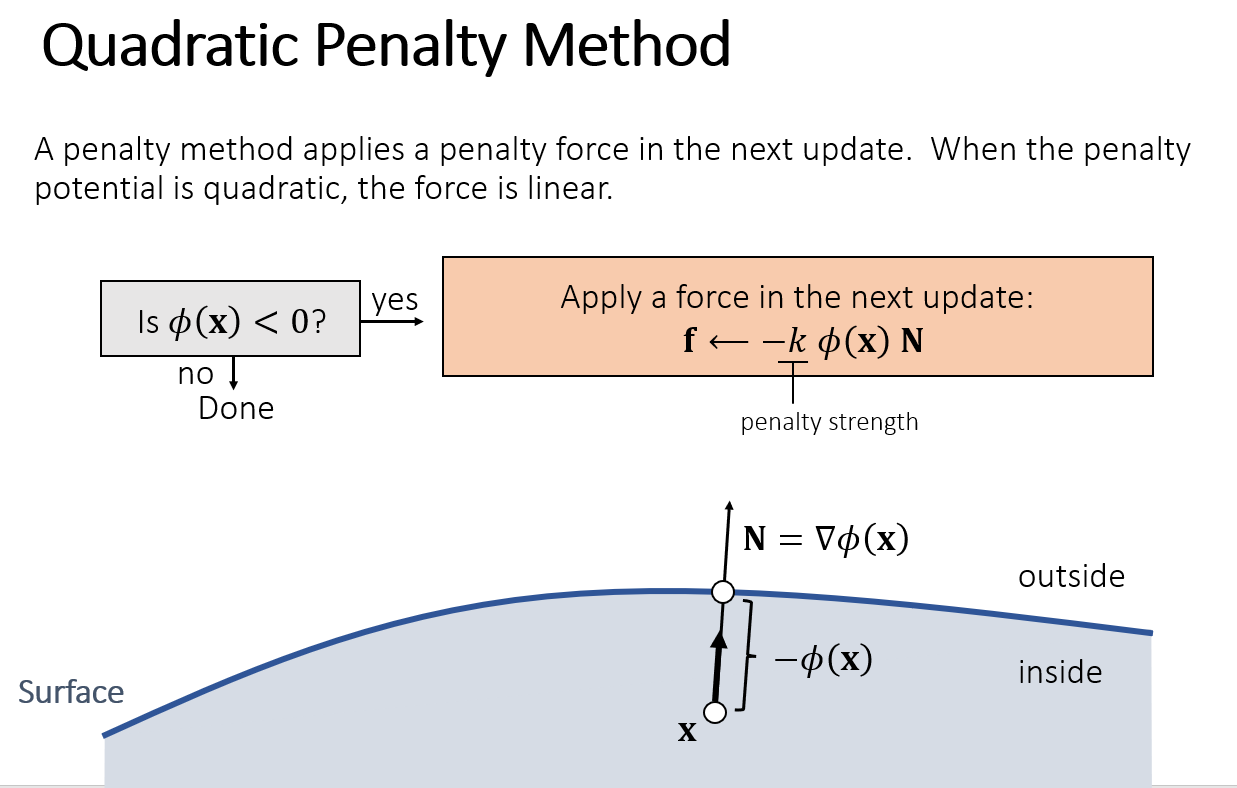
而如上图,定义力一个很简单的方法就是像弹簧一样,进去越深认为力f值越大。如上,方向就是这个sdf函数的gradience,大小就是这个sdf函数值的相反数(因为在内侧sdf值为负),k为这个 penalty 强度。
那么这种方法的弊端就是,要穿透进物体了才施加力,这就势必导致明显的artifact,一个改善措施如下:
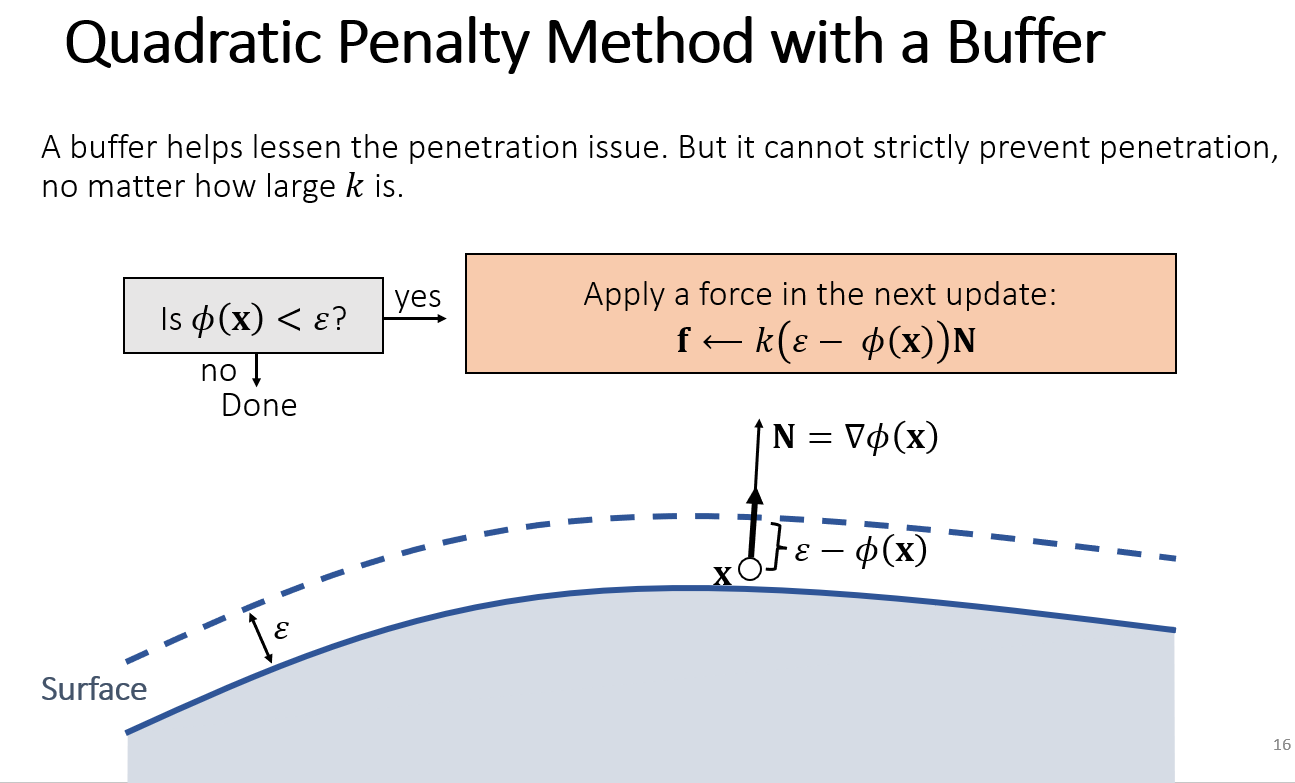
即弄一个epsilon,提早进行检测并处理。即只要靠近物体表面就加力把物体推出来,搞了一个小的缓冲空间。
然而这样做还是有点问题,即这个处理和 k 有关,如果 k 太小,那么要是物体穿透的比较剧烈就会有问题。而要是 k 太大,那么模拟的时候则可能导致产生的力过大,简单碰撞都直接被撞飞了,即 overshooting 现象。
避免的思路就是不要用常数 k ,把 k 弄成和距离有关的函数,得到如下的 Log-Barrier 的处理:
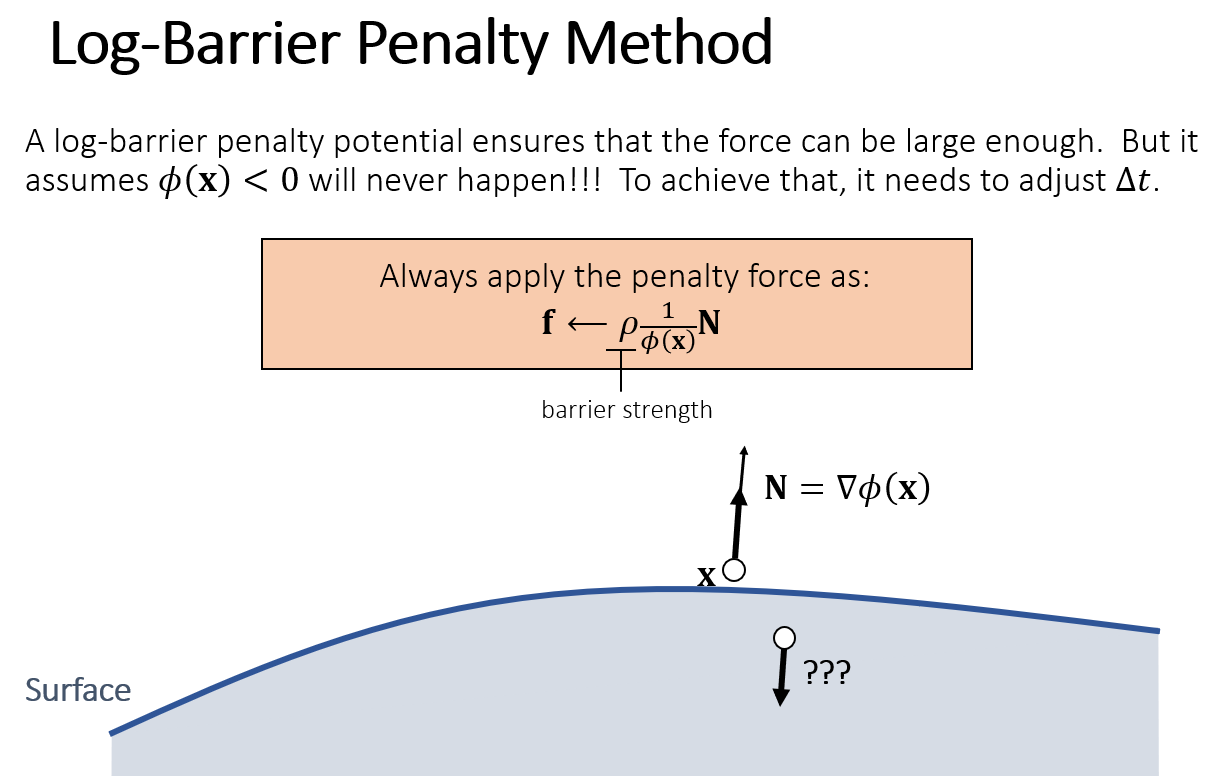
所谓 Log-Barrier 其实是对 log 求导就变成了倒数的方式。一般这个强度 barrier strength 是固定的。
但是这样仍然有蛮多问题,一是仍然避免不了 overshooting,二是如果穿透了但是这个力的方向却是相反的,会越陷越深。因此这个方法实际上有一个假设即穿透永远不会发生。因此要避免穿透就只能采用小步长的方法:每次往前挪一点,以确保每次都不发生穿透。因此会带来很多额外的成本。
Penalty Methods 总结:
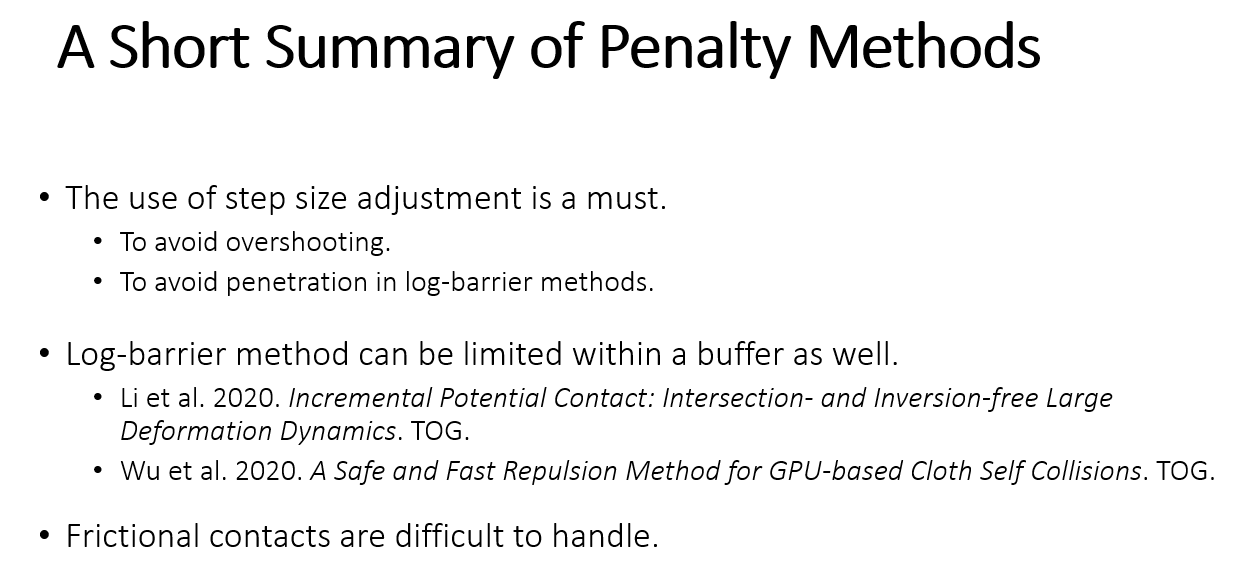
好处是易实现:加了一个力,然后就可以按正常的模拟方式去计算。同时这里我们可以看出,施加一个力它并不是马上就起作用的,因为力的模拟将在下一个时刻才进行。是有一个滞后性的。
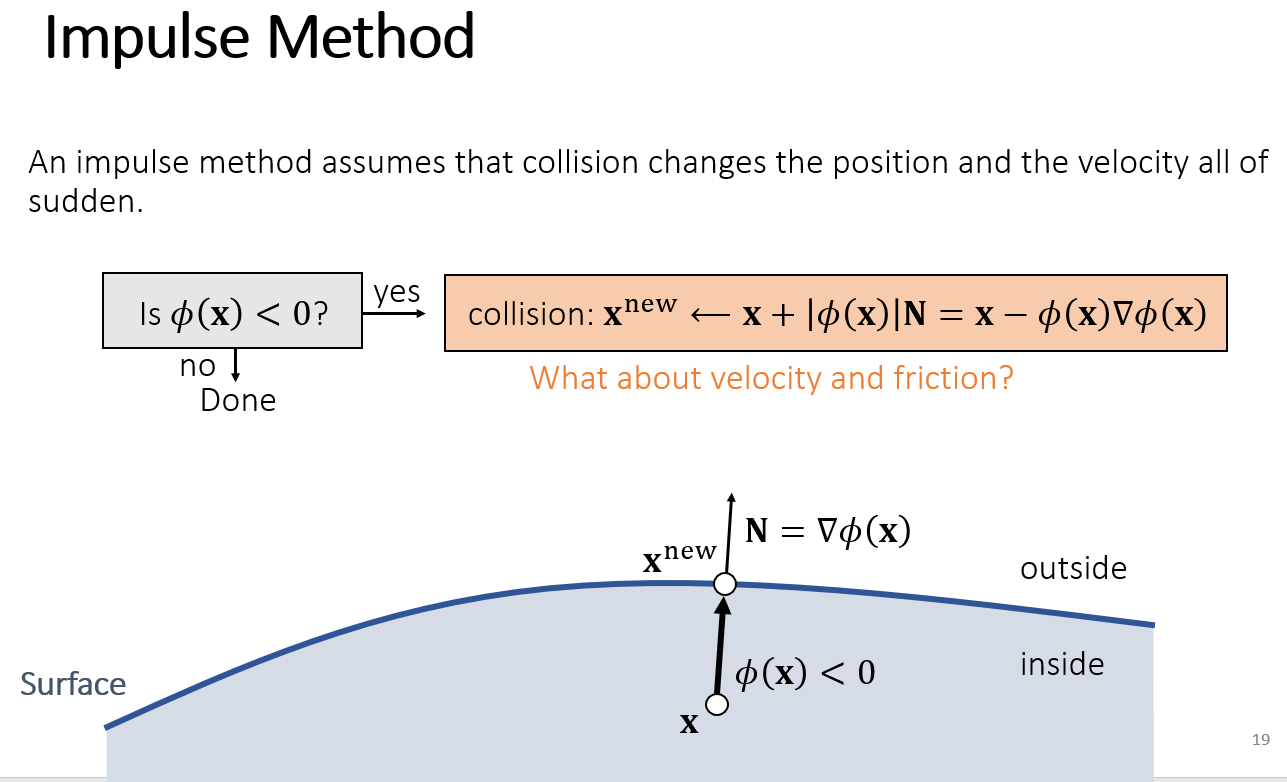
接着介绍 Impulse 的方法:
Impulse,本意就是 脉冲、冲击,物理中意为冲量。即我们不想像 Penalty 一样有滞后性,想要马上起作用,即碰撞检测到之后马上更新速度位置。
想法很简单,把 x 沿着那个 Normal 的方向移动那么多距离就好了:
那么对于速度呢?能否考虑摩擦量呢?
首先要判断速度方向大小,先做个简单的分解(切方向和法方向),然后去进行更新:
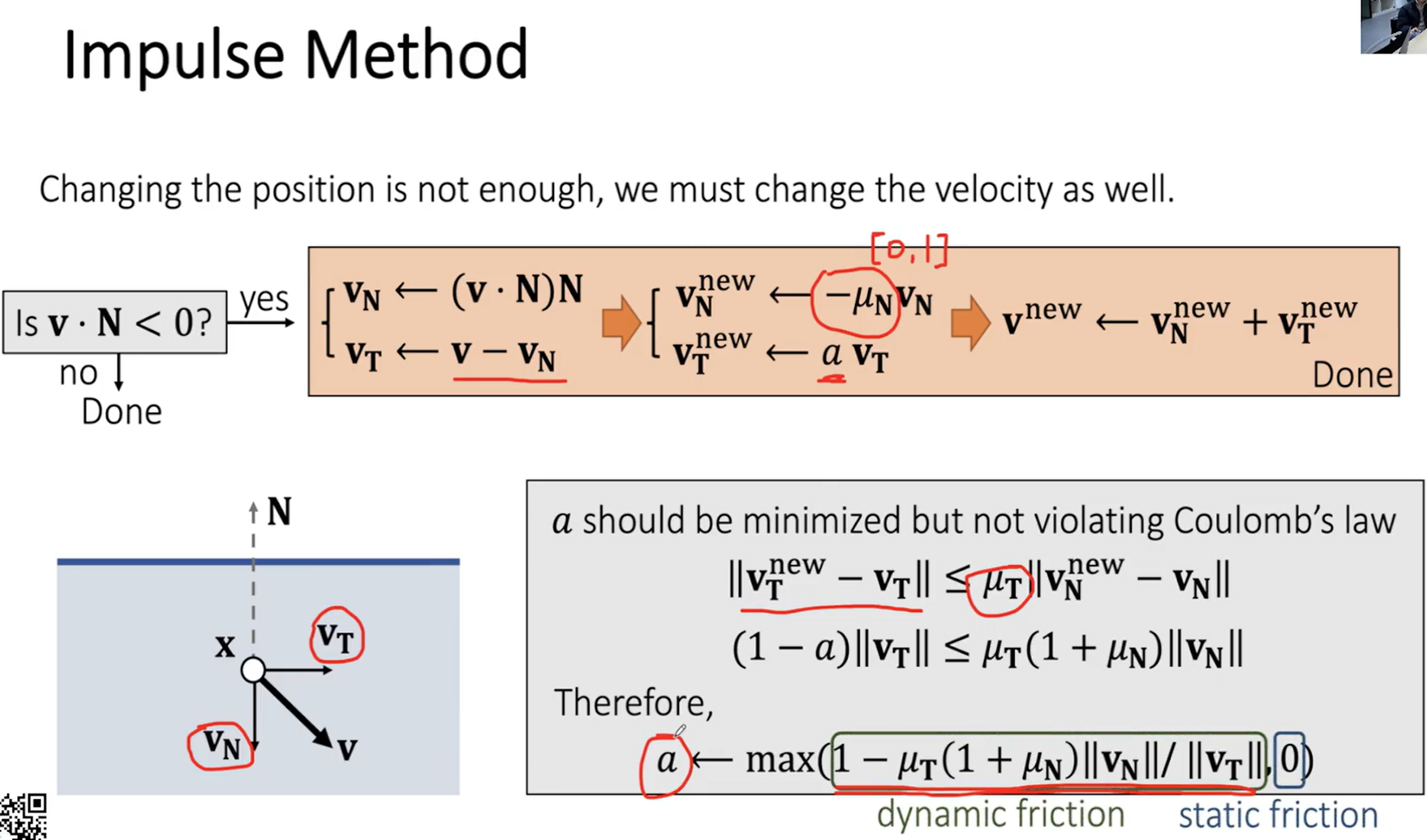
这个a和摩擦力有关,我们永远希望越小越好,把切方向的速度衰减掉,但同时a须满足一个库仑定律,并且避免反转速度需要和 0 取最小值。因此计算如上图右下角所示。如果取 0 为静摩擦(说明强到让其停下来,为静摩擦),取左边的值则为动摩擦,实际上反应出摩擦力的两种形式。
Rigid Body Collision Detection and Response
回忆,local space 和 world space(reference 和 current):

刚刚讲了对每个点的碰撞检测以及响应,这里开始刚体的碰撞检测及响应:
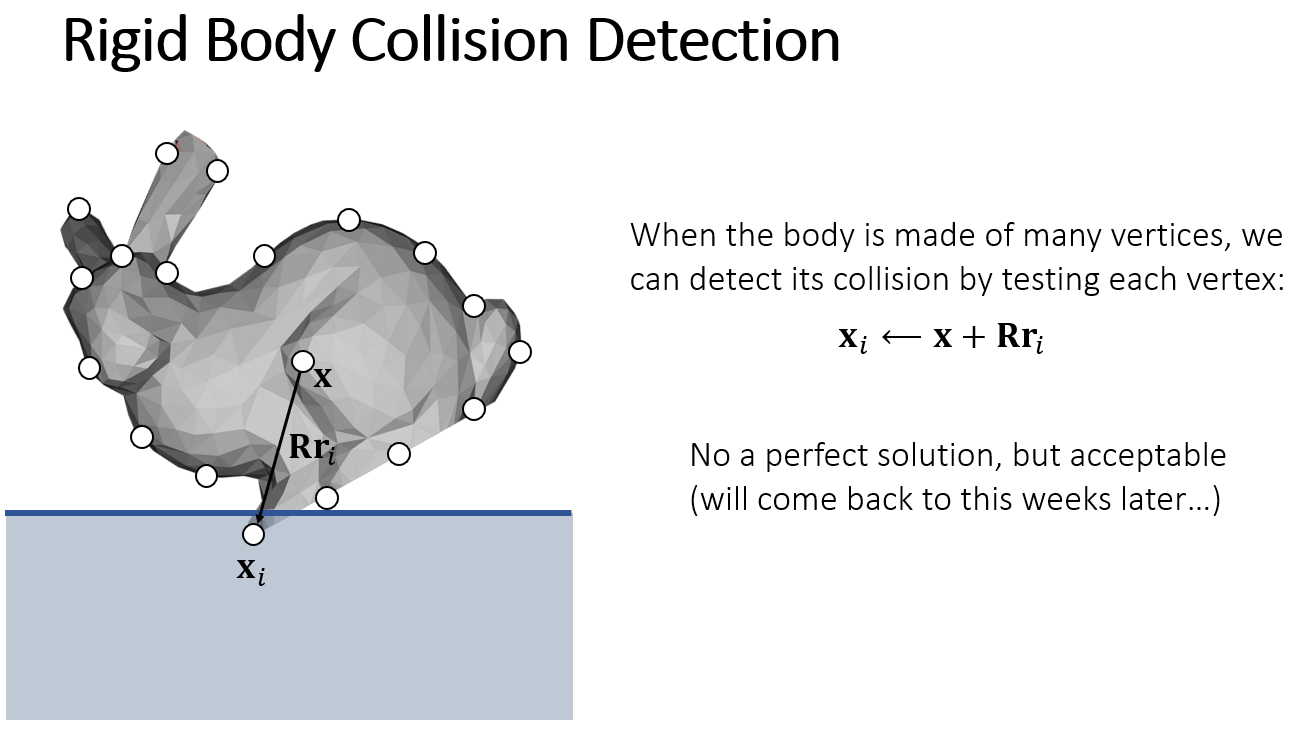
如上,兔子表面每个点可以用质心+一个向量去表示,得到每个点再去遍历做检测即可。
碰撞点的位置速度如下公式:
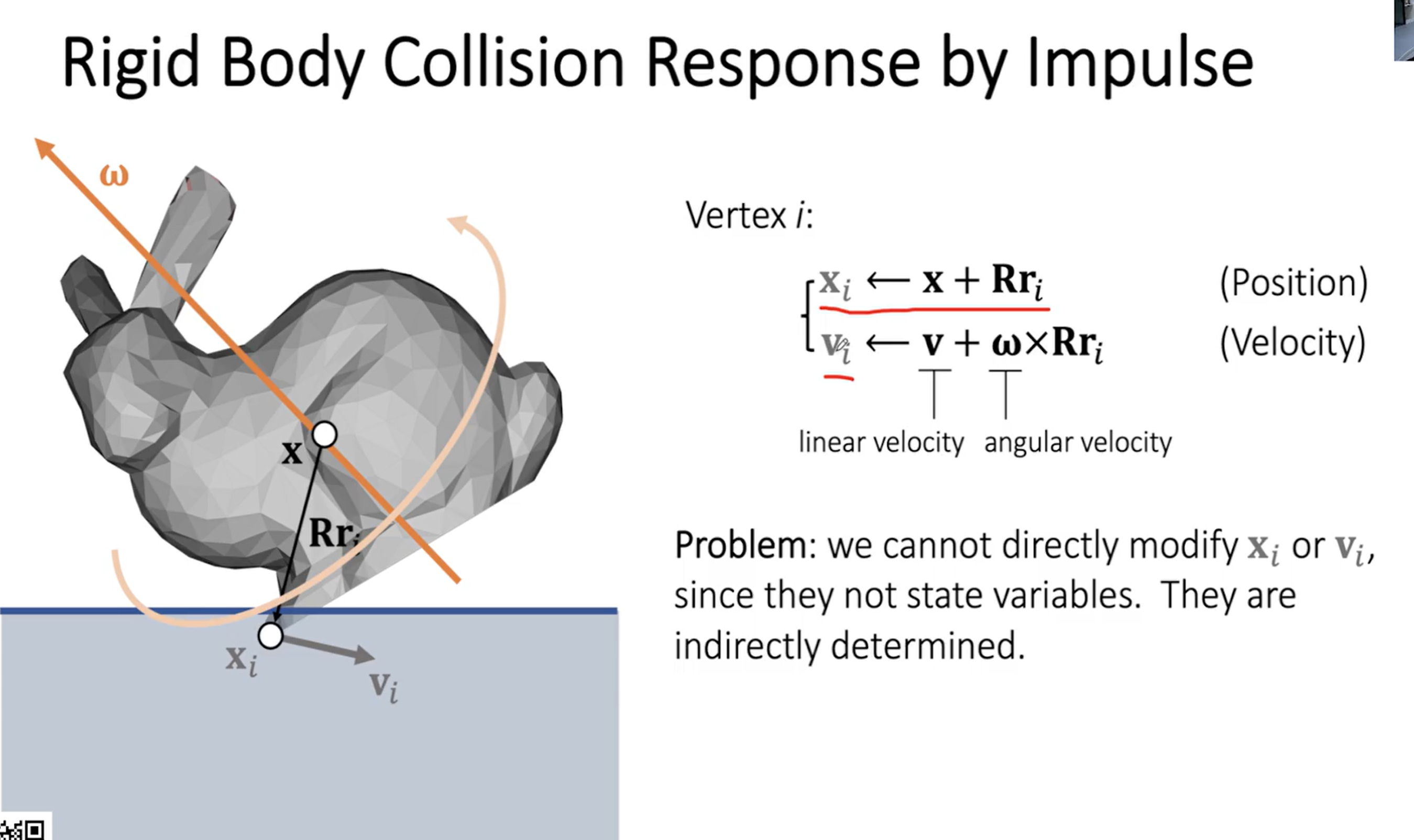
但是问题是,我们之前讲过,我们的状态仅保存质心的四个变量(速度、位置、角速度、四元数),而对于表面上每一个点我们其实是不保存他们的状态的。因此利用前面impulse的方式去修改他们的值是没有意义的。
解决方法其实很常规,就是把冲量带来的影响直接叠加在质心的速度、角速度上:
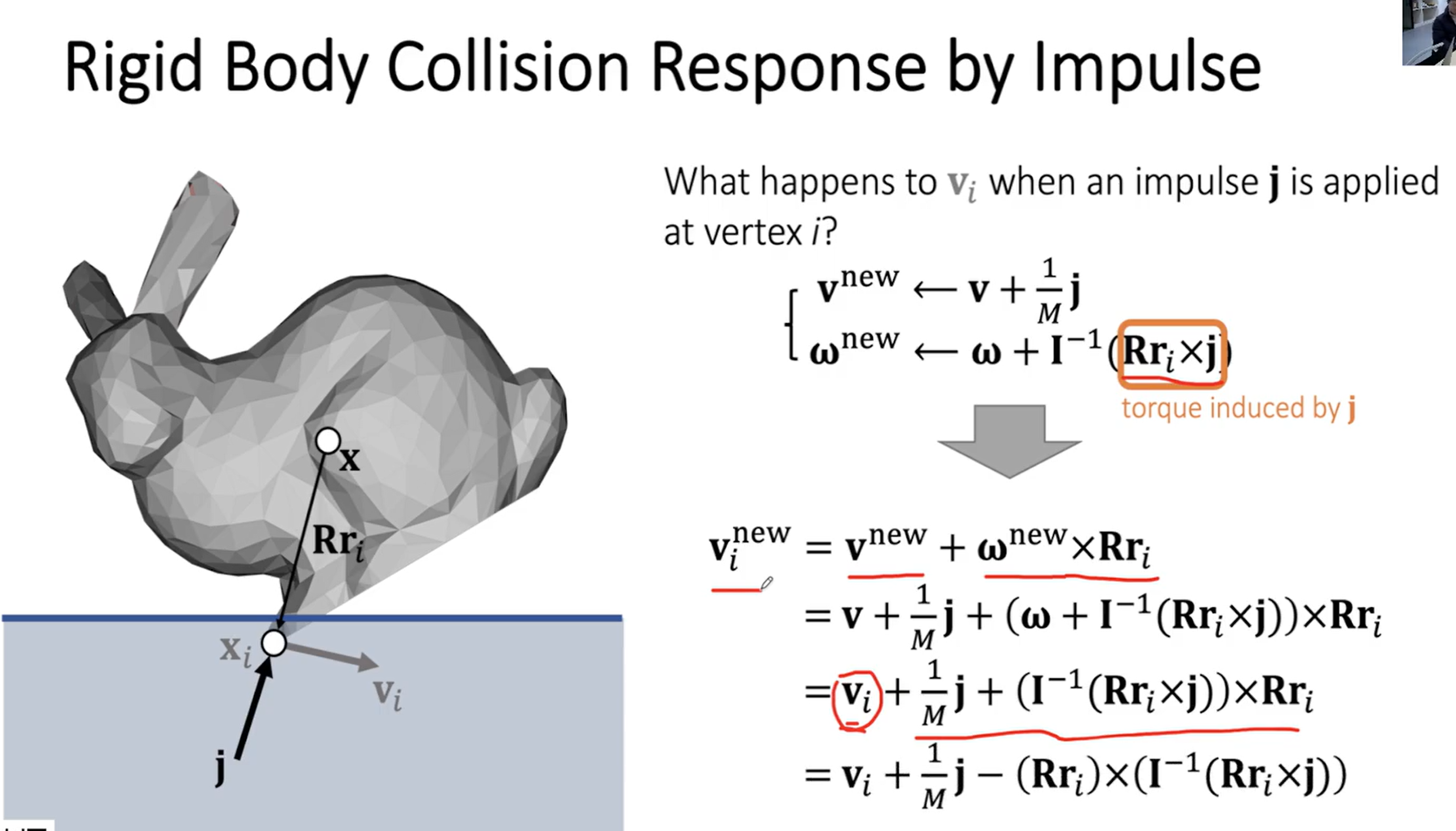
然后就可以接着去计算每个点的速度了。
接下来利用叉乘的这个公式:
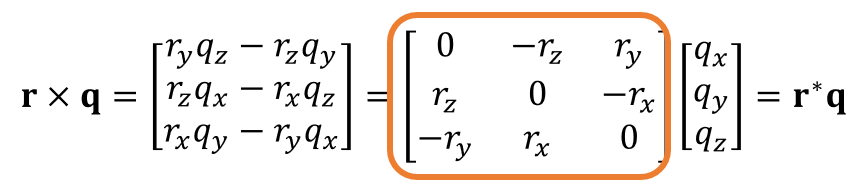
我们就可以进一步转化当前表达式:
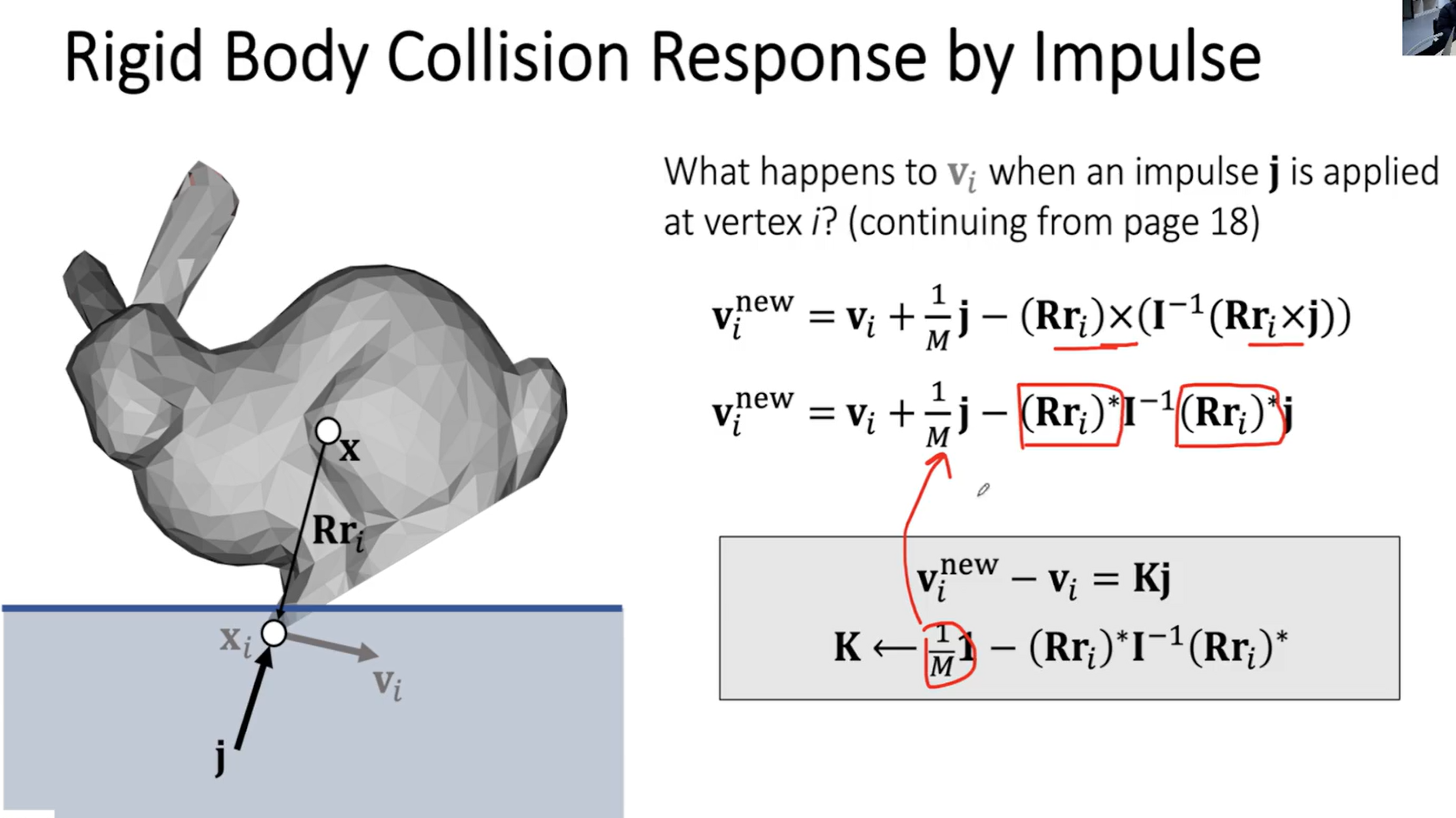
简单意思就是,冲量 -> 造成点的速度的改变 , 利用上图所示的这些关系把 j 算出来。
理一下整体流程:
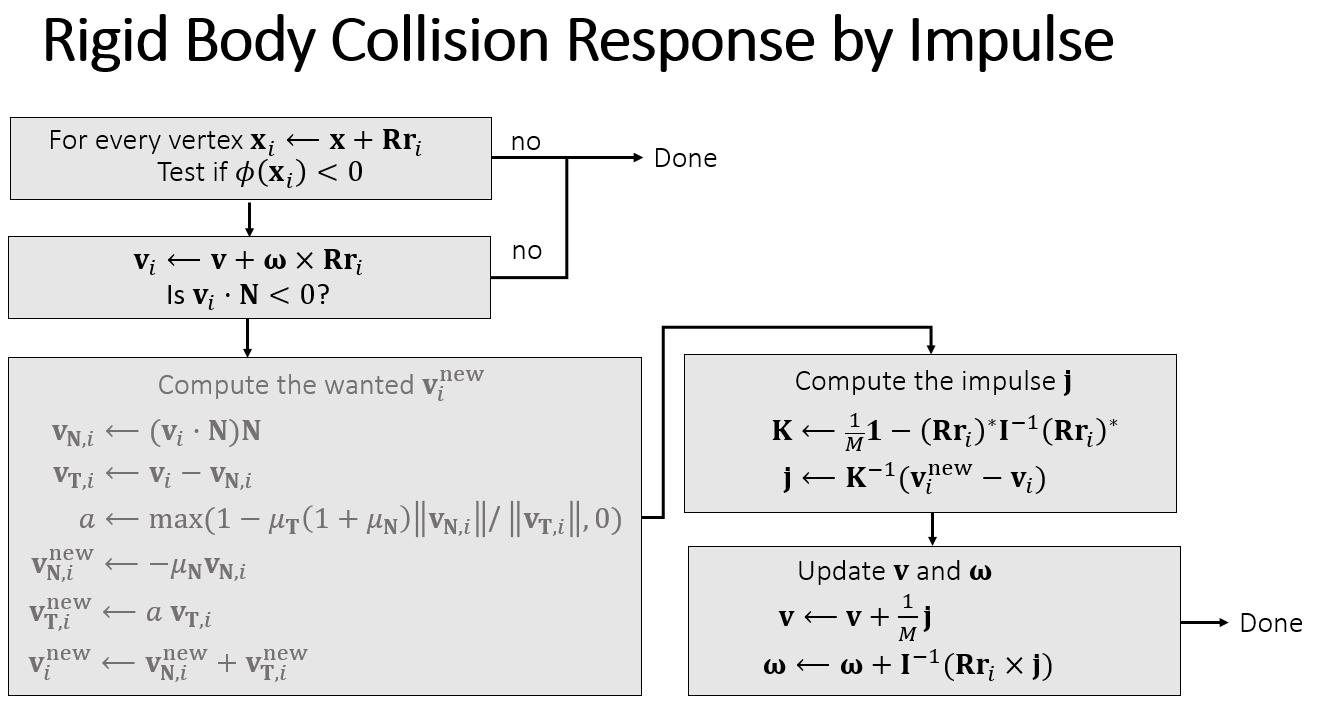
首先去对每个顶点计算出每个顶点的位置,然后去检测一下是否有碰撞(根据sdf值),若是有碰撞则进一步去把碰撞点的速度算出来,然后判断顶点是否继续往下掉(是否继续穿透);如果还要继续穿透就要继续处理,那么这时就要去算 Vi new ,计算方式:先分解出法向和切向,然后去计算关于摩擦的系数a,接着得到质心的新的normal方向和tangent方向的速度,于是就可以接着计算出 Vi new;这里计算 Vi new 那一块是灰的,原因是 Vi new 只是一个中间变量,实际上应该更新线速度和角速度;更新方法是用冲量的方式去更新,先计算出 K ,然后得到冲量。得到冲量后,回到 v 和 ω 去更新。
实现细节:
如果有很多点就用他们位置的平均值;由于重力的影响,会有抖动 oscillation 现象(在表面上,由于重力和所施加的反弹的力,会有反复抖动),从美观的角度可以去做如PPT所示的一个小hack,去衰减这样一个抖动。
事实上,处理这么多点不见得很慢,因为所有点只是都去检测了一遍是否碰撞,真正要处理的只有那些要碰撞的点。
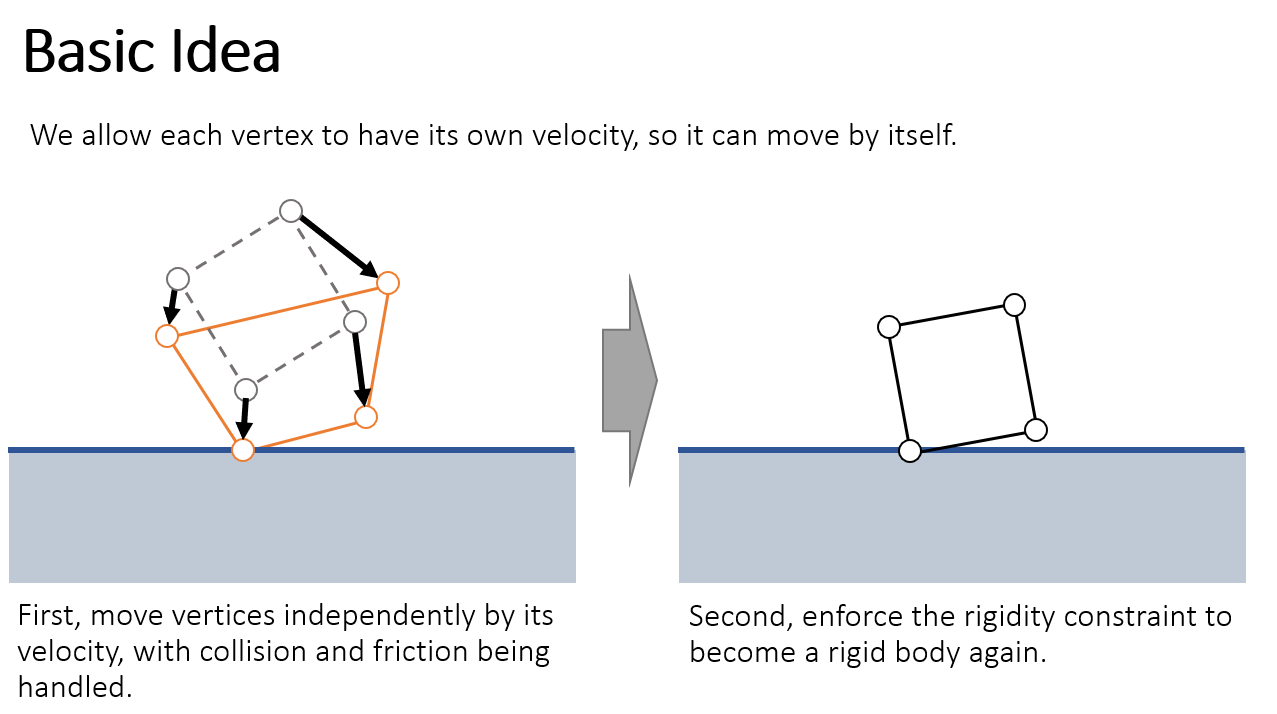
Shape Matching
先假设这些点都不是刚体,简单的说就是先直接对每个点进行模拟,然后再把这些点恢复成一个刚体。因此关键就是恢复成一个刚体的过程:
因此在Shape Matching中,质心位置c和旋转矩阵R我们是不知道的,而模拟后每个点的坐标我们是知道的(记为 yi ,如下图):
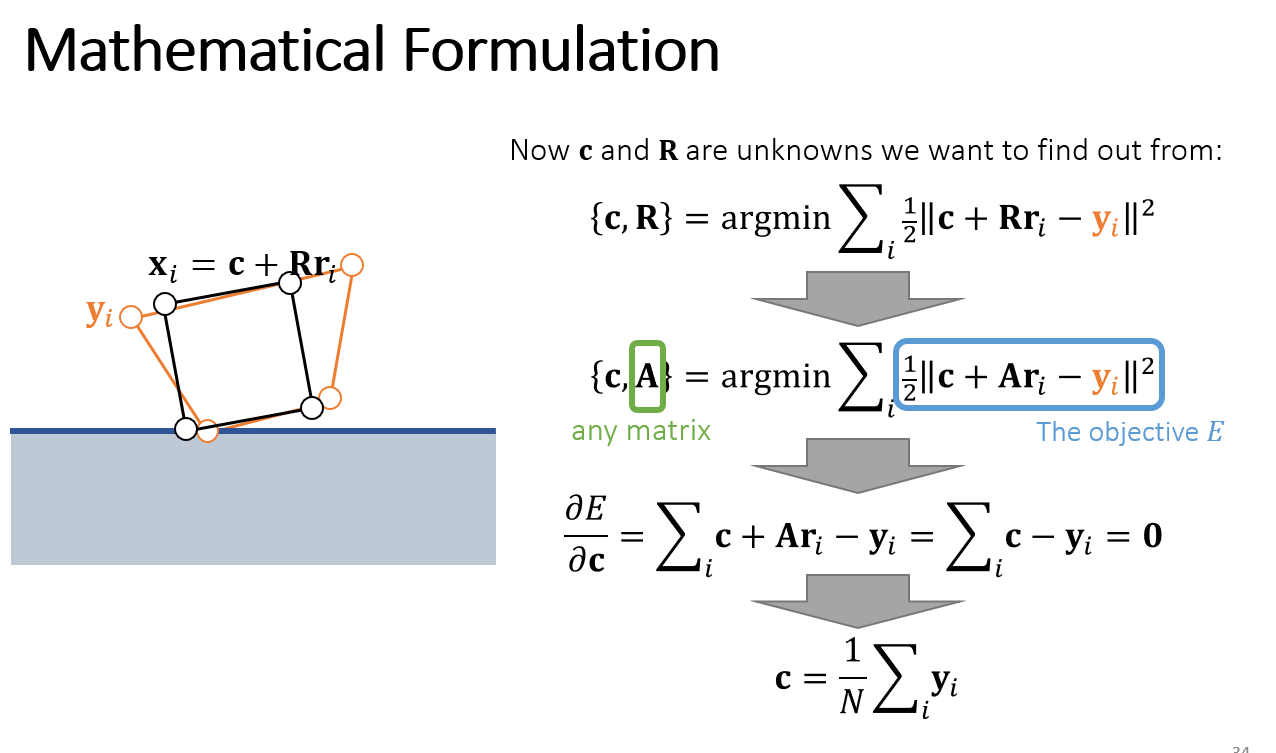
我们要恢复成刚体,自然希望这个范数表达式最小,进一步处理(对c求偏导)整理就得到了上图最下侧表达式。这个表达式很直观,其实也不难想象,质心就直接是这些点坐标的平均值。再对矩阵A求导得到:
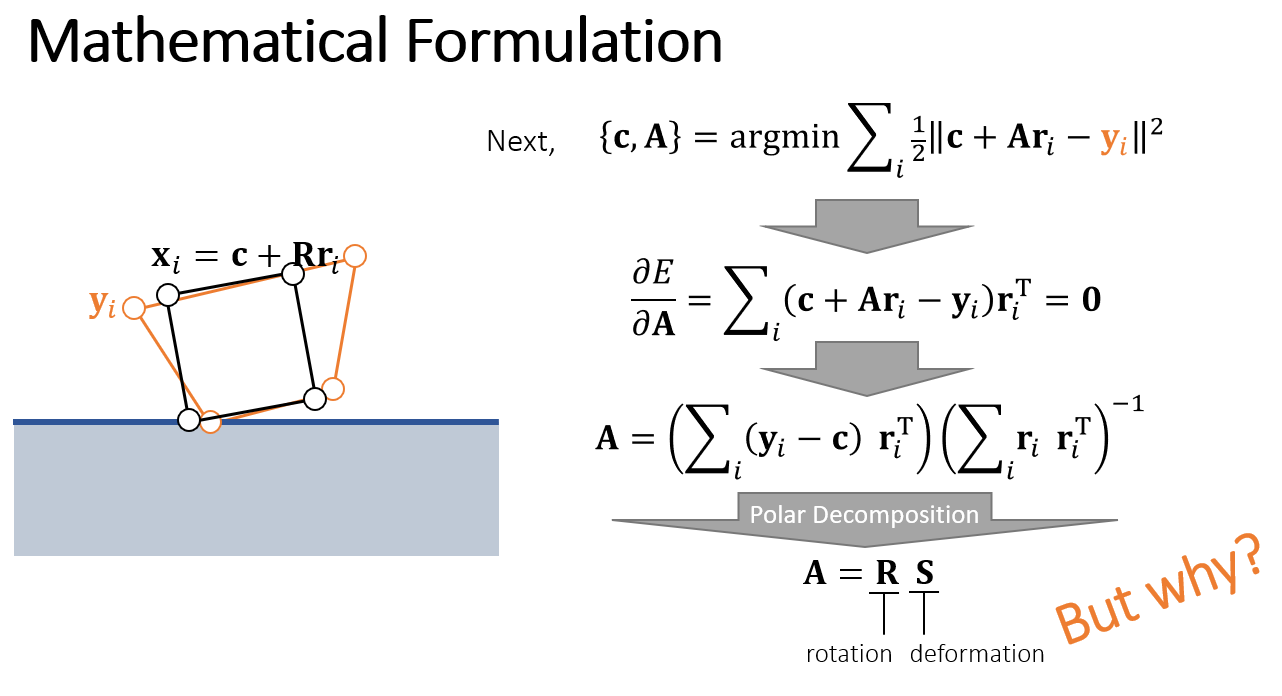
得到A之后再分解成旋转矩阵和一个对称矩阵(形变的部分)。这个旋转矩阵就是我们想要的部分,即我们要得的旋转矩阵。至于为什么我们回到SVD中:
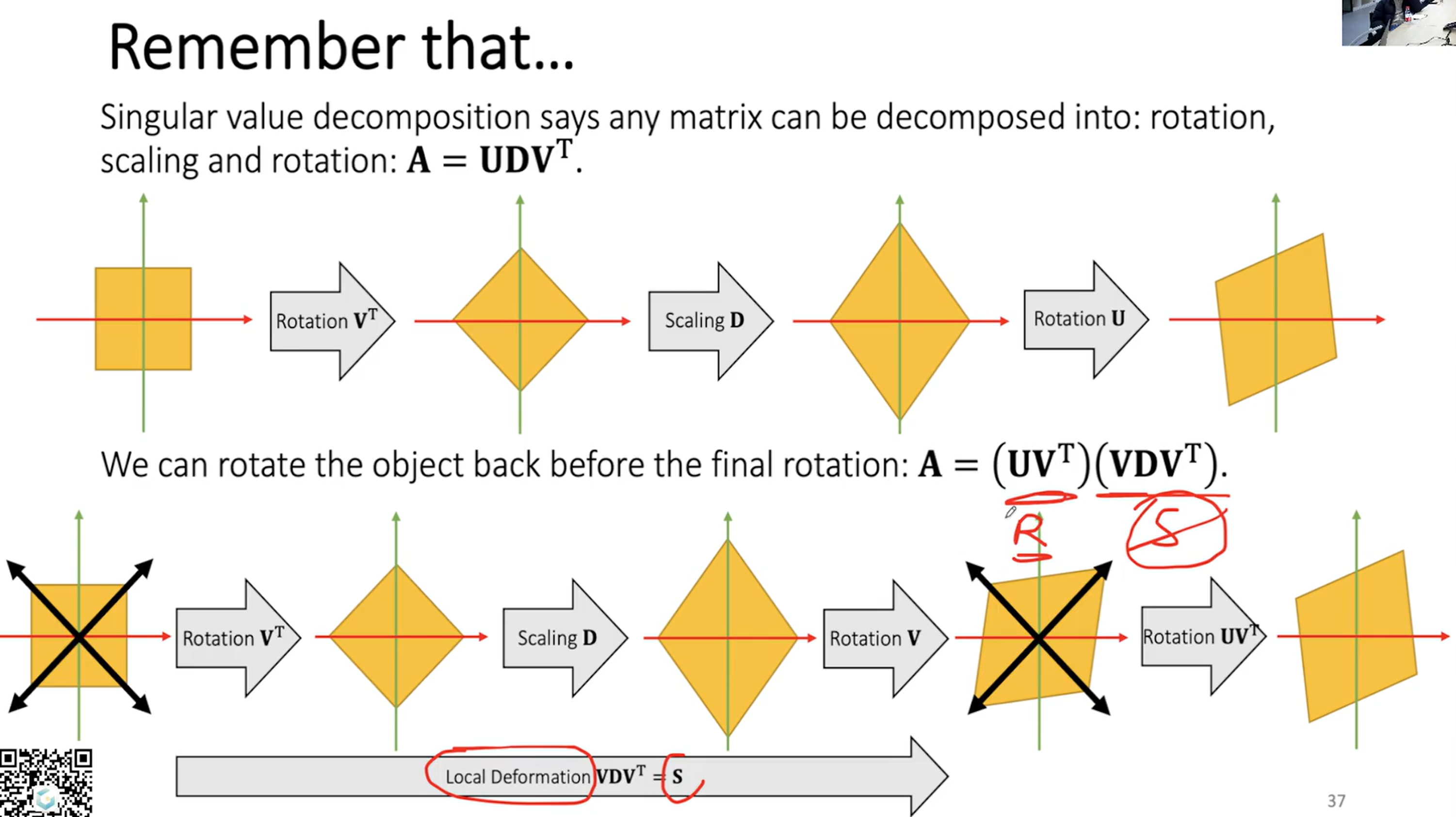
如上图下面做一个小的变形,前面三步叠加实际上就是S矩阵,效果是在本地做了一个形变(如图展示的效果就是沿着黑色的轴做出了形变)。
因此总结一下流程:
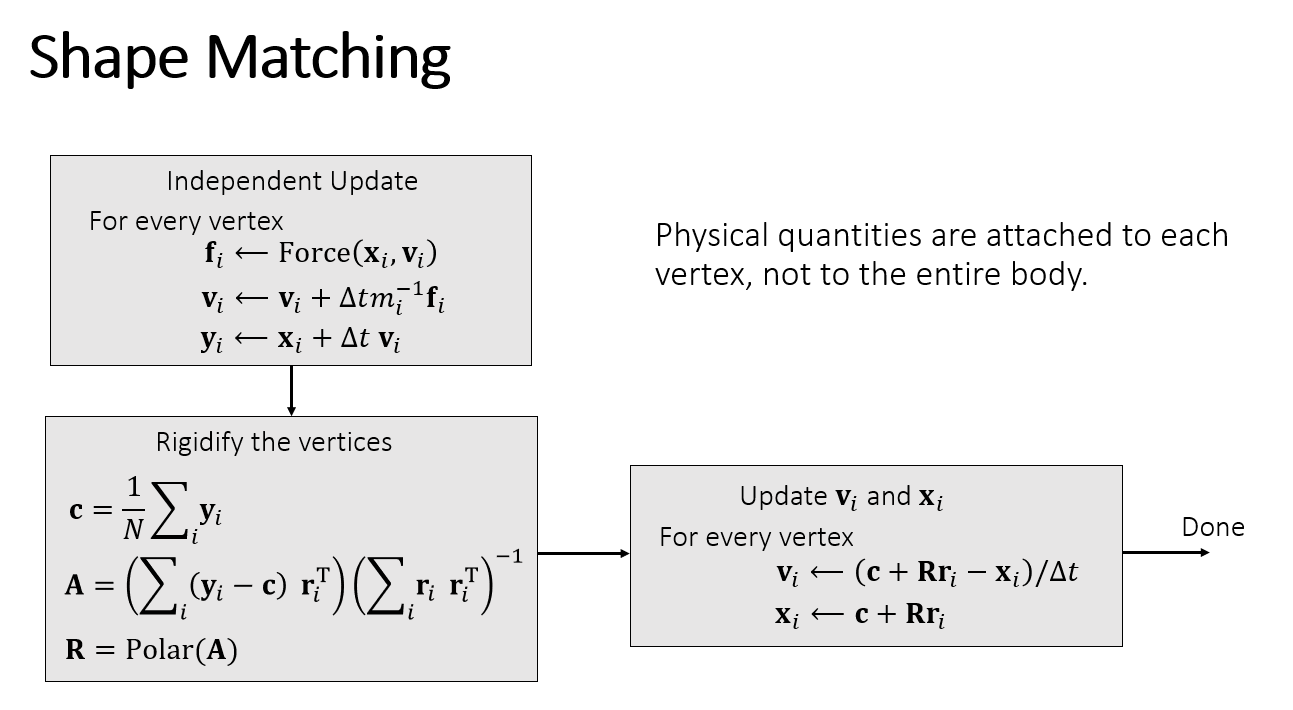
先对每个点独立地去进行更新模拟,得到每个点的位置y后,再去根据之前所述的公式把质心c和旋转矩阵R搞出来,然后更新速度和位置。
缺点在于很难严格地保证约束,且很难保证所有的约束都满足(可能需要迭代的方式反复约束)。一般当模拟精度不太高的时候(比如模拟衣服和扣子,刚体接触不太频繁)就可以考虑用 Shape Matching 。
Lab1
放一点我个人心得:
由于Unity数学库有点不完善,有一点小trick。
回到第四节课讲的实现细节中:
第一点,要注意用平均值去算的时候,顶点速度v_i 以及 current space 下的R_r_i 检测完都要取平均,带入之后计算。
第二点,我是简单写为restitution *= 0.5f;就可以了。要注意 U_T 和 U_N 要区分开。
由于Unity矩阵库无减法,我是这样做的:
Matrix4x4 K = new Matrix4x4(
K_minuend.GetColumn(0) - K_subtrahend.GetColumn(0),
K_minuend.GetColumn(1) - K_subtrahend.GetColumn(1),
K_minuend.GetColumn(2) - K_subtrahend.GetColumn(2),
K_minuend.GetColumn(3) - K_subtrahend.GetColumn(3)
);
minuend被减数,这里是被减矩阵;subtrahend减数。即我构造了俩矩阵,之后再直接用new和GetColumn方法构造。
同时矩阵库还没有常数乘以矩阵,我于是这样构造的K_minuend:
Matrix4x4 K_minuend = Matrix4x4.Scale(new Vector3(1.0f / mass, 1.0f / mass, 1.0f / mass));
K_minuend.m33 = 1.0f / mass;
注意m33一定要填上值,我之前就是这里忘记了,导致debug了很久。若不然对之后的Matrix4x4.Inverse会有影响。
还有四元数貌似没有叉乘,我是使用了四元数叉乘公式直接写的,在第三节课引入四元数有讲。
主要参考的PPT:
上图需要在Collision_Impulse函数中一条条对着写,注意要用到平均值去做计算,就需要把 Vi_new 和 后面的 Rr_i 都做替换。














 314
314











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









