







文章目录
~
一、弹簧系统
我们知道能量与做功的关系式:
E
e
n
d
−
E
s
t
a
r
t
=
−
W
s
t
a
r
t
→
e
n
d
=
−
F
⋅
(
S
s
t
a
r
t
−
S
e
n
d
)
E_{end} - E_{start} = -W_{start \rightarrow end} = -F \cdot(S_{start} - S_{end})
Eend−Estart=−Wstart→end=−F⋅(Sstart−Send)
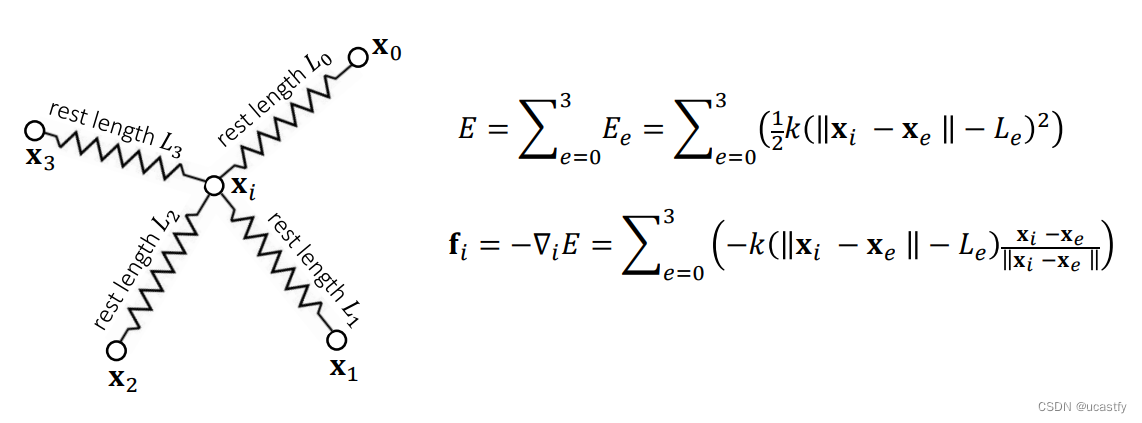
因此力是能量的负梯度:
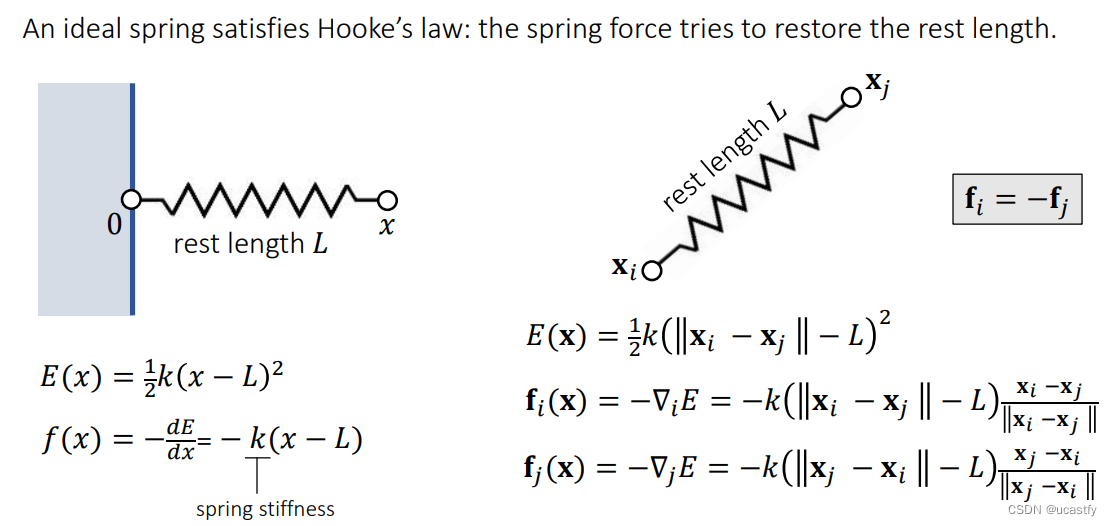
对有多个受力点的弹簧则可使用加和进行表示:
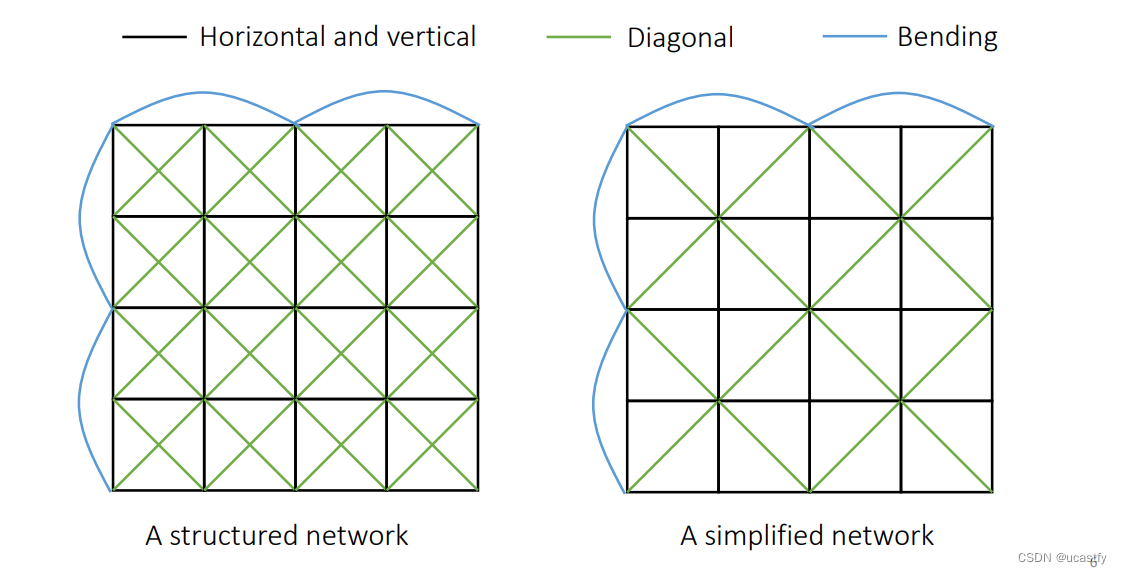
由此可以形成一个弹簧网格来表示衣服,横竖网格表示衣服的上下左右的移动,斜方格表示 45° 与 135° 的移动,而蓝色的网格则表示衣服可以轴向弯曲的移动。
但一般喜欢选用第二种错开的方式,即一部分 45° 一部分 135° ,这样 45° 和 135° 都可以兼顾,同时也可以让弹簧数量减少。
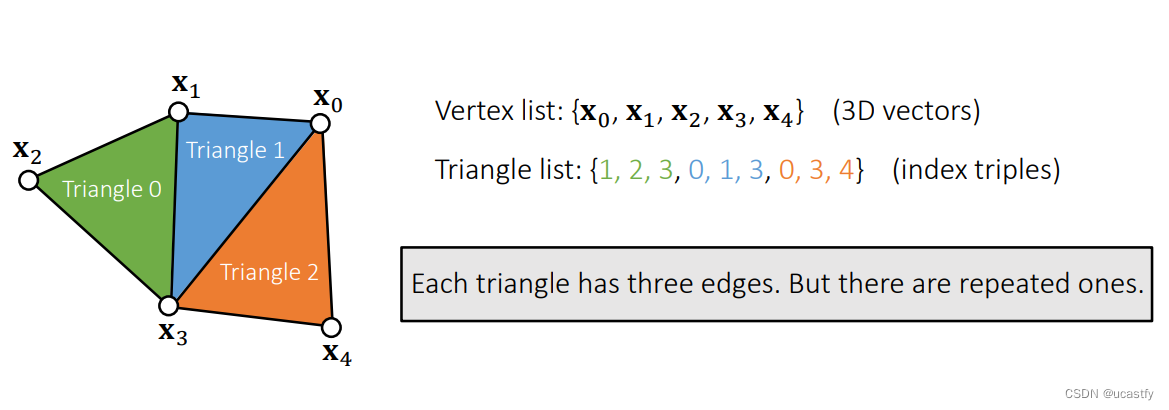
对于不规则的面料,一般使用不规则的三角网格表示,使用内部边相对的一个顶点连接来表示弯曲:
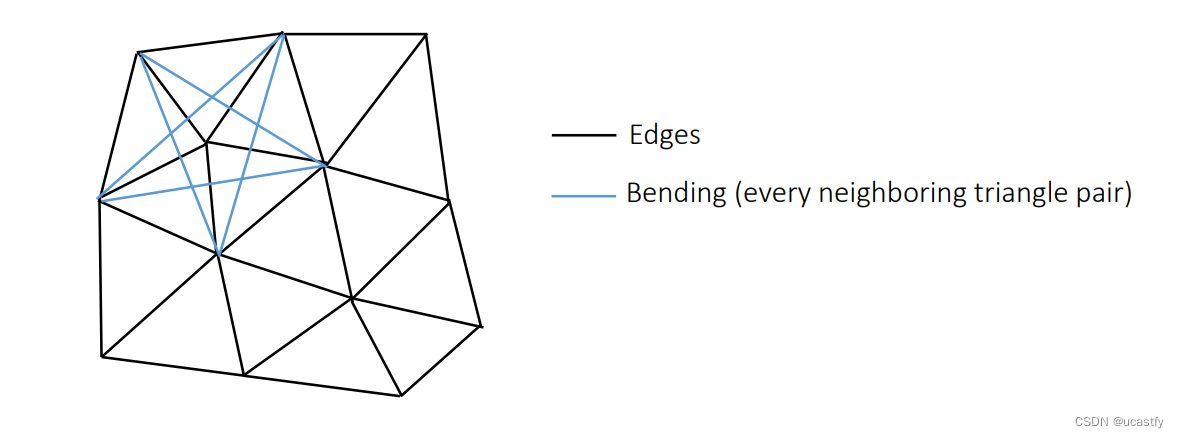
对网格的表示一般由两种成分组成,一个是顶点的信息,一个是每个三角形的索引。但如果只存储这两种信息,我们寻找网格的内部对边时,每个内部对边可能会被计算两次,因为对边的寻找依赖于内部边,而每个内部边会被两个三角形重复使用。
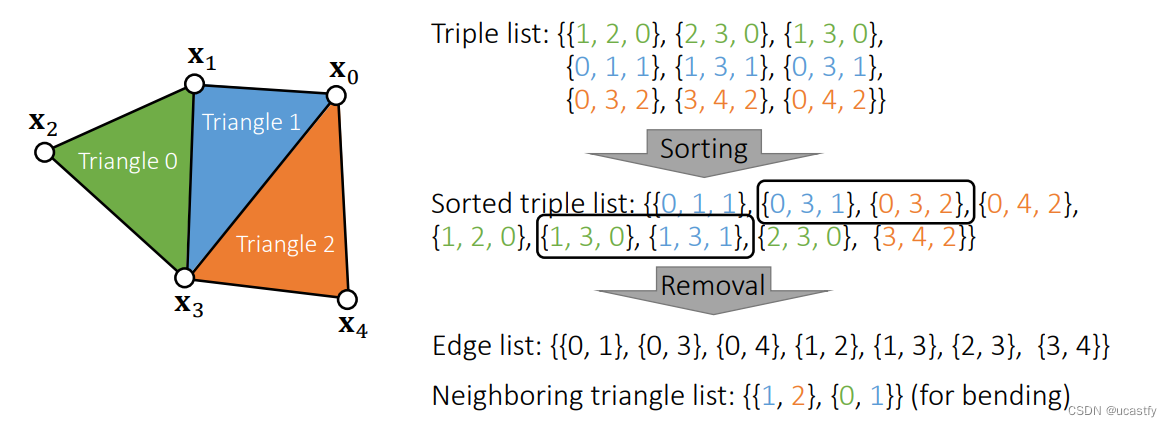
因此我们需要设定一种数据结构来寻找内部重复的边,使用一种三元列表的结构来存储边,前两个元素存储顶点索引,第三个元素存储边所在的三角形索引,这样对边结构一排序,重复的边就会相邻,从而可以找出相邻的三角形和不重复的边。
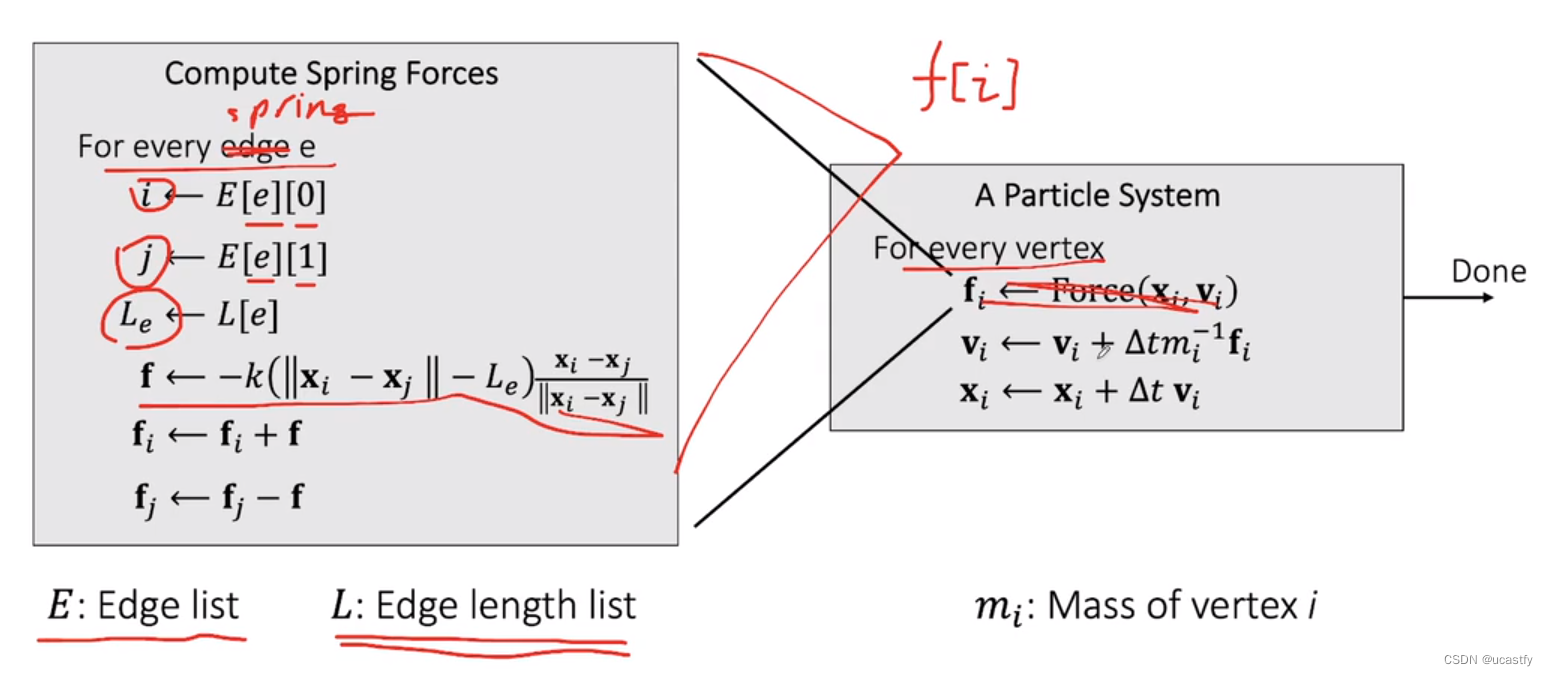
然后针对网格中的每一条边(也就是弹簧),遍历计算出每一个点的力,得到一个力的数组 f [ i ] f[i] f[i] ,再遍历每一条顶点,得到每一个点的合力 f i f_i fi
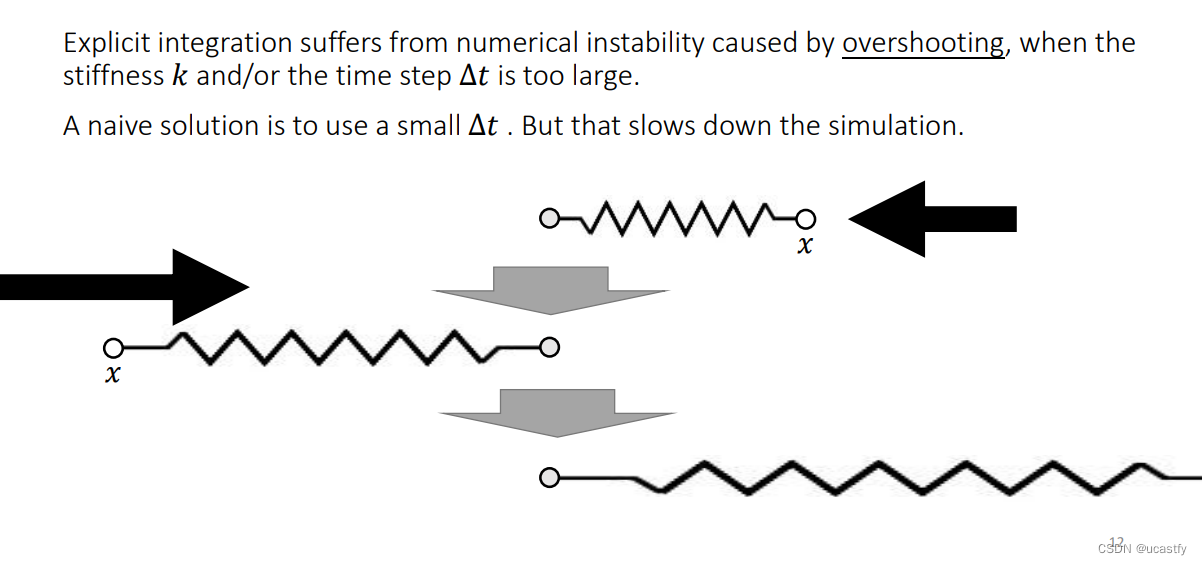
对于弹簧的显式积分,当我们把弹性系数 k k k 设置的过大时,可能一点位移就会产生很大的力,从而让该点位移很远的距离,以至于移动到了另一侧更远的距离,最后来回震荡以至于弹簧的端点超过了屏幕的范围。
因此使用显式积分容易产生数值不稳定性,他一般在 k k k很大 或者 Δ t \Delta t Δt很小 的时候产生,如果将 Δ t \Delta t Δt设置的很小则会影响模拟的效率。
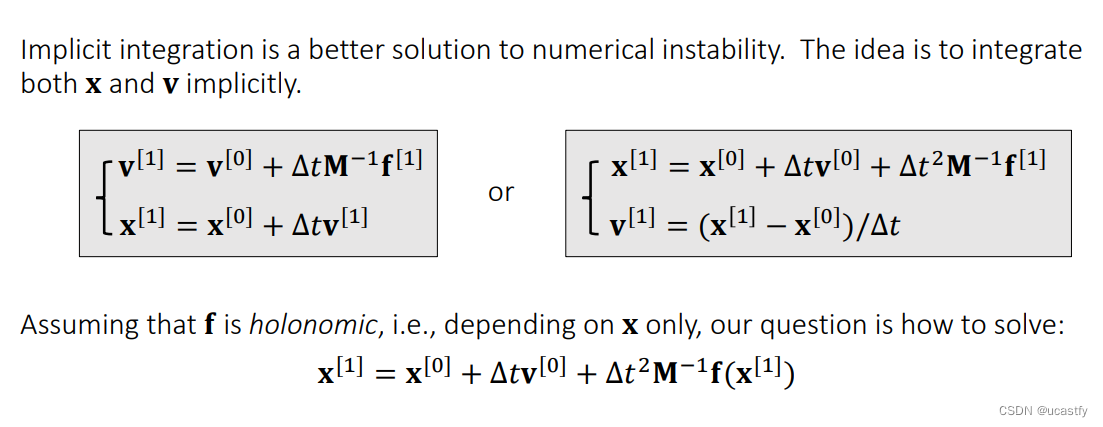
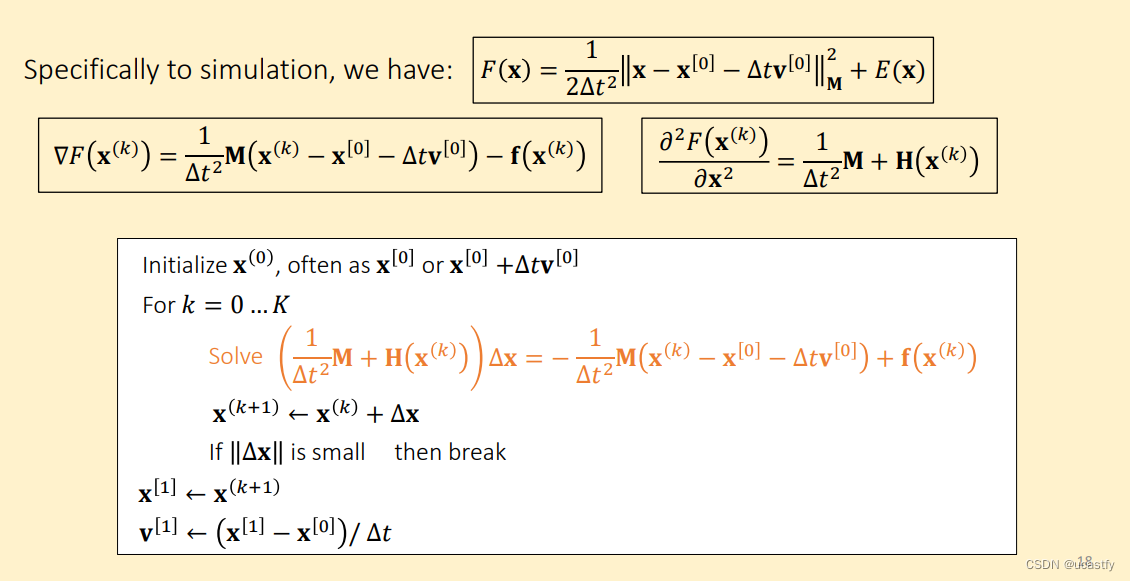
使用隐式积分法,由于我们对 [ 1 ] [1] [1] 时刻的速度和位移是受到 [ 1 ] [1] [1] 时刻的力 f [ 1 ] f^{[1]} f[1] 控制的,但我们目前只知道 [ 0 ] [0] [0] 时刻的速度和位移,所以得到的式子整体是一个隐式表达。我们需要假设任意时刻的 f f f 是只和当时的位移 x x x 有关的,因此两个式子的求解最终变为了对 x [ 1 ] x^{[1]} x[1] 的求解。
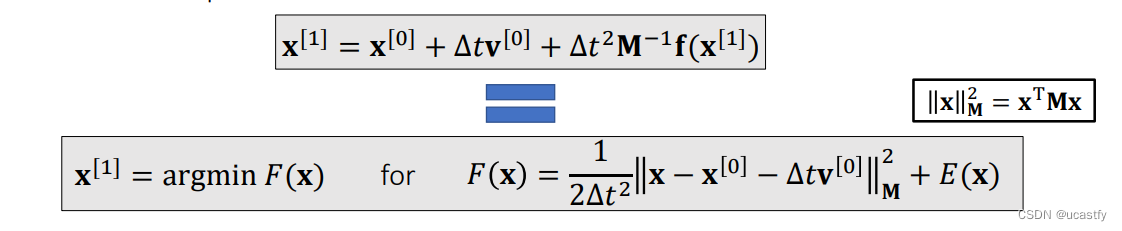
先转换一个视角看待这个方程,把它转换为优化问题,这样可以帮助我们理解模拟中的误差、优化方法、加速方法等,而解线性方程实际上可以理解为只是优化问题中的一个特例。对两边求积分得到 F ( x ) F(x) F(x) ,当 F ′ ( x ) = 0 F'(x)=0 F′(x)=0 时的 x x x 既为方程组的解,同时又是使 F ( x ) F(x) F(x) 为最小值的解。

其中
M
M
M 是质量矩阵,每一个对角位置表示对应点的质量:
为什么M是一个3Nx3N矩阵?
M
=
[
m
1
0
0
.
.
.
0
0
0
0
m
2
0
.
.
.
0
0
0
.
.
.
.
.
.
.
.
.
.
.
.
0
0
0
.
.
.
.
.
.
.
.
.
.
.
.
0
0
0
.
.
.
.
.
.
.
.
.
.
.
.
0
m
n
−
1
0
.
.
.
.
.
.
.
.
.
.
.
.
0
0
m
n
]
=
M = \begin{bmatrix} m_1 & 0 & 0 & ... &0&0&0 \\ 0 & m_2 & 0 & ... &0&0&0\\ ... & ... & ... & ... &0&0&0\\ ... & ... & ... & ... &0&0&0\\ ... & ... & ... & ... &0&m_{n-1}&0\\ ... & ... & ... & ... &0&0&m_n \end{bmatrix} =
M=⎣
⎡m10............0m2............00..............................0000000000mn−1000000mn⎦
⎤=
而
X
X
X 是一个
R
3
N
R^{3N}
R3N的列向量,存储了之前所有的点信息:
X
[
1
]
=
[
x
0
x
1
.
.
.
x
n
−
1
x
n
]
X^{[1]} = \begin{bmatrix} x_0 \\ x_1 \\ ... \\ x_{n-1}\\ x_n\\ \end{bmatrix}
X[1]=⎣
⎡x0x1...xn−1xn⎦
⎤
由于梯度求导的形式为:
∇
f
(
x
)
=
(
∂
f
∂
x
)
T
=
∂
f
∂
x
T
\nabla f(x) = (\frac{\partial f}{\partial x})^T = \frac{\partial f}{\partial x^T}
∇f(x)=(∂x∂f)T=∂xT∂f
所以
[
∂
(
x
T
M
x
)
∂
x
]
T
=
2
M
T
x
=
2
M
x
(
M
是对角阵
)
[\frac{\partial (x^TMx)}{\partial x}]^T = 2M^Tx = 2Mx ~~(M是对角阵)
[∂x∂(xTMx)]T=2MTx=2Mx (M是对角阵)
~
1、Newton迭代法
对于隐式方程的求解,我们可以使用牛顿迭代法,当函数具有利普希茨连续性,即函数可以被两条直线夹逼时,牛顿法收敛。
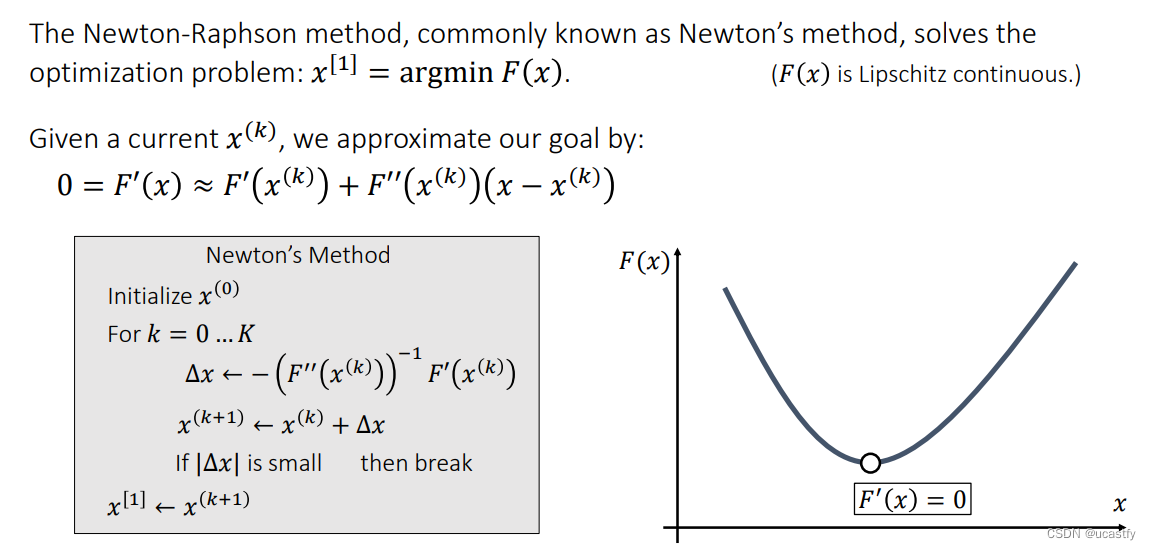
经过多次迭代后,牛顿法收敛到其中一个解。
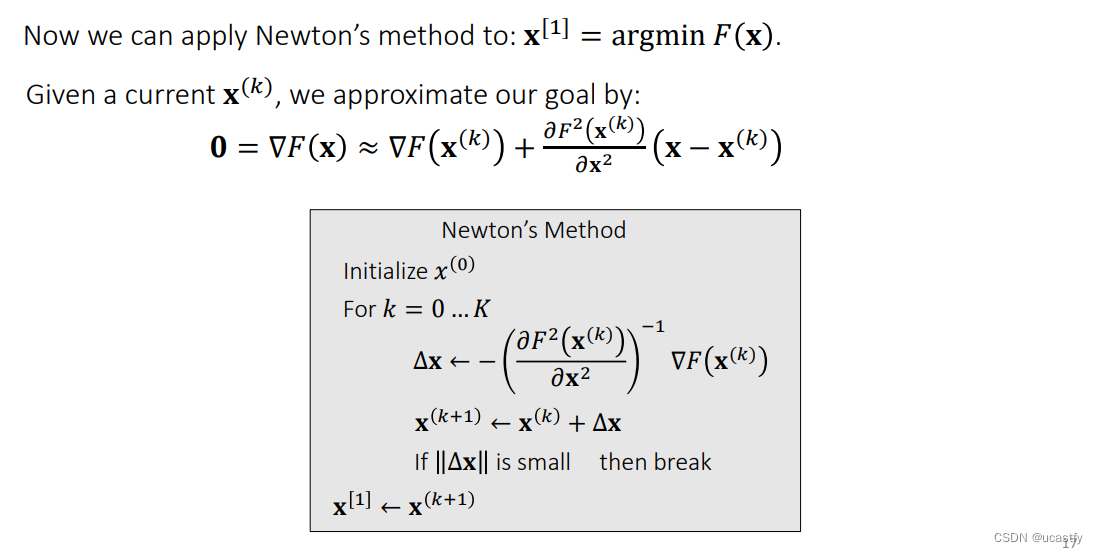
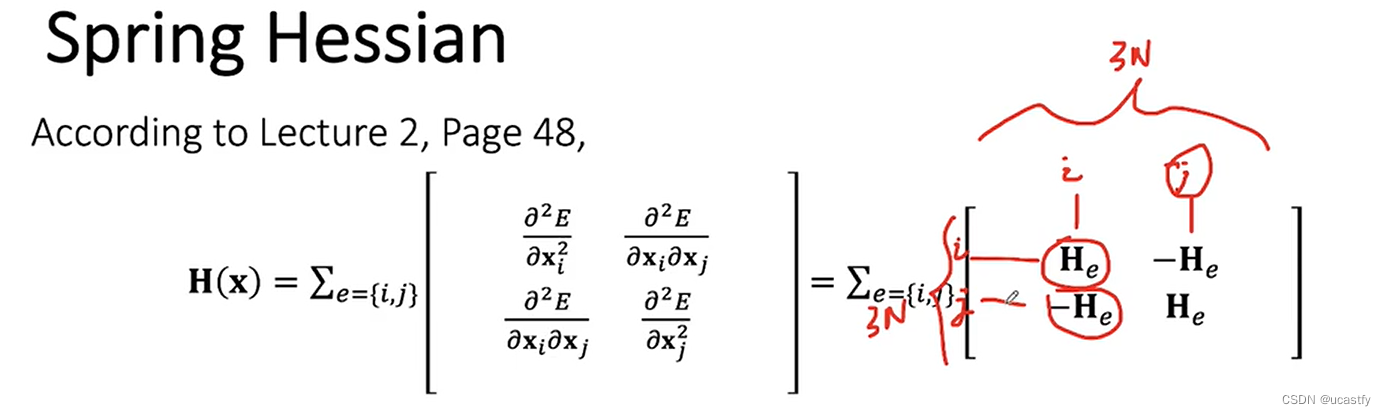
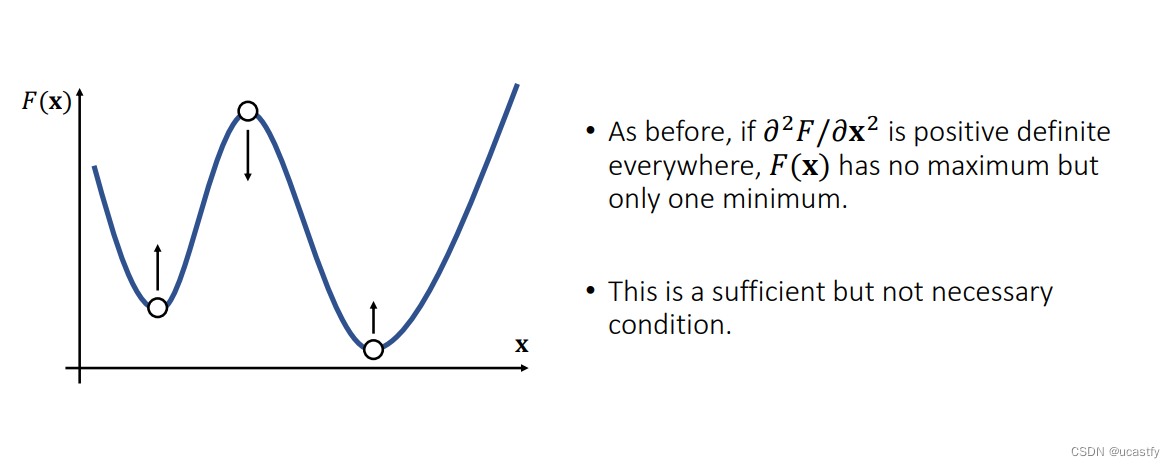
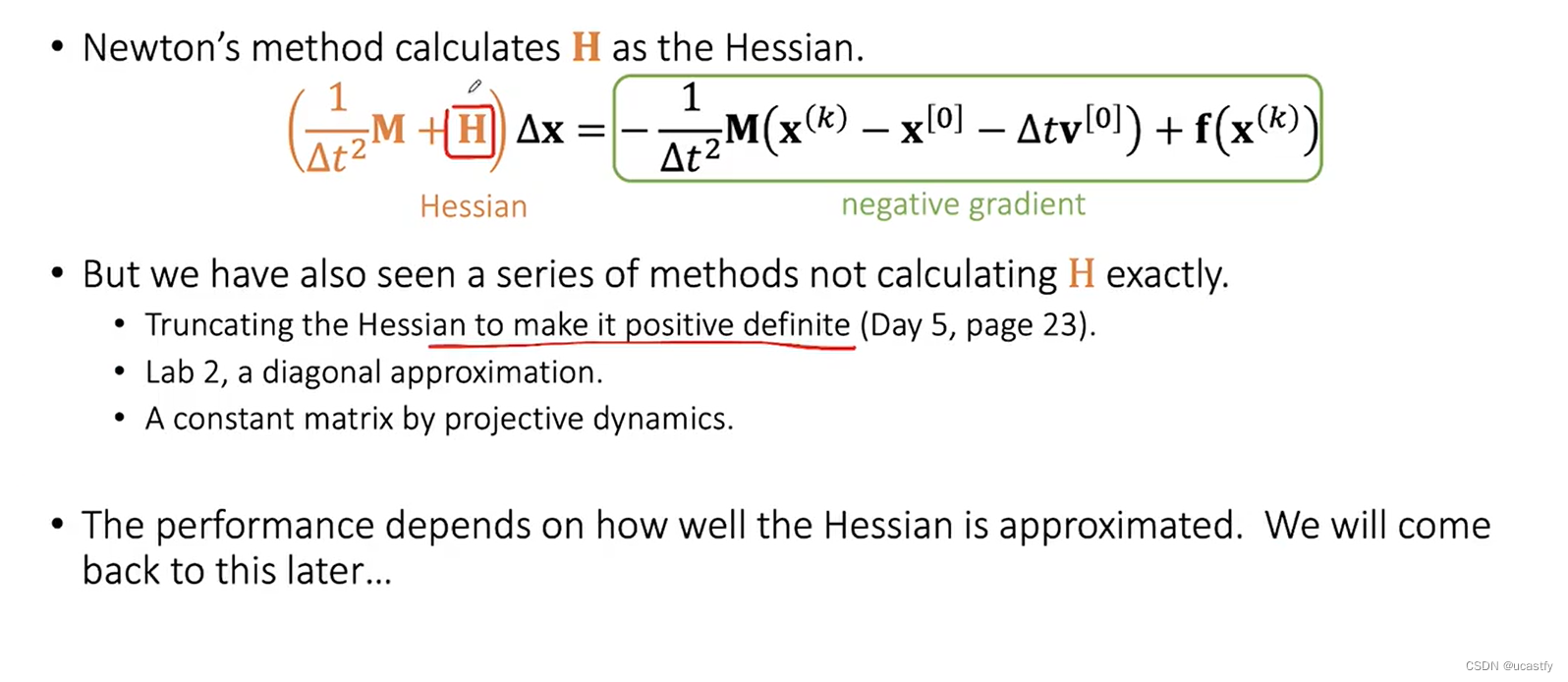
E E E 则表示了与位置 x x x 有关的势能, E E E 的负一阶导数为 F F F, E E E 的二阶导数为可以类比于弹簧的弹性系数。
因此我们需要求解黄色部分的方程,我们需要判断 H e s s i a n Hessian Hessian 矩阵的正定性,这有助判断我们的解是否是唯一的
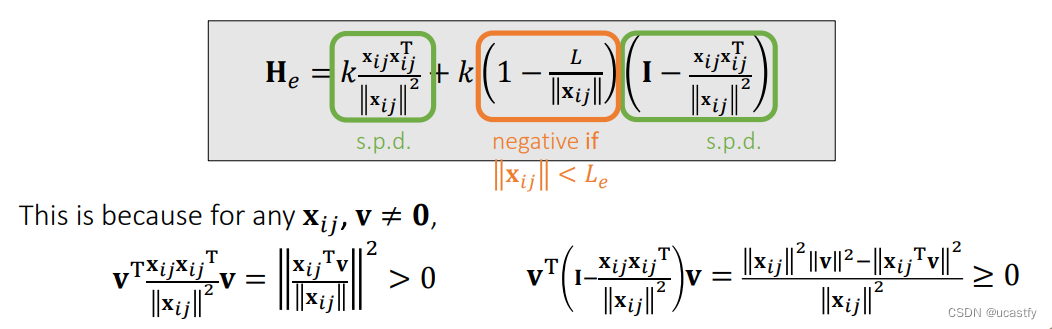
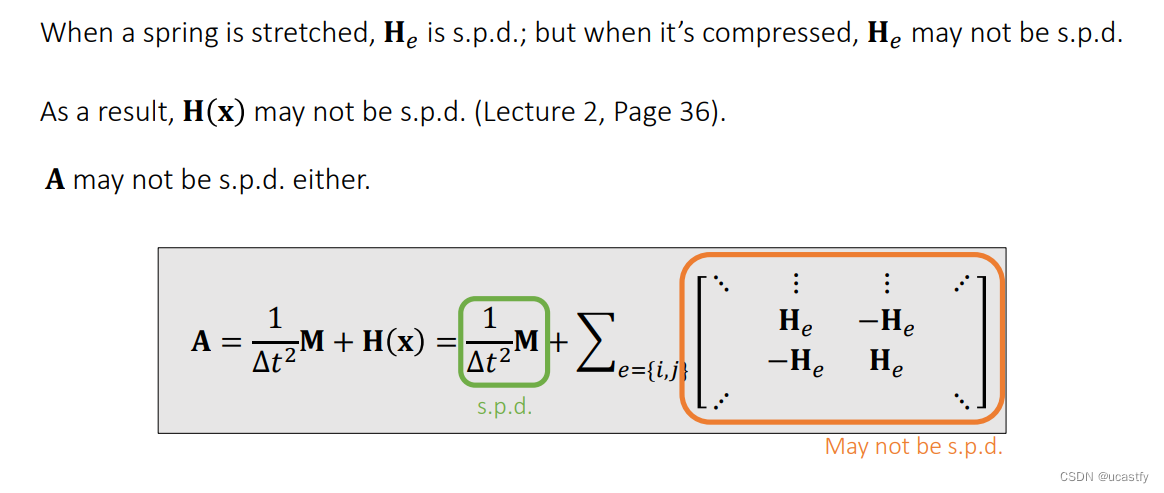
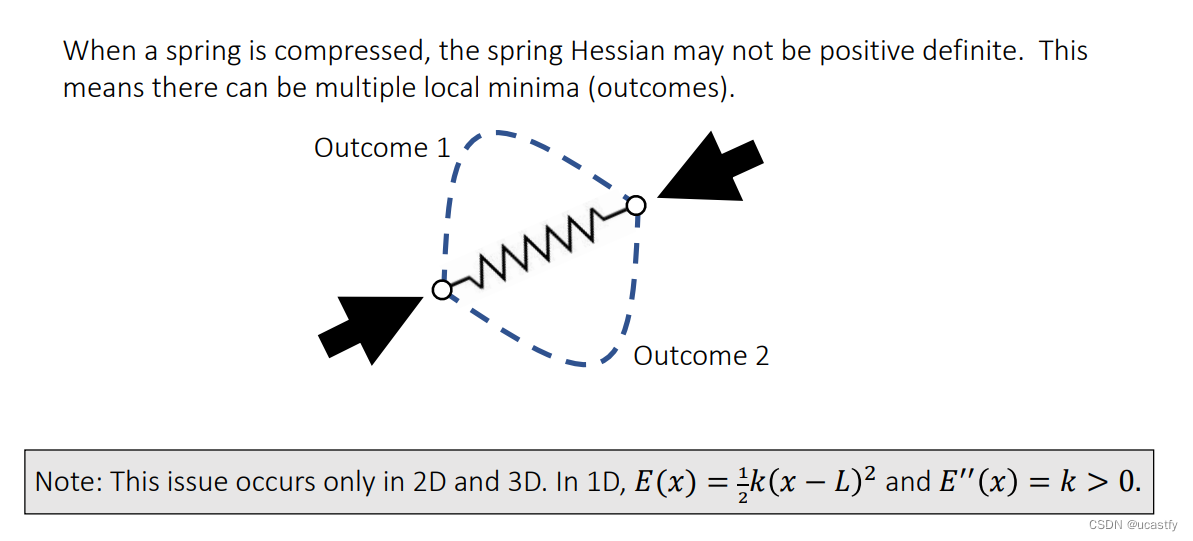
我么可以看到当弹簧压缩的时候, H e H_e He 可能会不正定,导致最终的 H ( x ) H(x) H(x) 不正定,同时导致 A A A 也可能不正定,矩阵的正定类似于二阶导数,我们知道函数的二阶导数大于0,代表有最小值没有最大值, H e s s i a n Hessian Hessian 矩阵同理。
当 A A A 正定,我们就有唯一解,但是有唯一解的时候不一定就是正定的。例如 Δ t \Delta t Δt 越小越正定,对应的就是我们时间片段越小,意味着每次的变动只动一点,那么模拟起来就越稳定。所以我们也可以推断在拉伸的时候,我们整个系统比较稳定,因为一定是正定的,但压缩的时候就有可能导致 H e s s i a n Hessian Hessian 不正定。
对于非正定可能会导致的多个解,在现实生活可以理解为压缩弹簧,弹簧蜷起来的状态一个往上,一个往下。但是这个问题不会出现在一维,因为弹性系数一定大于0.
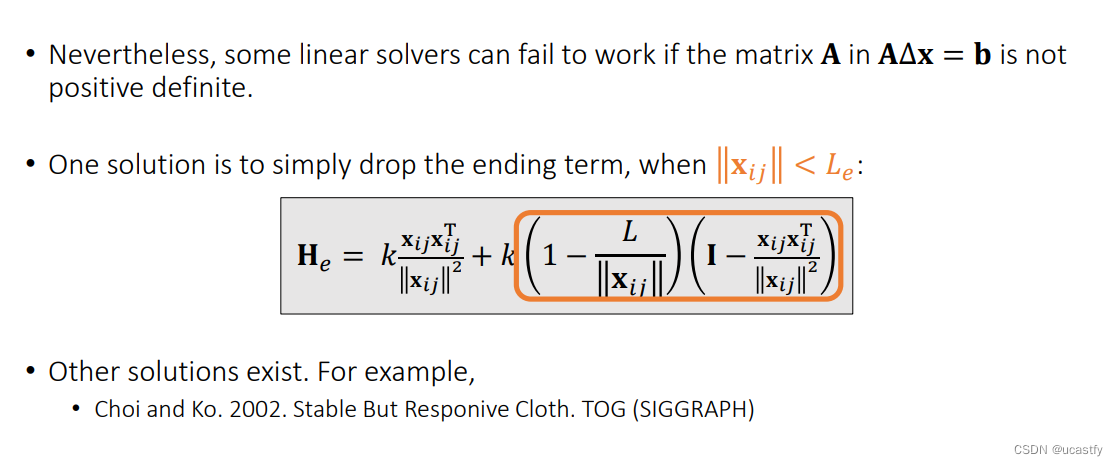
在实际中,正不正定对于模型的影响还是次要的,主要影响的还是算法上的使用。为了让 A A A 保持正定,有一种方法是把不正定的部分直接删除。
~
Jacobi Method
解线性系统分为直接法和迭代法。
直接法对 A 的要求小,适合在 CPU 上做,有一定内存开销。
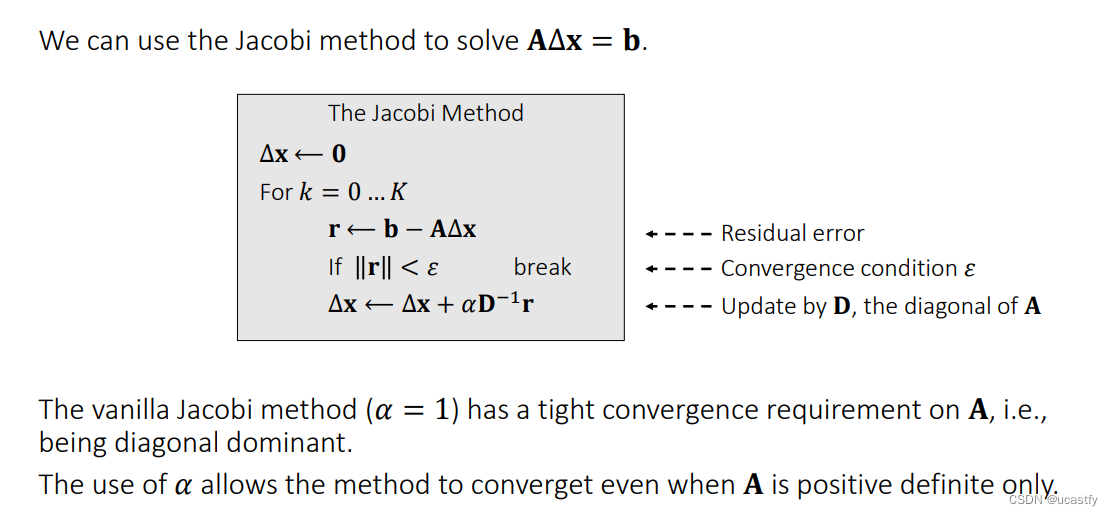
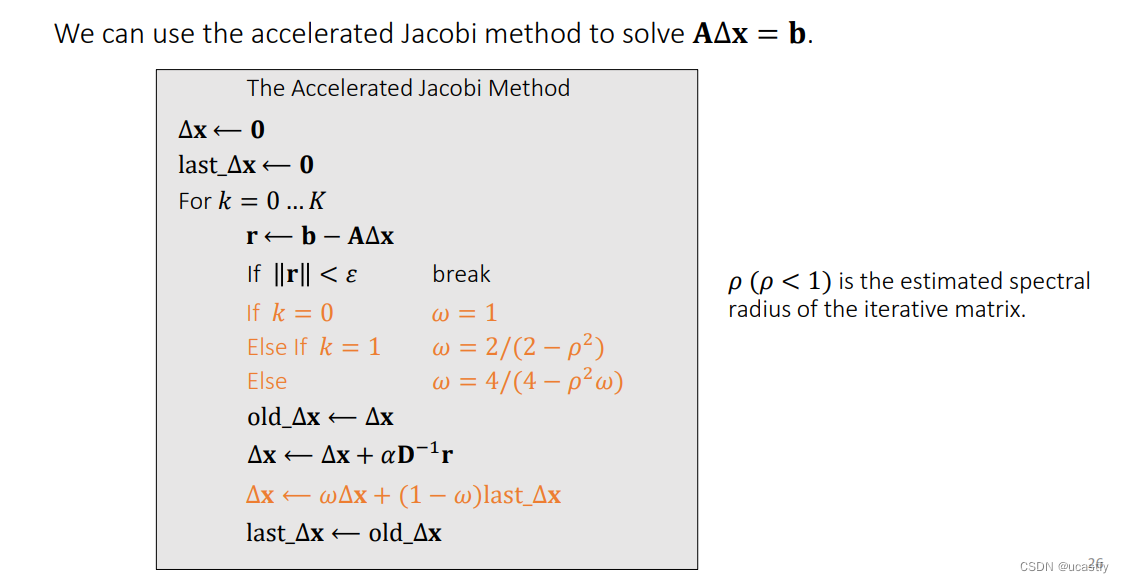
迭代法对 A 有一定的要求,例如要求 A 正定,但可以在 GPU 上实现,有一些加速方法。 J a c o b i Jacobi Jacobi 就是一种迭代法。
使用 J a c o b i Jacobi Jacobi 方法来解线性方程,前面的 α α α 一般在对角占优的时候取1。引入 α α α 来保证解法可以用于更多的情形。
用切比雪夫法加速 Jacobi 方法的求解速度。
记录一些课程提问:
⇒ \Rightarrow ⇒用能量优化的思路做刚体?
能量优化主要还是用于弹性体、有限元以及衣服模拟,刚体较少。
⇒ \Rightarrow ⇒布料模拟的解有解析解对照或者benchmark吗?
弹簧系统的一维作为简谐振动可能有,二维三维可能没有
⇒ \Rightarrow ⇒有考虑到弹簧的弯曲吗?
没有考虑,这里的弹簧只考虑了两个点的相对位置,这也导致了弯曲模拟的很多问题
⇒ \Rightarrow ⇒隐式积分的泰勒展开线性化和这里的最优化问题是等价的吗?
应该是等价的,等价到里面的线性方程求解
⇒ \Rightarrow ⇒质点质量可以不同吗
一般来说是先求一个三角形,将三角形的质量分到三个顶点上去,从而得到每个点不同的质量。
⇒ \Rightarrow ⇒迭代法求解 支持的维度比直接法更大?
是的,因为直接法有内存开销的问题
⇒ \Rightarrow ⇒矩阵直接求逆会不会有无法求解的情况
应该不会,由于 H ( x ) H(x) H(x) 是奇异的,前面的 M M M 大概率也是奇异的,只要矩阵不存在奇异值为0的情况,就是可逆的
~
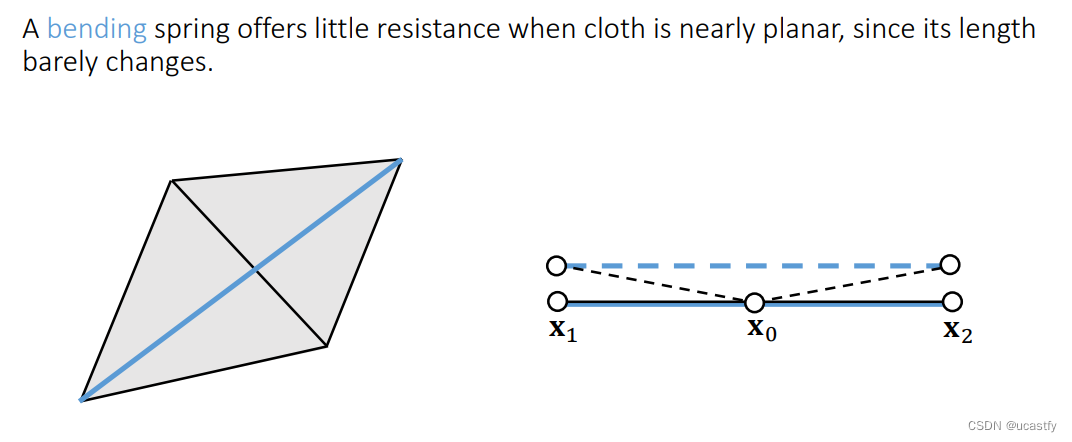
2、Bend Model
当弹簧只是产生了一个很微小的弯曲时,它的位移可能只是发生了很小的变化不足以产生对应的抵抗力
~
~
Dihedral Angle Model
所以将弯曲的角度考虑进来,即通过二面角来表示力,其中 u i u_i ui 表示力的方向, f i f_i fi 表示力的大小。
使用二面角表示需要满足以下几个定义。其中 u 4 u_4 u4、 u 3 u_3 u3 上受到的力应该在 x 3 → x 4 x_3 →x_4 x3→x4 这个方向上为零,所以 x 3 、 x 4 x_3、x_4 x3、x4 的线性组合应该都是垂直于 x 34 x_{34} x34 这条边,由于 n 1 、 n 2 n_1、n_2 n1、n2 也是垂直于 x 34 x_{34} x34 的,所以 u 4 − u 3 u_4-u_3 u4−u3 应该为 n 1 、 n 2 n_1、n_2 n1、n2 的线性组合。
最后一个条件是因为合力要为零。
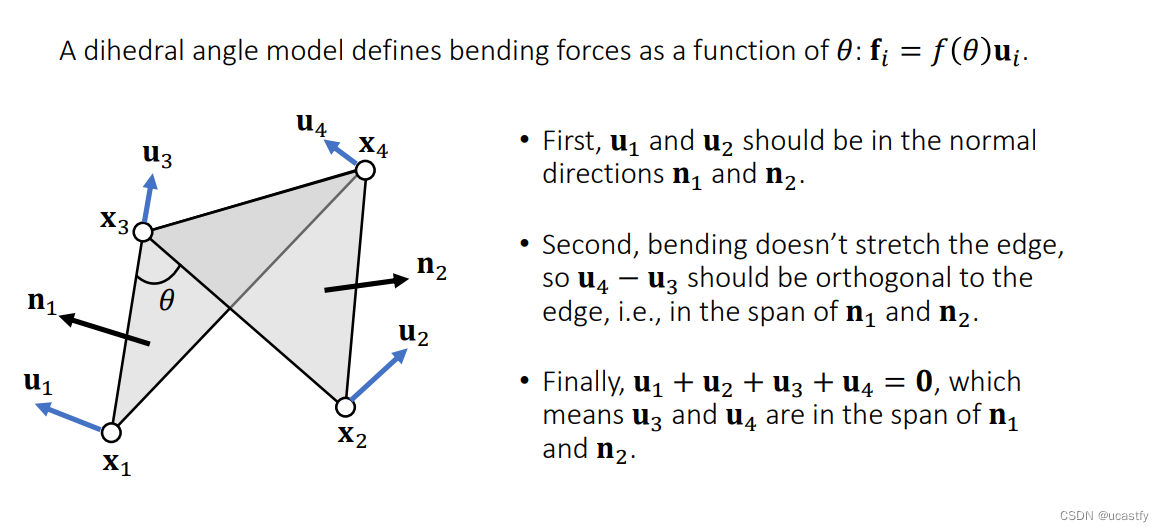
可以解出 u 1 、 u 2 、 u 3 、 u 4 u_1、u_2、u_3、u_4 u1、u2、u3、u4 的值
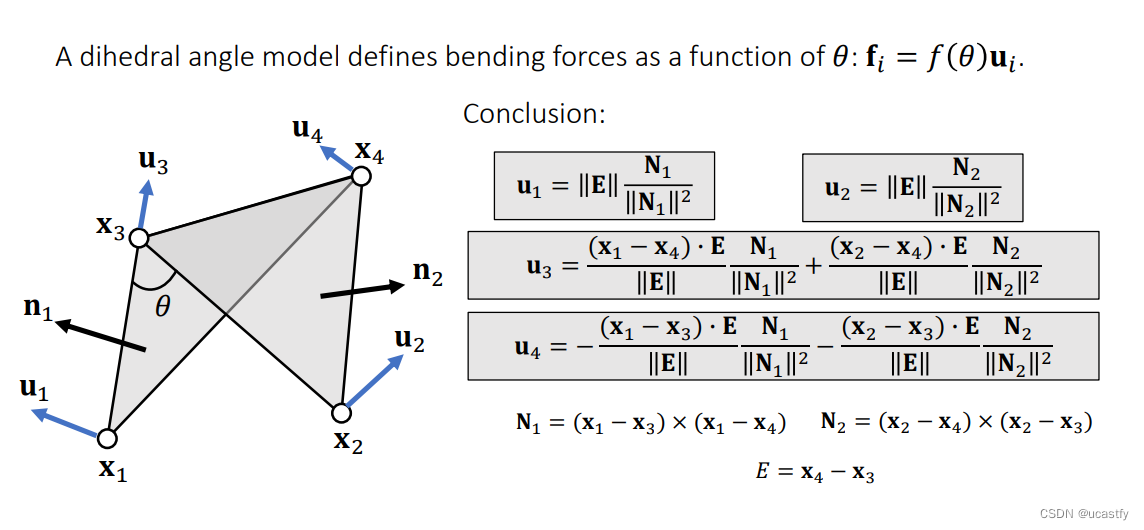
其中 θ 0 \theta_0 θ0 为初始的二面角度数, θ \theta θ 为弯曲后相对于弯曲前改变的度数,当初始两个面的状态为同一平面时,相当于非平面情况下的 θ 0 = 0 \theta_0 = 0 θ0=0。
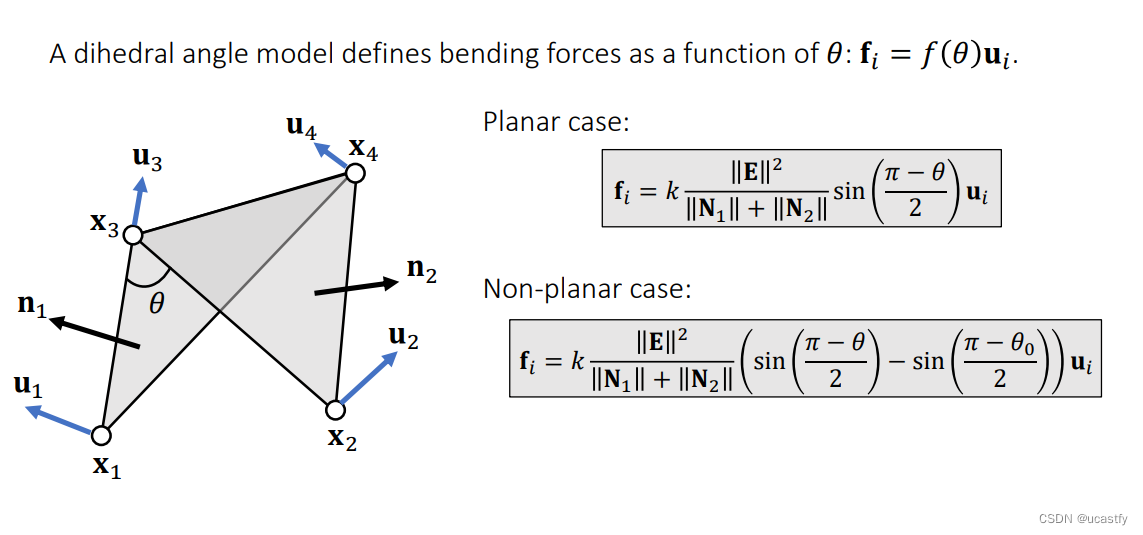
参考:Simulation of Clothing with Folds and Wrinkles(推荐阅读)
~
Quadratic Bending Model
使用二面角的方式只考虑到了力,没有考虑到能量,因此只适用于求显式积分,如果使用隐式积分则很难处理。
二次弯曲模型基于两个假设:(1)静止状态下两个三角形形成一个平面(2)顶点间的拉伸比较小,只考虑弯曲
其中 ∣ ∣ q T x ∣ ∣ ||q^Tx|| ∣∣qTx∣∣ 就是在计算两个三角形的 L a p l a c e Laplace Laplace,它代表了两个三角形之间的曲率,当曲率越来越大,能量就会越来越大,其中的 c o t cot cot 是从 L a p l a c e Laplace Laplace 算子推三角形的权重推出来的。

由于 Q Q Q 是一个常数矩阵,因此模型的梯度和 H e s s i a n Hessian Hessian 比较好算,但针对拉伸很严重的面料模拟就不太准确,如果初始状态不为一个平面也不太合适。
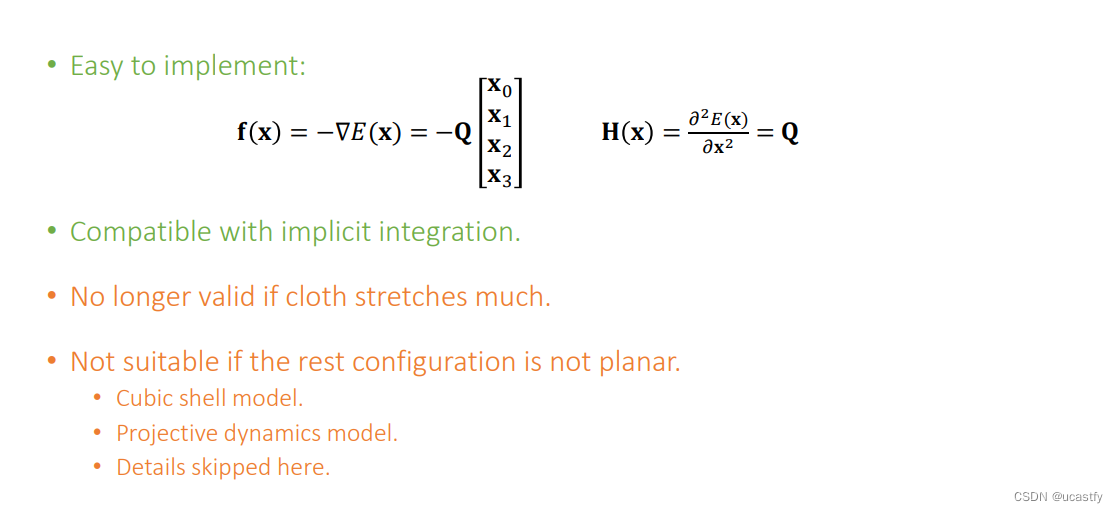
参考论文:A Quadratic Bending Model for Inextensible Surfaces(推荐阅读)
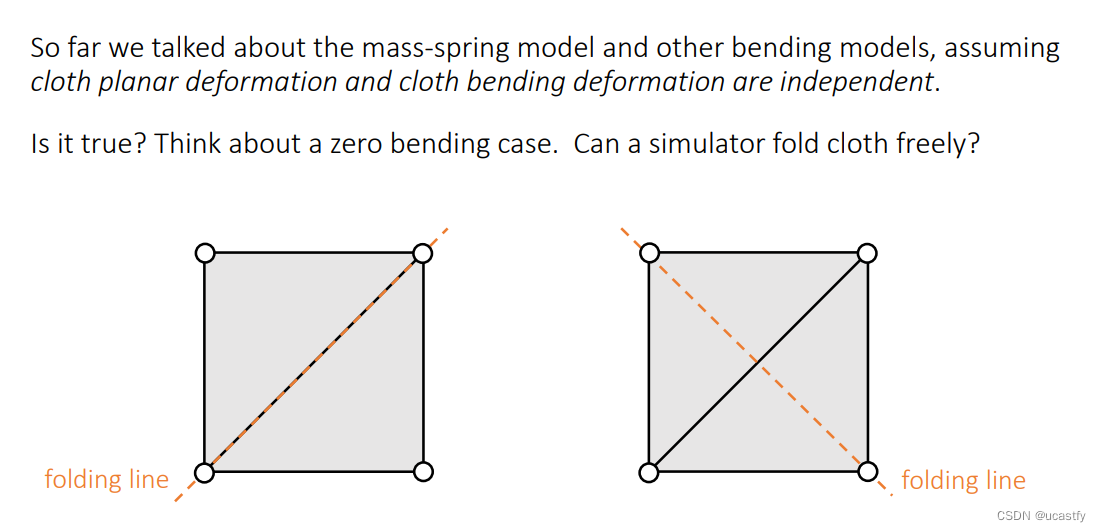
前面考虑了弹簧在拉伸的情况下各种弯曲的处理,这种考虑的前提是弹簧弯曲和拉伸是独立的,但有的时候也会遇到不能拉伸但可以弯曲的材料比如纸。
但用弹簧模型来模拟不能拉伸的材料时,弹簧的弹性系数非常大,沿着穿着弹簧的边弯曲也会受到很大的阻力,因为弹簧几乎不允许发生形变,也不会跟着弯曲,只要穿过弹簧翻折布料就会受到很大的弹力顶住两端。这被称为 Locking Issue。
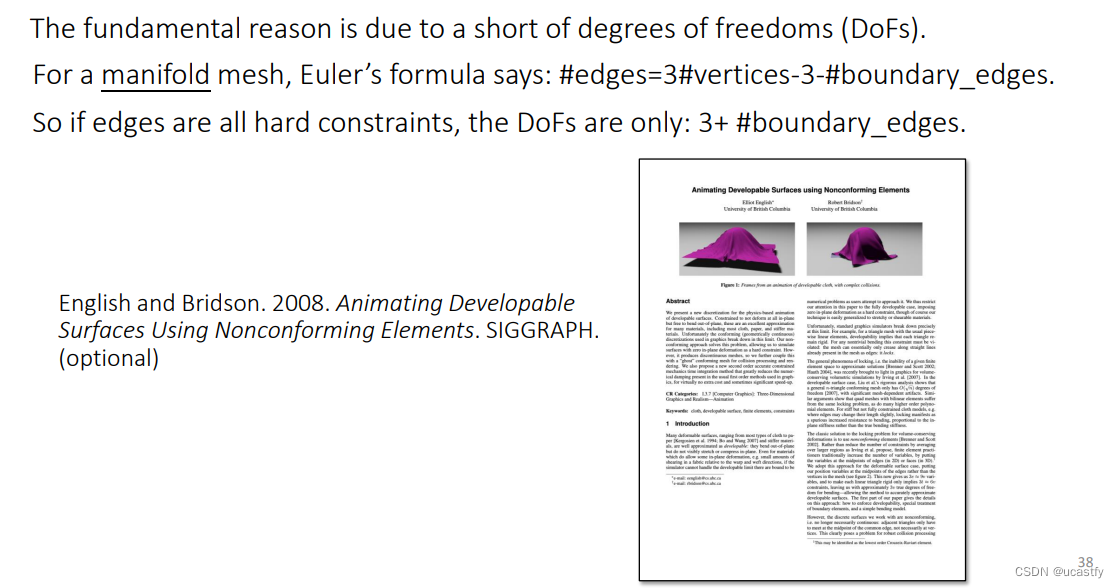
发生这种的原因是模拟中的自由度不够。
边的数量可以看作是约束的数量,依据欧拉定理:
E
d
g
e
s
=
3
∗
v
e
r
t
i
c
e
s
−
3
−
b
o
u
n
d
a
r
y
e
d
g
e
s
Edges = 3*vertices-3-boundary~edges
Edges=3∗vertices−3−boundary edges
弹簧模型中 Mesh 的顶点可以自由移动,每个顶点有3个自由度(x,y,z),Mesh 之间的边是约束条件,自由度就等于顶点数*3减边数。
D
o
F
s
=
3
∗
v
e
r
t
i
c
e
s
−
E
d
g
e
s
=
3
+
b
o
u
n
d
a
r
y
e
d
g
e
s
DoFs=3*vertices-Edges=3+boundary~edges
DoFs=3∗vertices−Edges=3+boundary edges
Locking 问题在弹簧弹性较弱、Mesh 的分辨率低的时候比较明显,那时候模拟就会发现布料弯不下去,因为所有的弹簧都撑在那里
分辨率高可以改善的原因并不是因为加了点导致的自由度高,而是因为顶点相对较密,而改善的,只是增加内部顶点,自由度和约束会同时增加互相抵消。
解决方法:
- 压缩的时候把弹性系数减小一点(可以理解为之前由于k太大轴在那,直接把k改小让它可以弯曲)
- 假定弹簧在一定变化范围内没有力,超过了一定的阈值才开始产生力
- 把自由度定义在边上(很难实际应用)
参考:Animating Developable Surfaces Using Nonconforming Elements
但以上方法也只能在视觉上减少这个问题,物理本质上还是没有改变。
~
~
二、约束限制
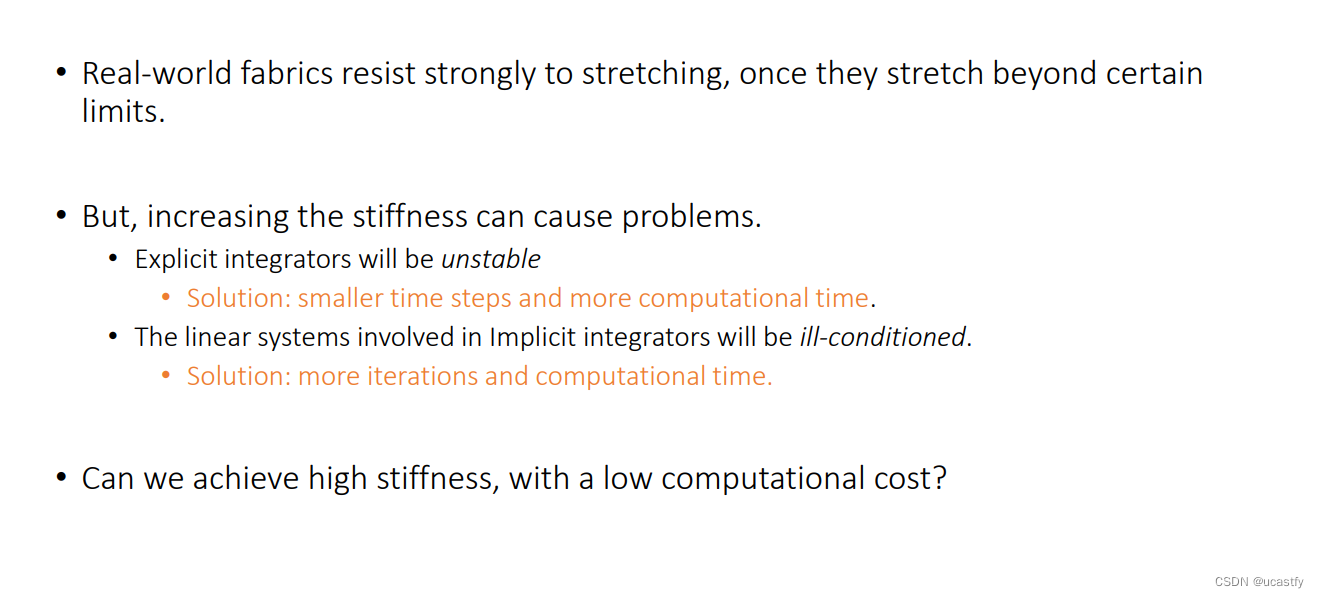
真实世界的布料拉伸到一定程度就会很难再拉伸了,如果只是单纯的增加弹簧系数 k k k,显式积分计算会增加很多的不稳定性,隐式积分计算会导致线性系统 i l l − c o n d i t i o n ill-condition ill−condition ,解决他们的办法都需要进行更大的计算量。
ill-condition:一般指问题的条件数非常大,从而比较难以优化,或者说需要更多迭代次数来达到同样精度
~
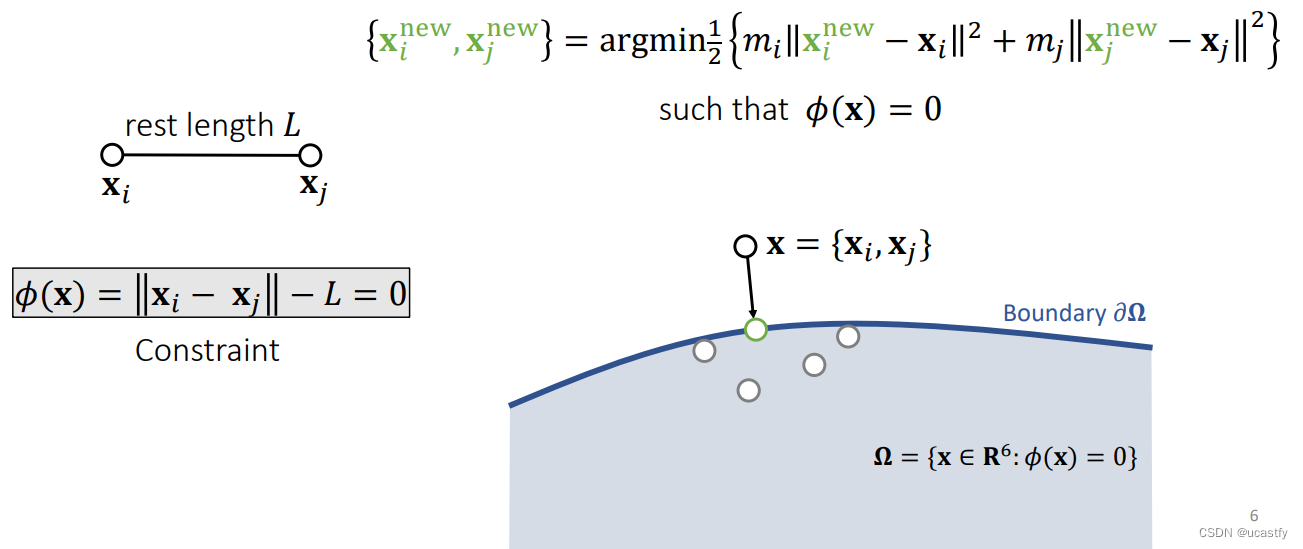
1、spring model
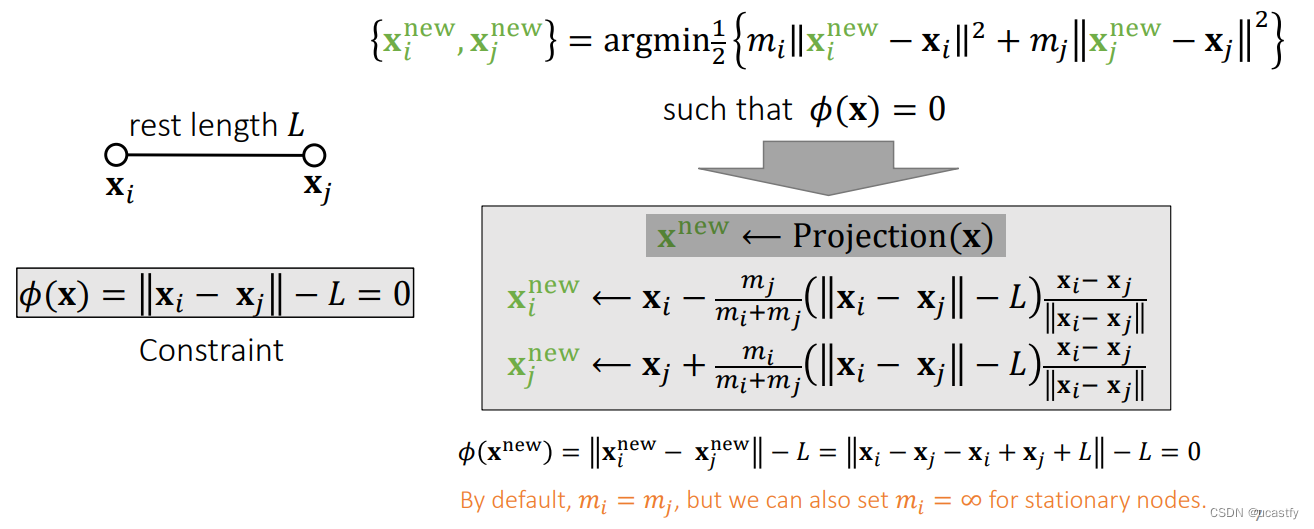
当弹簧的弹性系数无限大时,弹簧的长度成为了一个约束条件。可以定义一个6维的平面,使得平面上的点都满足弹簧长度不变( ϕ ( x ) = 0 \phi (x)=0 ϕ(x)=0),在这种约束下寻找新的点使得弹簧的形变量是最小的。
可以直接算出新的点坐标,直观上理解对于边而言质心是不变的, x i x_i xi、 x j x_j xj 则沿着这条边上的方向靠近或远离,而他们移动的距离取决于两个点相对的质量质量大挪的小,质量小挪的大。
新的点的距离仍然保持不变,对于不动点,可以直接让其质量设置为无穷大或者在运行的时候不进行更新。
~
~
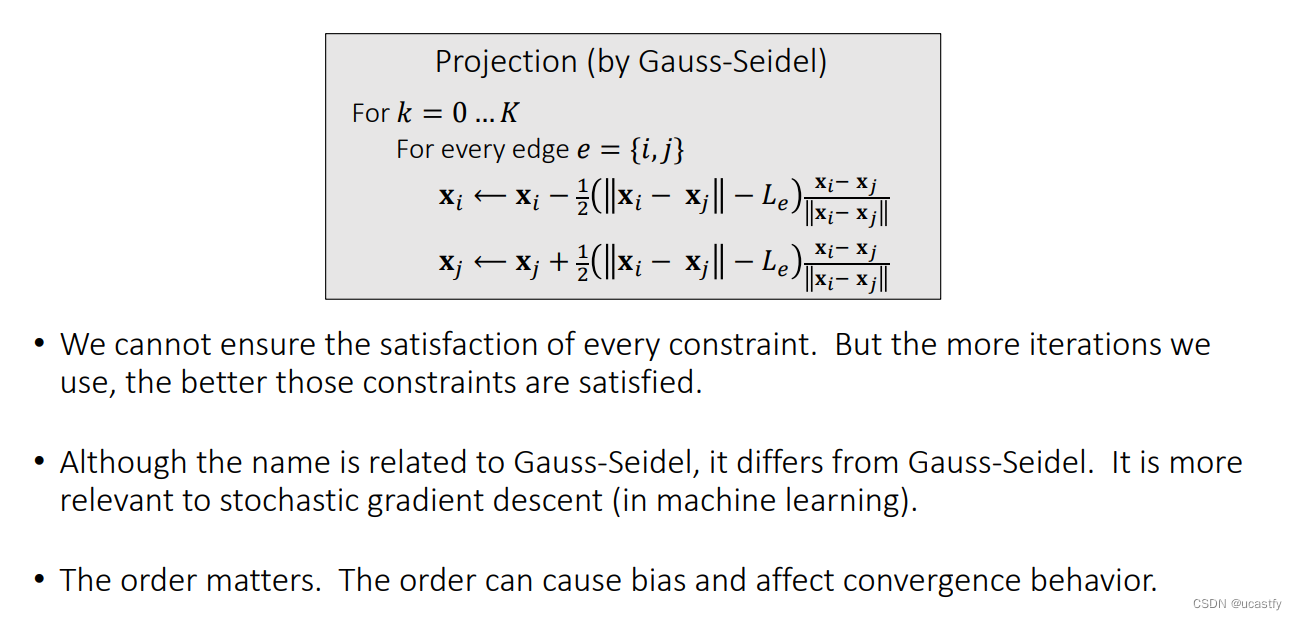
Gauss-Seidel Approach
对于多弹簧系统,我们可以对两根弹簧分别更新,不断迭代收敛到最后的两根弹簧的位置。
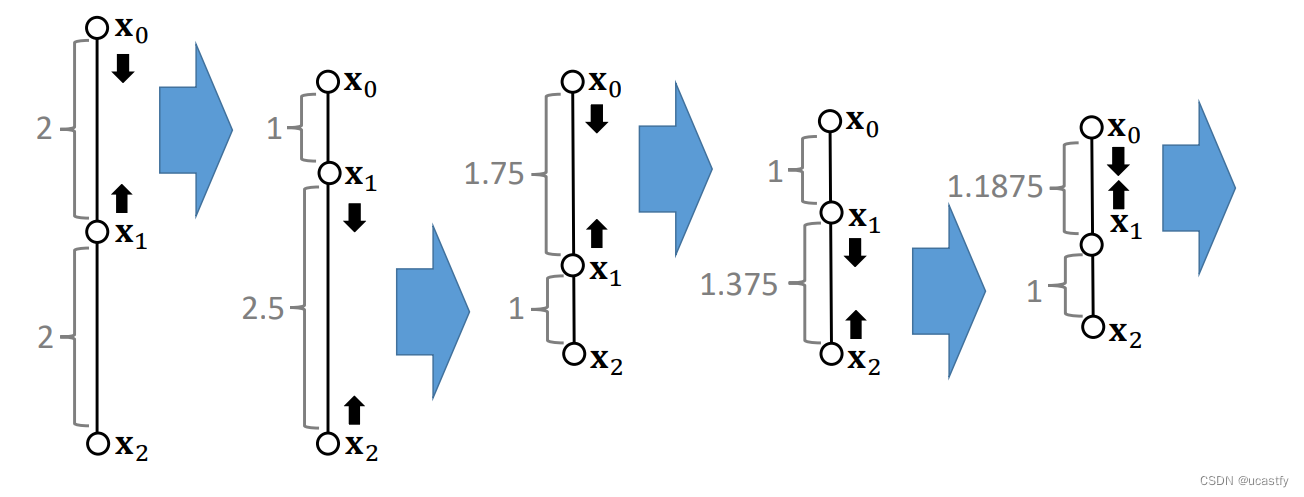
G a u s s − S e i d e l Gauss-Seidel Gauss−Seidel 类似于深度学习中的随机梯度下降 ( S G D ) (SGD) (SGD),迭代次数越多越稳定。对边处理的顺序会影响结果(可能导致最终结果偏向某一边)或者效率(不同顺序所用时间不同)
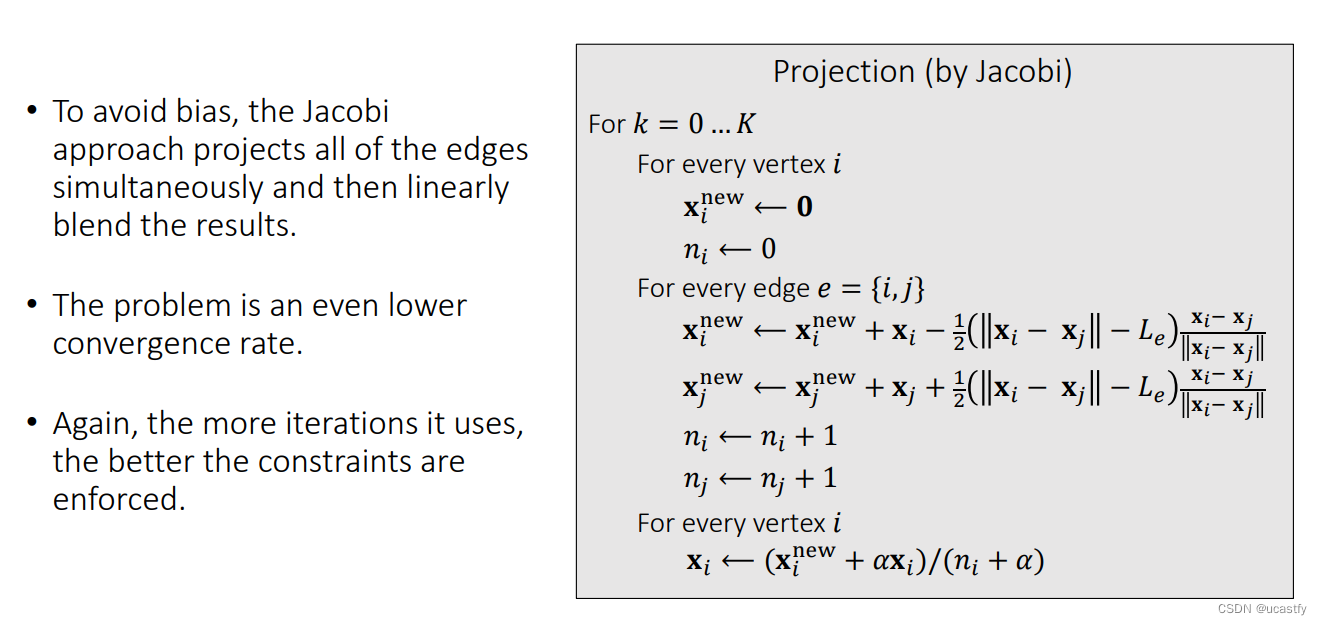
Jacobi Approach
为了减小运算顺序对结果的影响,以及为了更好的使用GPU并行计算(Gauss-Seidel也可以并行,但是要复杂一些,可以用一种叫着色法的方法对边进行分类处理)。
J a c o b i Jacobi Jacobi 方法针对每次对顶点的更新,都先保存下来,等到该顶点的所有更新都保存完毕以后,对得到的所有更新值取一个加权,就可以得到更新的最终结果。
n i n_i ni 存储了某个顶点需要更新的数量(因为顶点连着很多条弹簧,每个弹簧都会对同一点更新一次), x i n e w x_i^{new} xinew为每个弹簧对 x i x_i xi 的更新,这里的 α α α 是一个已知的参数,可通过调参来得到最优值。
J a c o b i Jacobi Jacobi 运行起来很容易,但是迭代次数要多一些。
~
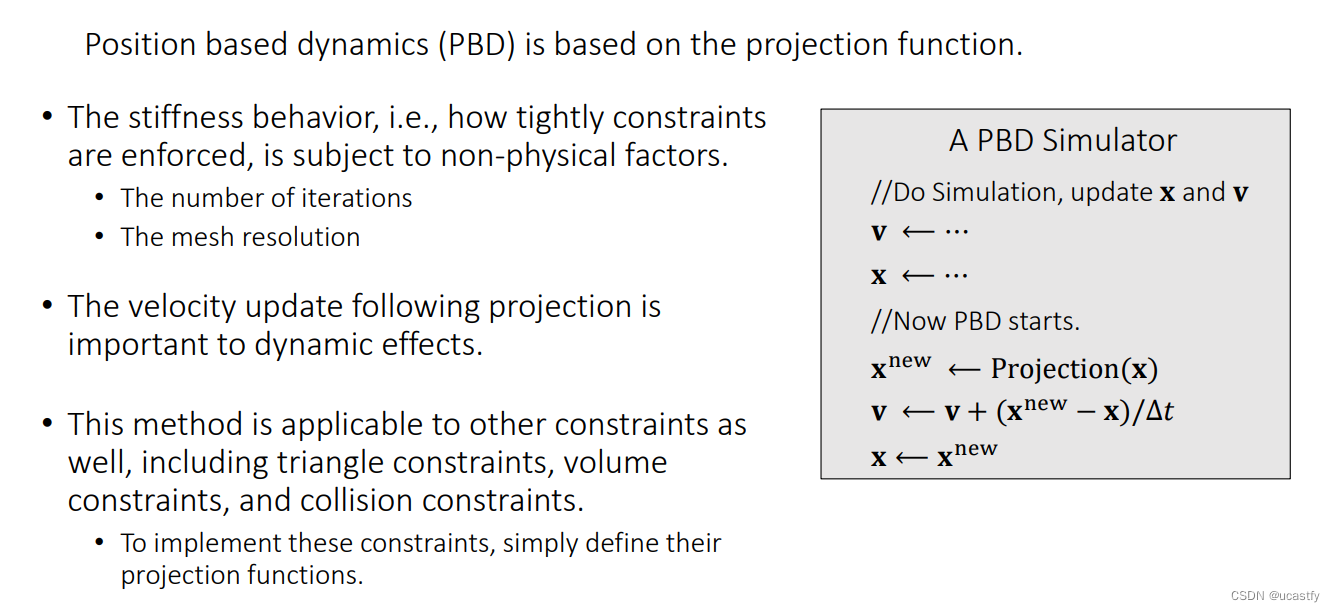
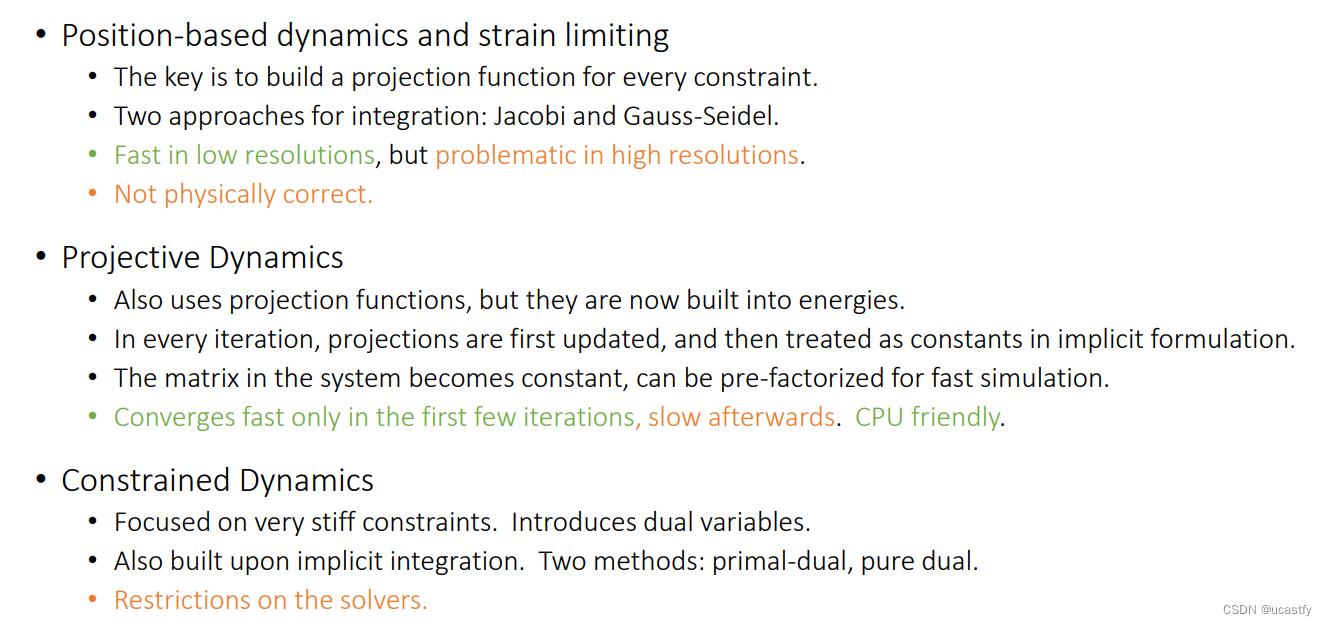
2、Position Based Dynamics(PBD)
PBD前半段类似 shape matching 让粒子自由运动,然后通过边长的约束来得到真实的 x x x、 v v v
PBD中没有涉及弹性的过程,只约束了边长,它的弹性体现在 迭代次数 和 网格分辨率。迭代数量越多,约束满足越好,就显得越有弹性,网格密度越小,越有弹性。
PBD中更新 v v v 有加号是因为被相加的 v v v 是更新过后的,所以要加上原来的速度。
PBD的约束也可以用于体积的约束或者是碰撞约束,关键是需要去定义一个投影函数。
PBD优点:
- 非常易于并行,易于实现
- 通用性强,弹性体甚至流体都可以使用
- 在不到1000顶点的网格还是可以以实时的效率去进行模拟
PBD缺点:
- 迭代结果收到网格数量和迭代次数影响,如果使用非常多的网格模拟,反而会导致无法拉伸,产生locking Issue,因此它是没有一个精确解的。所以PBD的方法是没有物理定义的。
- 在高分辨率的网格下效果下降会非常明显。
解决方法:
- Hierarchical approaches:使用一个网格构造低分辨率和高分辨率网格,然后在低分辨率网格上模拟一次,把模拟的结果在放到高分辨率网格上再做一次,再传到更高的分辨率上,层层递进来得到最后的结果。但容易产生抖动问题。
~~~~~~ 参考: Hierarchical Position Based Dynamics.
- 迭代加速,例如 C h e b y s h e v Chebyshev Chebyshev
PBD方法广泛用于现在的游戏中,由于它每次对内存的访问只有一个更新后的顶点坐标,所以可以提高模型的训练速度,事实上,目前对于矩阵的计算并不是影响计算速度的瓶颈,真实的速度瓶颈还是在内存访问上。
~
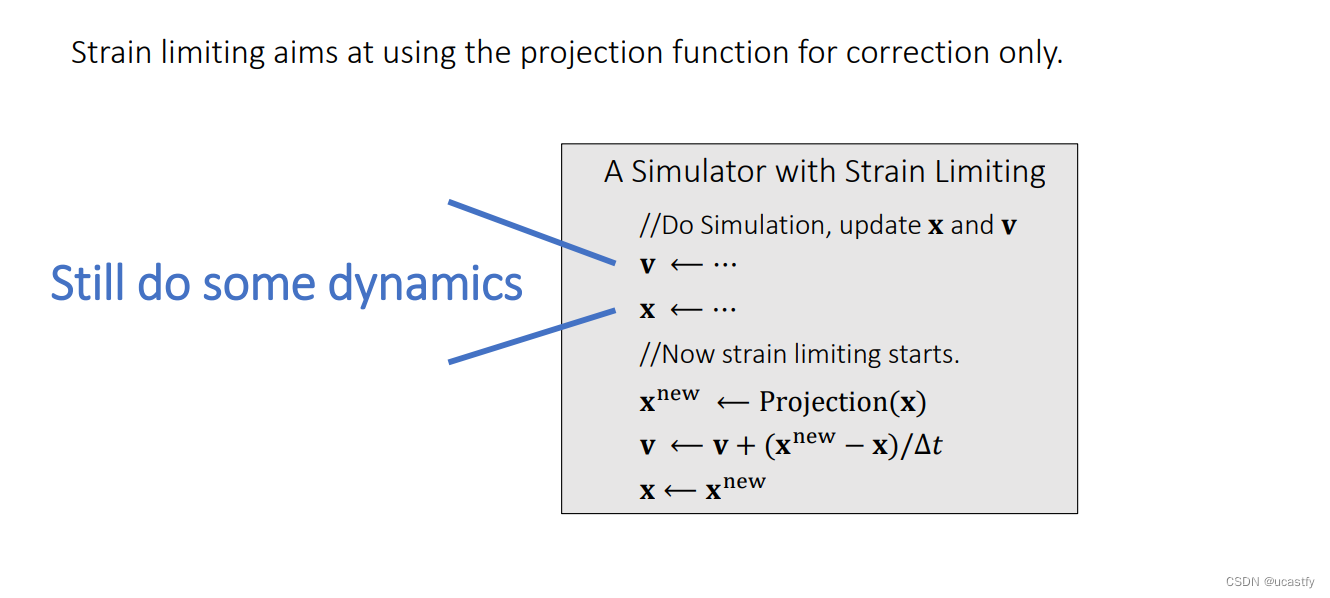
3、Spring Strain Limit
为了减轻投影函数对模型的负担,让模型可以有一些物理含义,因此考虑继续做正常模拟(例如隐式积分、有限元),但是在模拟过程中加入一步防止产生大形变。
在 S p r i n g S t r a i n L i m i t i n g Spring~Strain~Limiting Spring Strain Limiting 模型中第一步仍然做一些模拟的过程(弹簧、有限元等),而后面的第二步只是做一些约束,让模拟更稳定,而不是完全靠后面的 S t r a i n L i m i t i n g Strain~ Limiting Strain Limiting 来做模拟。
首先定义一个弹簧的拉伸比,弹簧的压缩和拉伸都不超过比例范围即可,相比于PBD 的确定长度这个宽松了限制条件。
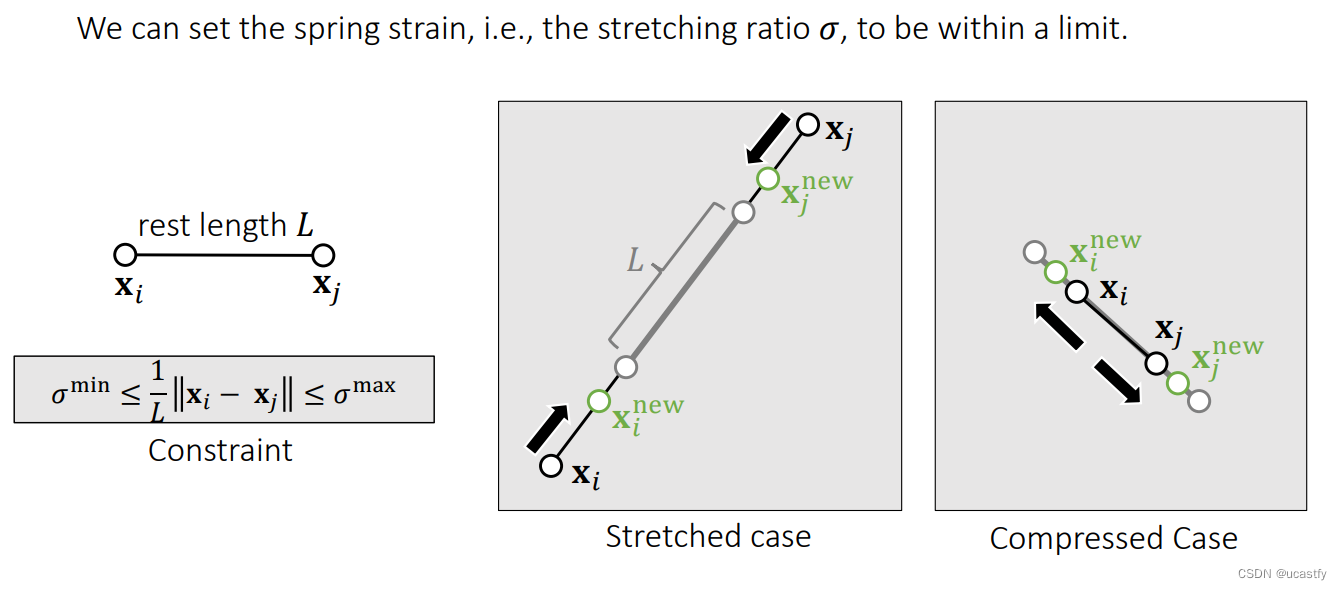
然后对弹簧进行限制,求出一个约束下的拉伸比,使用拉伸比来更新弹簧两端的位置
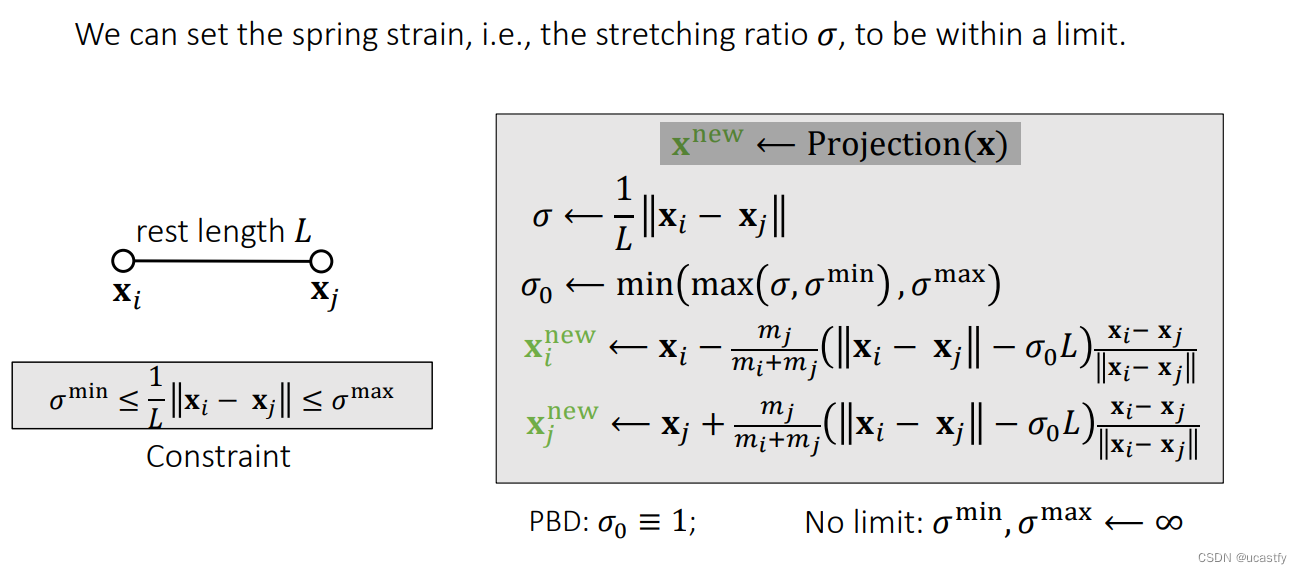
这种方法的本质是为了解决拉伸的问题,但也可以用于解决模拟一些布料拉伸到一定程度很僵硬的情况,或是解决一些弹性体拉伸到很大程度时产生的数值不稳定。
PBD可以看作是该方法的一种特例。
~
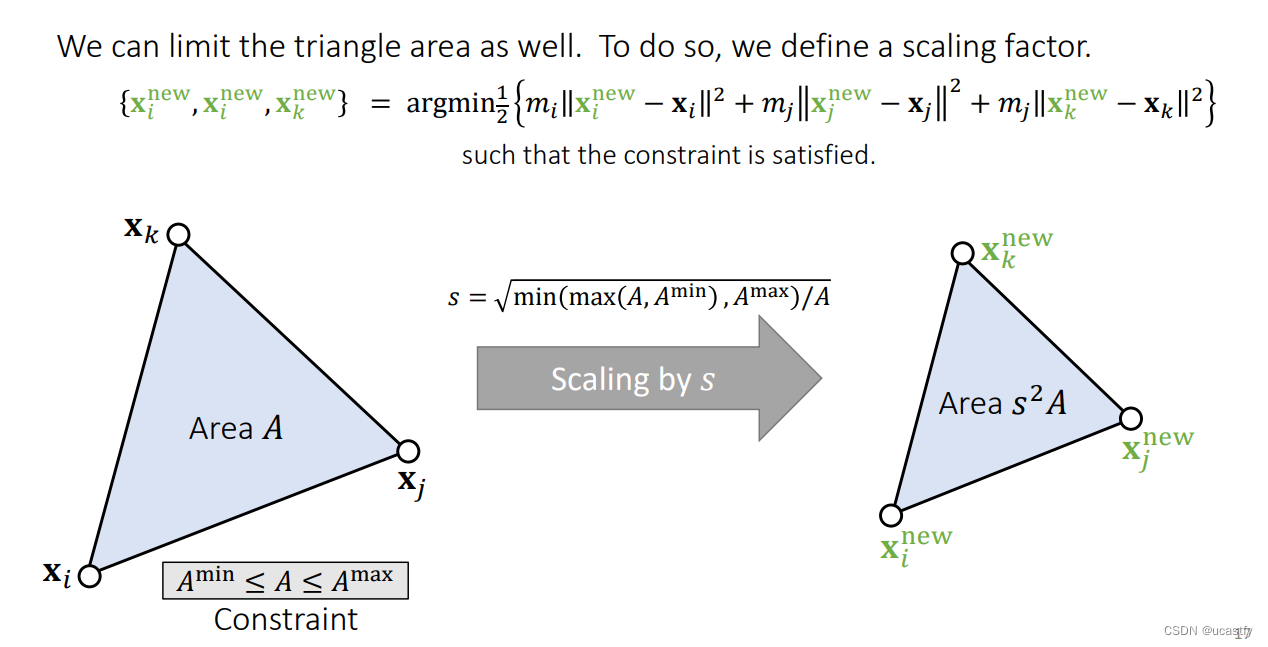
同理可对三角形的面积进行约束,求出一个面积的缩放比范围,在尽量保持质心不变的情况下,对三角形的三个点进行缩放,三个点缩放的程度依据点与质心的距离。
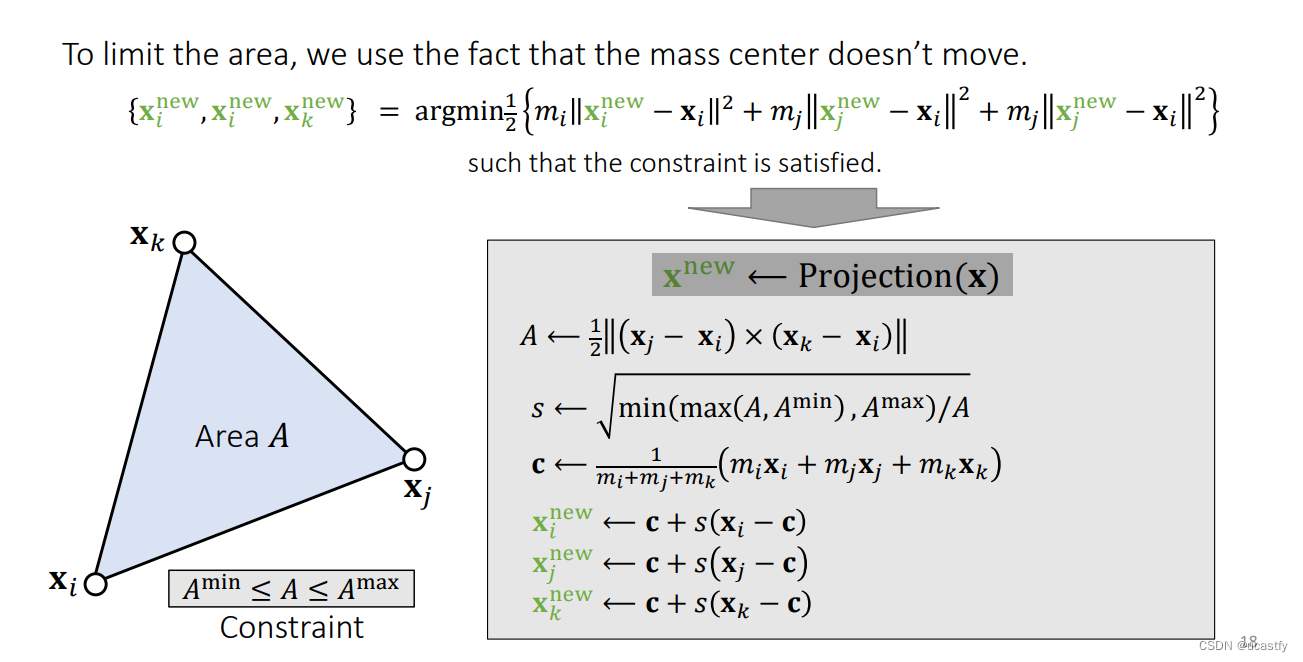
这里的 s s s 要开根号是因为依据面积公式,面积与点与点间的距离是平方关系。保持质心不变从数学上讲是为了满足顶点运动更少的要求,从物理上讲是为了让物体只有本地的运动,没有动量上的变化。
~
4、Projection Dynamics(PB)
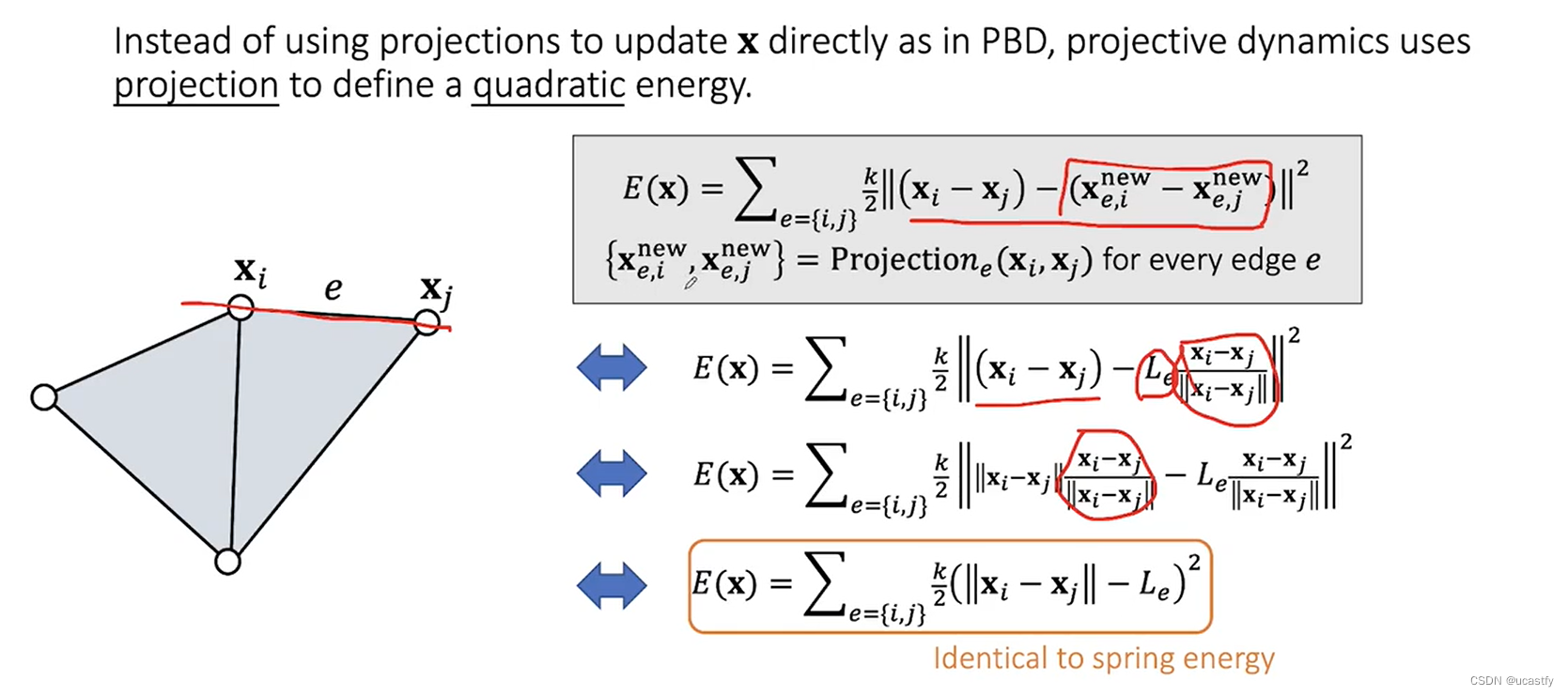
PB 方法与PBD方法最大的不同在于用约束处理不同的东西。PBD是用约束条件直接修改顶点的位置,而PB方法是用约束条件得到新的顶点位置之后,使用定义的能量函数来进行模拟。
新算出的顶点位置 x e , i n e w x_{e,i}^{new} xe,inew、 x e , j n e w x_{e,j}^{new} xe,jnew 应该满足保持弹簧原长(弹性势能最小),并且移动的方向是在原来的 x i − x j x_i-x_j xi−xj 方向上。由于 x i − x j ∣ ∣ x i − x j ∣ ∣ \frac {x_i-x_j}{||x_i-x_j||} ∣∣xi−xj∣∣xi−xj 是一个单位向量,依据范数的齐次性可以直接提出去,最后得到的 E ( x ) E(x) E(x) 和 弹簧能量函数是一样的。
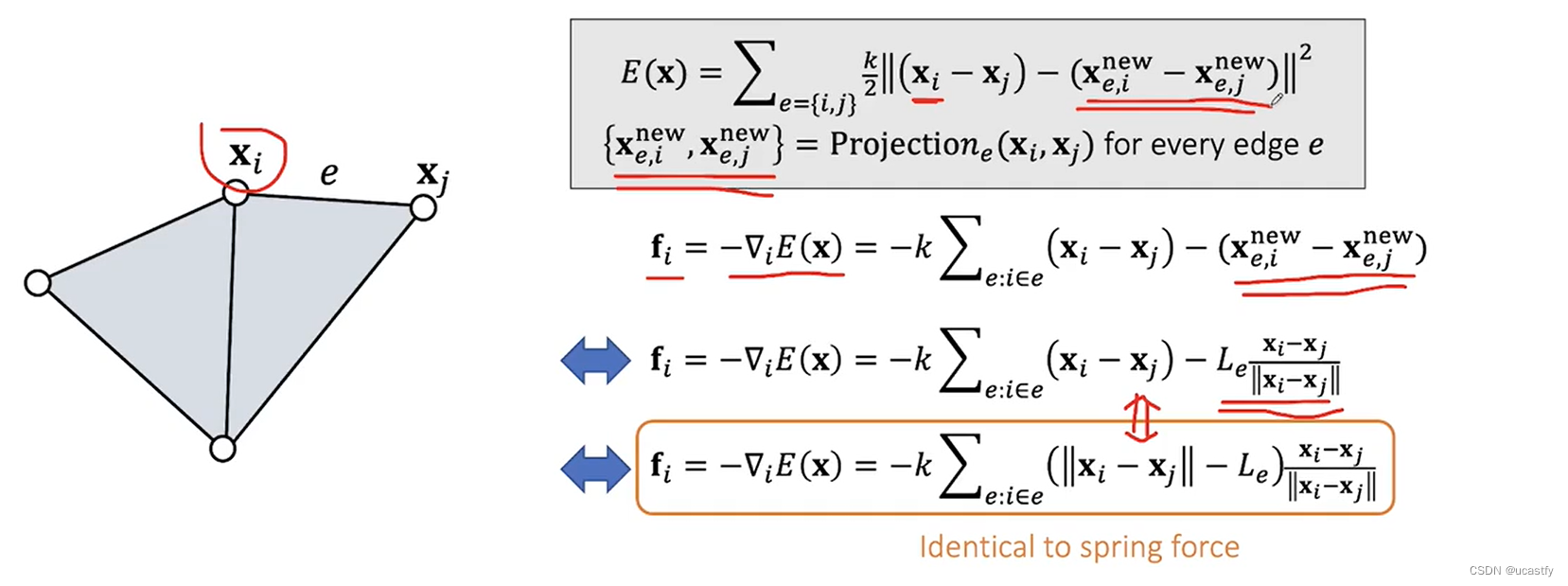
将能量中的 x e , i n e w − x e , j n e w x_{e,i}^{new}-x_{e,j}^{new} xe,inew−xe,jnew 定义为一个不变量,这样能量函数中只有一个变量 x i x_i xi 再求导即可得到 x i x_i xi 的力,可以发现该点收到的力和弹性势能和弹簧模型中定义的是一致的。
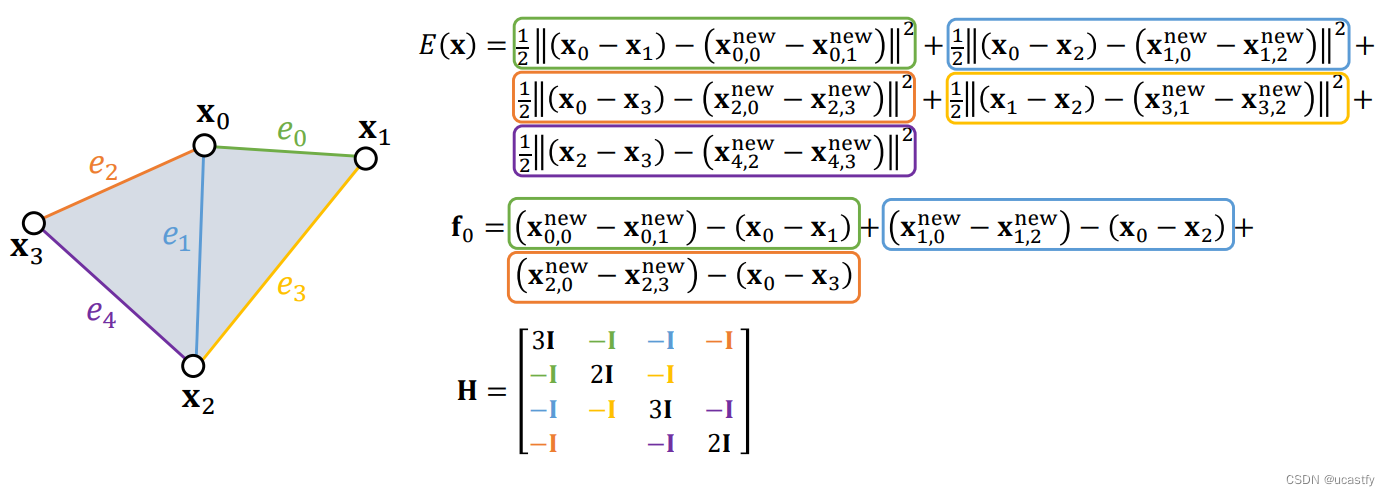
虽然力和能量与弹簧模型一致,但 P B PB PB 方法构造出的 H e s s i a n Hessian Hessian 是不一样的,这是 P B PB PB 方法的关键。由于我们假定了新的弹簧长度部分是一个常数,所以能量函数可以看作为是关于 x i x_i xi 的一个二次函数,对他两次求导后得到的 H e s s i a n Hessian Hessian 矩阵就会是一个常数矩阵。
H e s s i a n Hessian Hessian 的主对角线上 H i i H_{ii} Hii 系数标明了对应点 x i x_i xi 受到几个力的约束,非对角线 H i j H_{ij} Hij 则标明了 x i x_i xi 与 x j x_j xj 之间的受力。
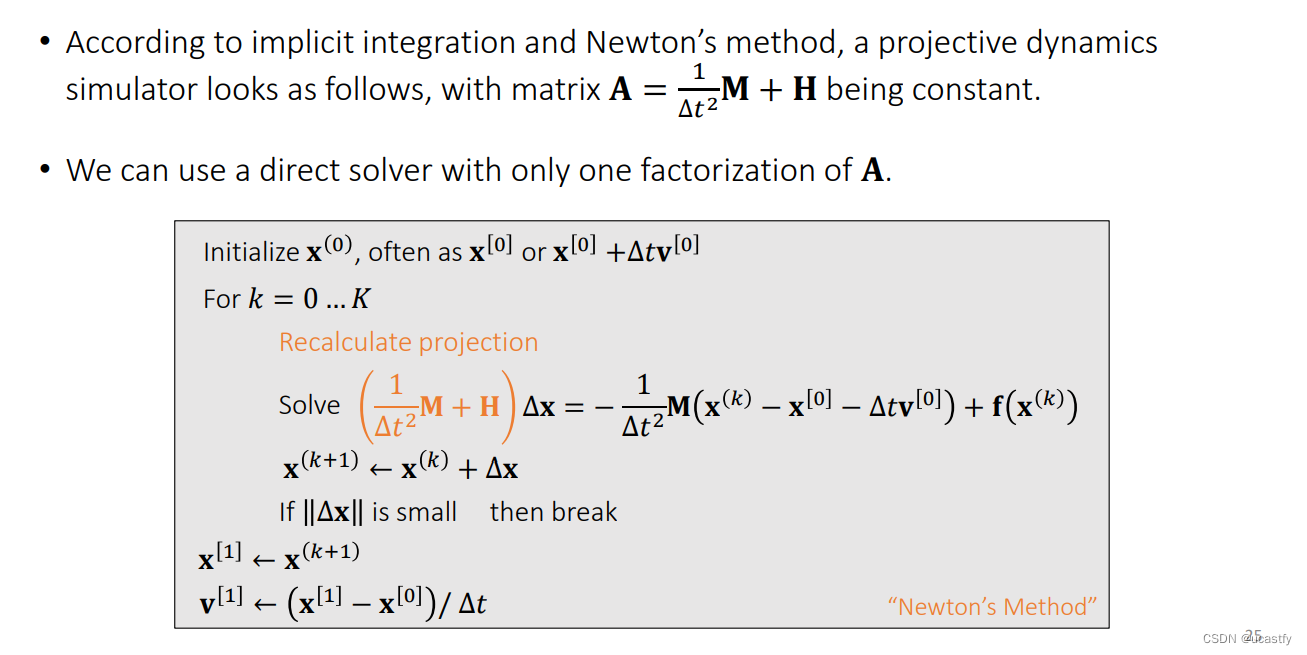
剩下过程和隐式积分一样,只是多了一步用约束求出新坐标(弹簧模型可以直接用弹力计算,但如果使用 shape matching 还是需要使用投影来算出新坐标),然后在求解线性系统的时候用一个常数的 H e s s i a n Hessian Hessian 矩阵。
由于迭代时 Δ x \Delta x Δx 左边是个常数矩阵用 LU 分解这样的直接法来解线性系统时就只用分解一次,减少了大部分开销。
只要在模拟的时候保证 H e s s i a n Hessian Hessian 矩阵是正定的,可以收敛,那么只要让实际计算的 H e s s i a n Hessian Hessian 矩阵与标准的 H e s s i a n Hessian Hessian 矩阵是近似的就可以,包括去掉使其不正定的部分、作业里的对角化方法或者现在变成常数正定矩阵,因此模拟的关键点在于如何让计算的 H e s s i a n Hessian Hessian 矩阵与真实的 H e s s i a n Hessian Hessian 矩阵靠近
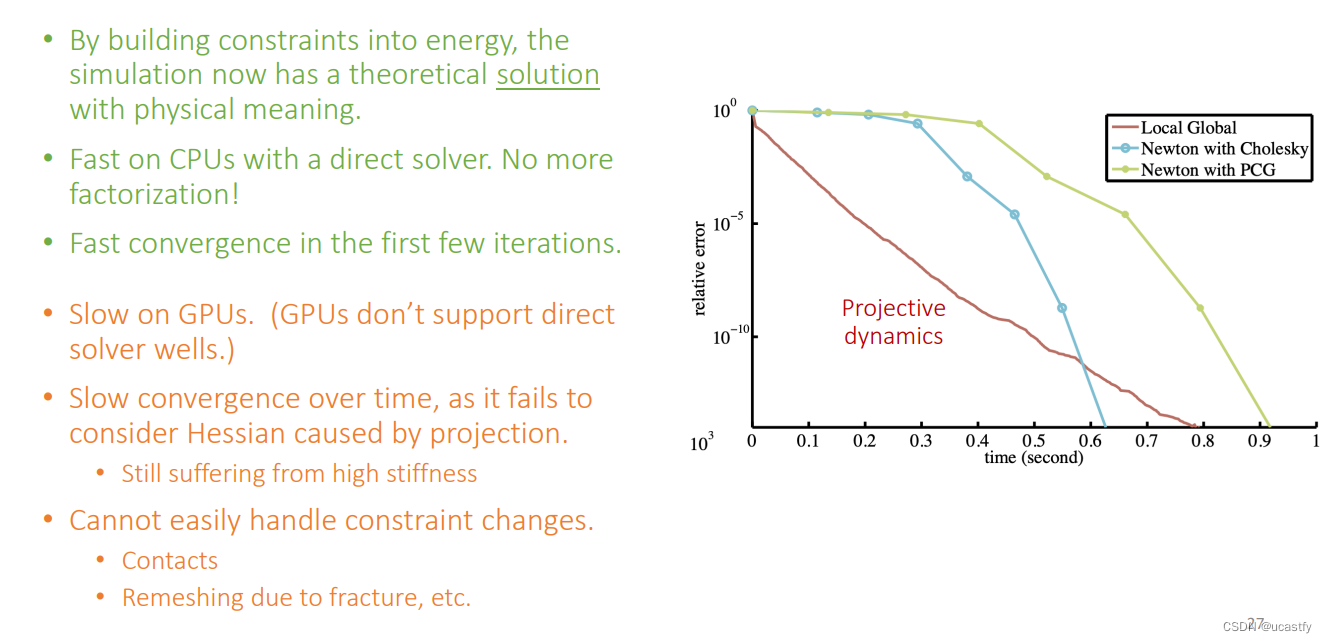
PD 方法中变量具有物理意义,并且在初次迭代时很快,易于在CPU上实现,但是由于是直接法分解矩阵,所以不适合在GPU上并行处理,迭代次数一多性能就会下降,并且无法处理一些约束上的变化,例如接触、破碎等。
~
5、Constrained Dynamics
动机:为了解决弹簧模型在弹性很大的时候,需要迭代次数很多的问题
除了用在弹簧上,还用在刚体模拟,通常用在多刚体的模拟,例如人体动画中关节之间的接触,对关节之间的距离约束很强。
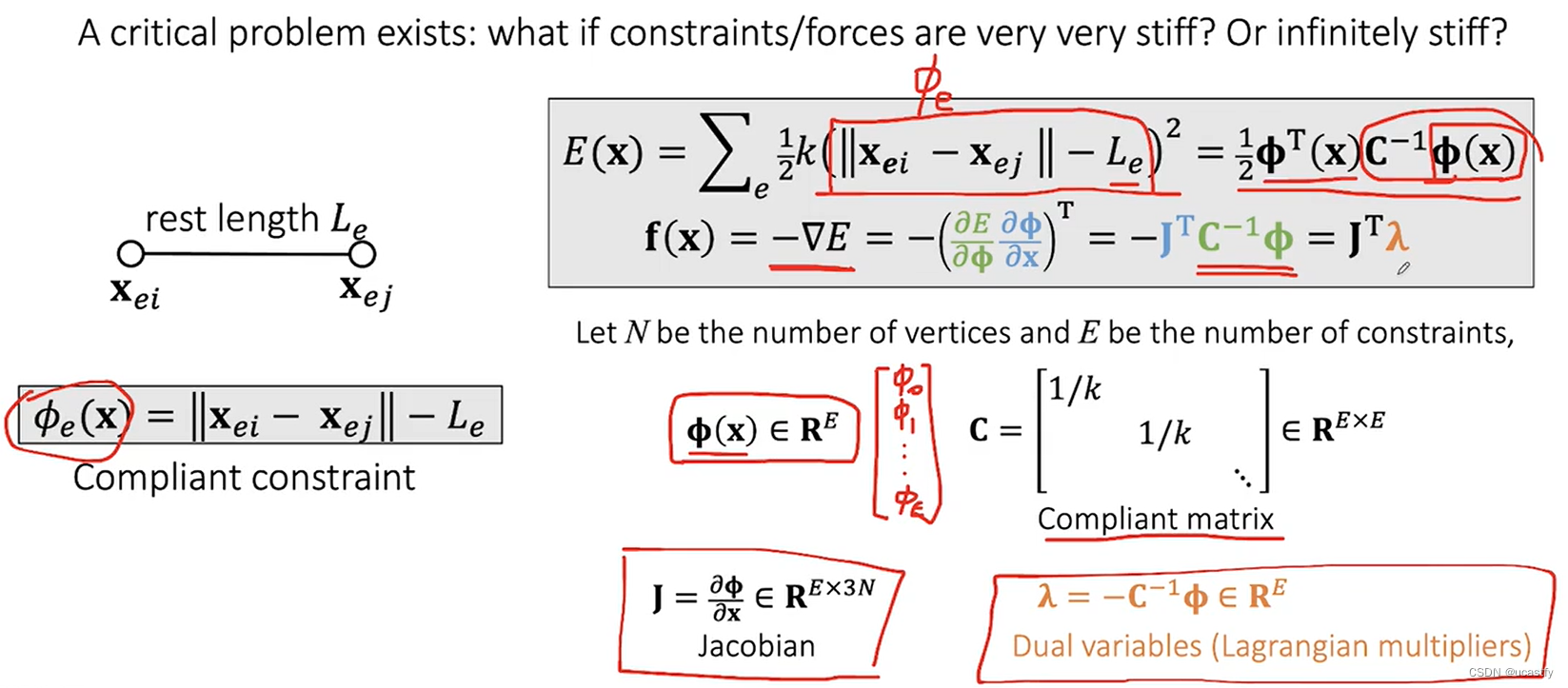
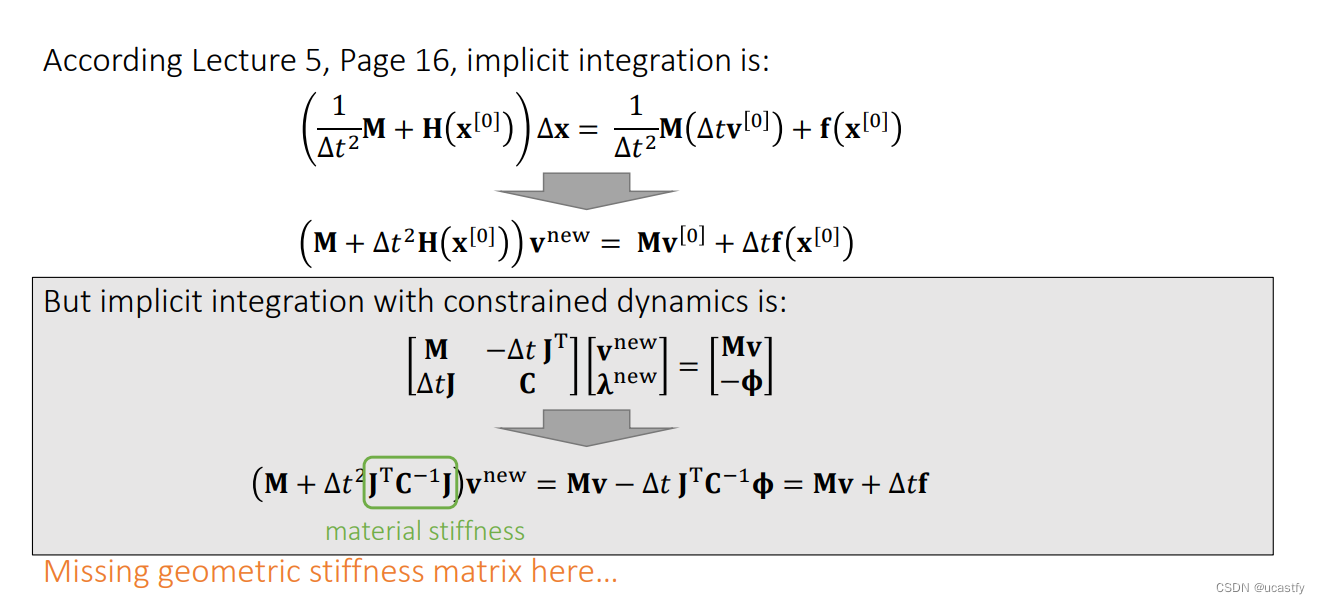
照样定义弹性约束,将E个约束写成矩阵相乘,其中的 C C C 为柔性矩阵,用弹性系数的倒数表示柔度。将 λ = − C − 1 ϕ \lambda = -C^{-1}\phi λ=−C−1ϕ 定义为一个拉格朗日算子。
对新得到的 f ( x ) f(x) f(x) 做隐式积分,由于 J J J、 λ \lambda λ 都含有 x x x,所以与之前的单变量隐式积分不同,这里是是做多变量隐式积分。
利用动量守恒定律:
m
v
n
e
w
−
m
v
o
l
d
=
f
∗
t
mv_{new} - mv_{old} = f*t
mvnew−mvold=f∗t
以及对
−
ϕ
=
C
λ
-\phi = C\lambda
−ϕ=Cλ 进行泰勒展开,通过
J
=
∂
ϕ
∂
x
J = \frac {\partial \phi}{\partial x}
J=∂x∂ϕ,
x
n
e
w
−
x
=
v
n
e
w
Δ
t
x_{new}-x=v^{new}\Delta t
xnew−x=vnewΔt可以推出
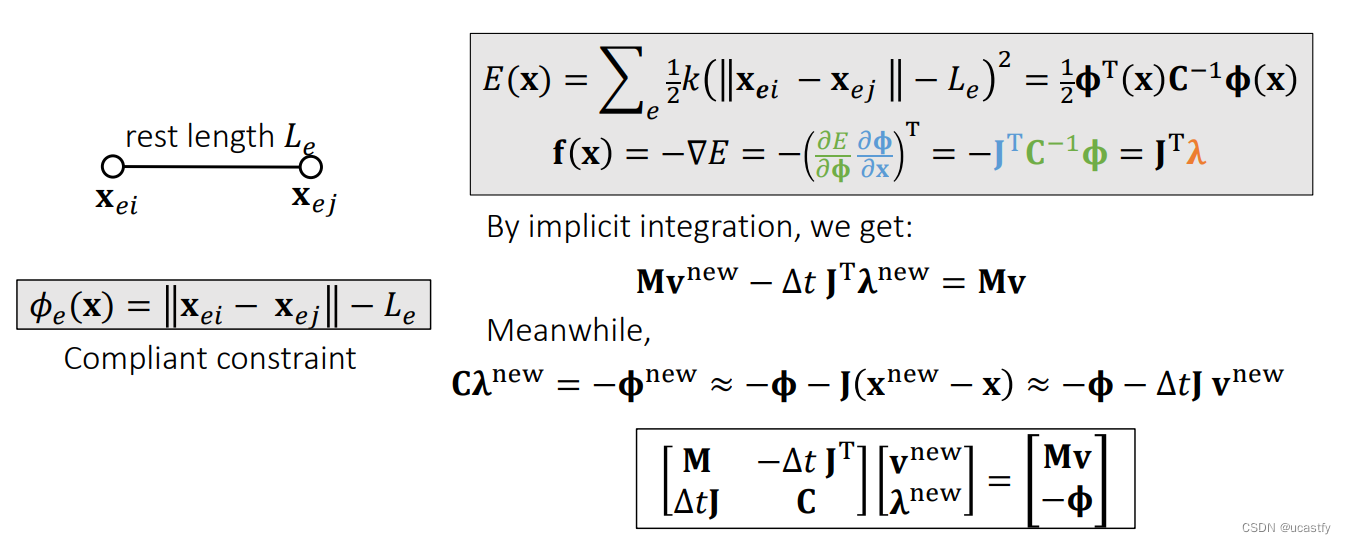
称 v v v 为主变量, λ \lambda λ 为 v v v 的对偶变量。
解线性系统有两种方法,直接求解得出两变量的方法称为 primal-dual 方法,但需要注意保证系数矩阵正定,否则常规方法如共轭梯度法可能用不了,需要使用特殊方法例如GMRES方法;第二种方法先求出 λ n e w \lambda_{new} λnew 再求出 v n e w v_{new} vnew ,但 λ n e w \lambda_{new} λnew 系数矩阵可能不好构造,也有可能比较稀疏。
Constrained Dynamics 方法好处是 k k k 越大,它的 C C C 越小,系统反而更稳定。因此常用于 Articulated Rigid Bodies (ragdoll animation)。
方法二对 λ \lambda λ 高斯消元后得到的式子,就是一个隐式积分的式子,只不过隐式积分里面的一部分 H e s s i a n Hessian Hessian 在高斯消元后是不存在的,把消失的东西加回去,可以增加隐式积分的稳定。
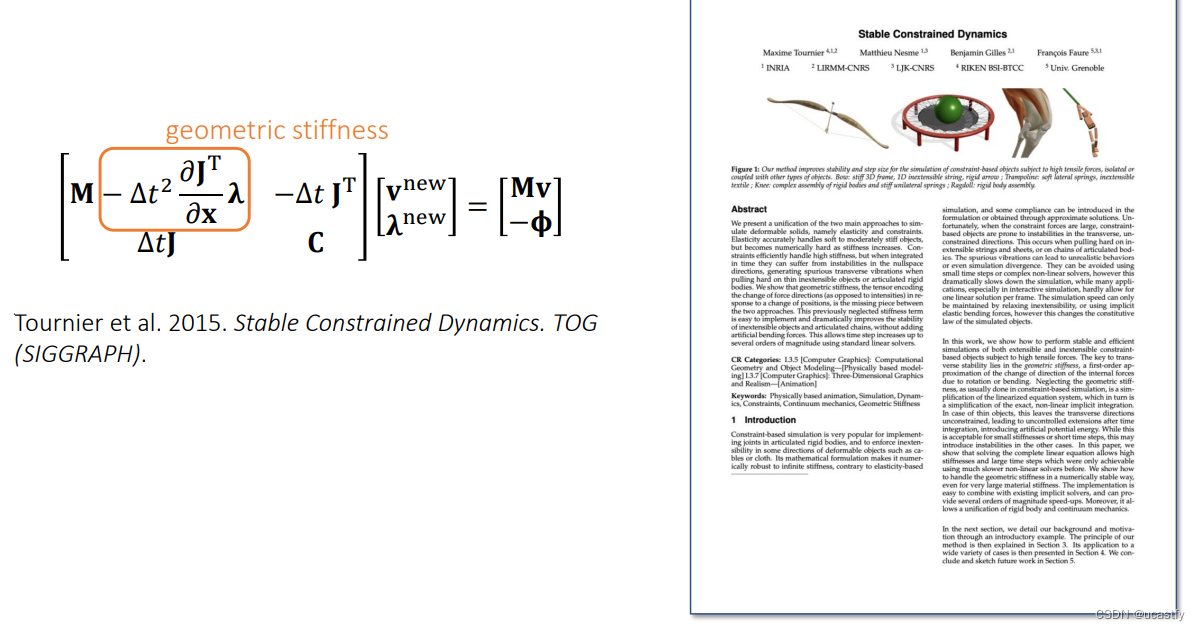
参考:Tournier et al. 2015. Stable Constrained Dynamics. TOG (SIGGRAPH)
总结:















 1913
1913











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









