







1. 生物过程自动化控制
在生物制药、发酵工程等生物过程中,可以利用生物信息学技术分析生物反应的机理和代谢网络,然后通过自动化控制系统对生物过程进行实时监测和优化控制,以提高生物产品的产量和质量。例如,在发酵过程中,通过监测细胞的生长状态、代谢产物的浓度等生物信息,自动调整发酵罐的温度、pH 值、溶氧等参数,实现发酵过程的最优控制。
2. PID 算法
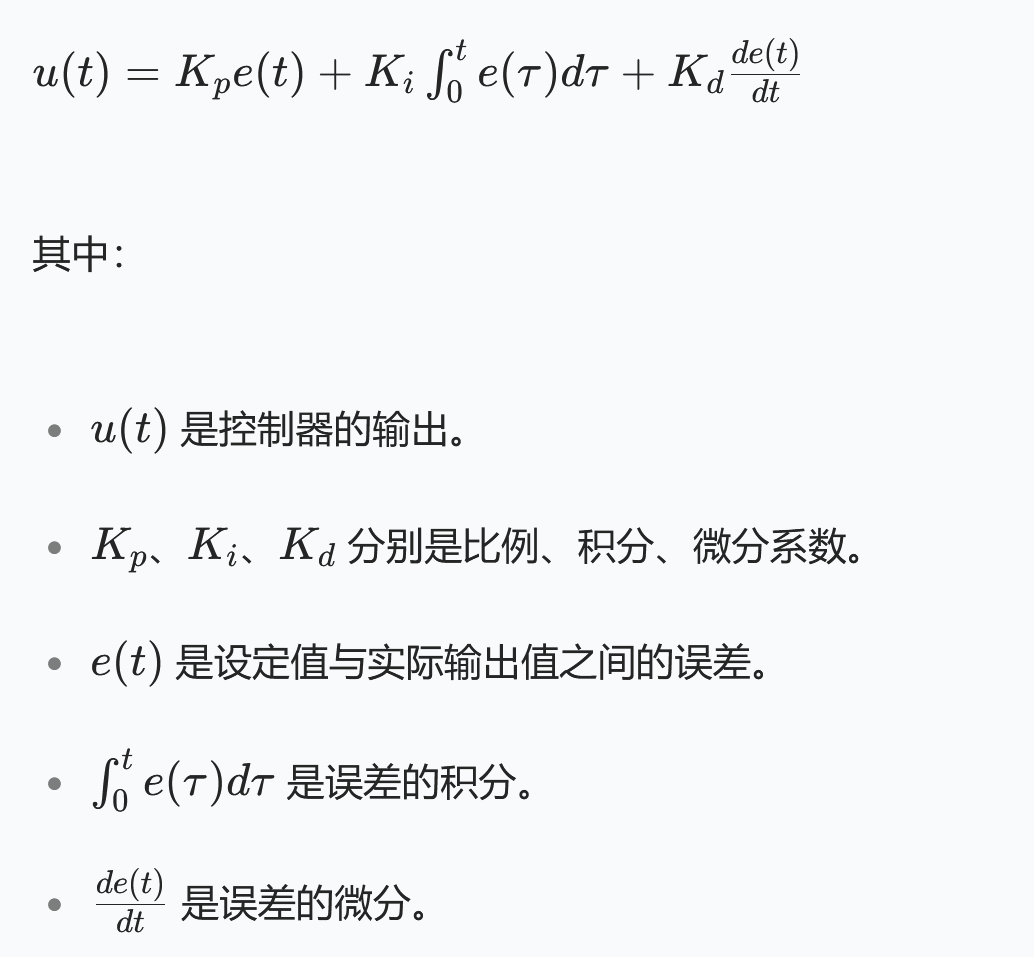
PID(Proportional - Integral - Derivative)算法即比例 - 积分 - 微分控制算法,是一种常见的反馈控制算法,在工业控制、机器人、自动驾驶等众多领域有着广泛应用。其核心思想是依据系统的设定值与实际输出值之间的误差,通过比例、积分、微分三个环节的计算,得出控制量,从而让系统的输出尽可能接近设定值。
比例环节(P):输出与误差成正比,能快速对误差做出响应,使系统输出朝着减小误差的方向变化。不过,单纯的比例控制可能会引发系统超调,并且难以完全消除稳态误差。
积分环节(I):对误差进行积分,用于消除系统的稳态误差。随着时间的推移,积分项会不断累积误差,从而逐渐减小稳态误差。但积分环节可能会使系统响应变慢,甚至引发积分饱和问题。
微分环节(D):依据误差的变化率进行计算,能够预测误差的变化趋势,提前给出控制信号,以此抑制系统的超调,增强系统的稳定性。
3. PID 算法Python实现
Python 实现 pH / 溶氧传感器数据采集,以及运用 PID 算法调整搅拌速度和温度。
# pid.py
import time
import random
# 模拟传感器数据采集
def read_pH():
# 生成一个 6.0 到 8.0 之间的随机数模拟 pH 值
return random.uniform(6.0, 8.0)
def read_dissolved_oxygen():
# 生成一个 4.0 到 7.0 之间的随机数模拟溶氧值
return random.uniform(4.0, 7.0)
# PID 控制器类
class PIDController:
def __init__(self, kp, ki, kd, setpoint):
# 初始化比例、积分、微分系数
self.kp = kp
self.ki = ki
self.kd = kd
# 设定目标值
self.setpoint = setpoint
# 积分项初始化为 0
self.integral = 0
# 上一次的误差初始化为 0
self.prev_error = 0
def update(self, current_value):
# 计算当前误差
error = self.setpoint - current_value
# 累加积分项
self.integral += error
# 计算误差的微分
derivative = error - self.prev_error
# 计算 PID 输出
output = self.kp * error + self.ki * self.integral + self.kd * derivative
# 更新上一次的误差
self.prev_error = error
return output
# 模拟调整搅拌速度
def adjust_stirring_speed(speed):
print(f"调整搅拌速度到: {speed} RPM")
# 模拟调整温度
def adjust_temperature(temperature):
print(f"调整温度到: {temperature} °C")
# 主控制循环
def main():
# 设置 PID 参数和目标值
pH_pid = PIDController(kp=1.0, ki=0.1, kd=0.01, setpoint=7.5)
do_pid = PIDController(kp=1.0, ki=0.1, kd=0.01, setpoint=6.0)
while True:
# 读取传感器数据
current_pH = read_pH()
current_do = read_dissolved_oxygen()
# 计算 PID 输出
pH_output = pH_pid.update(current_pH)
do_output = do_pid.update(current_do)
# 调整搅拌速度和温度
stirring_speed = round(50 + pH_output + do_output, 4)
temperature = round(25 + pH_output + do_output, 4)
adjust_stirring_speed(stirring_speed)
adjust_temperature(temperature)
# 等待一段时间后再次采集数据
time.sleep(2)
if __name__ == "__main__":
main()



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











