 51单片机实现步进电机多段控制
51单片机实现步进电机多段控制





摘要:本节介绍用控制步进电机三个主要参数角度、速度、方向,实现简单的步进电机多段控制
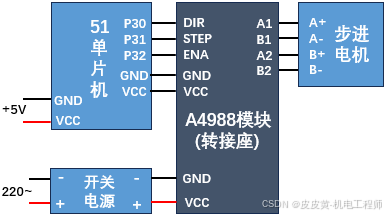
一、目标功能
输入多个目标角度,设定好步进电机速度,实现步进电机多段转动
二、计算过程
2.1 速度计算
根据第三节内容,定时器初值C与速度n函数关系为
C=65536−Xtal40∗X∗n……①C=65536-\frac{Xtal}{40*X*n}……① C=65536−40∗X∗nXtal……①
2.2 步数计算
根据第四节内容,转动步数step_num与转动角度angle函数关系为
stepnum=5∗angle∗X9……②step_{num} =\frac{5*angle*X}{9} ……②stepnum=95∗angle∗X……②
2.3程序结构
通过一个数组,设定步进电机多个目标角度,通过比较相邻两个目标角度大小,可以确定步进电机转动方向,实现步进电机控制的三要素:角度、速度、方向,最终完成步进电机多段运动的功能,流程图如下所示

三、测试
烧录hex文件后,单片机上电,步进电机转动5段,停止位置依次为:90°→360°→720°→180°→0°,转速100RPM,每一段中间停顿0.5s
四、功能扩展
扩展1:
① 增加4个按键,控制电机启动、方向、段数、目标角度、停顿时间
② 增加数码管,显示信息
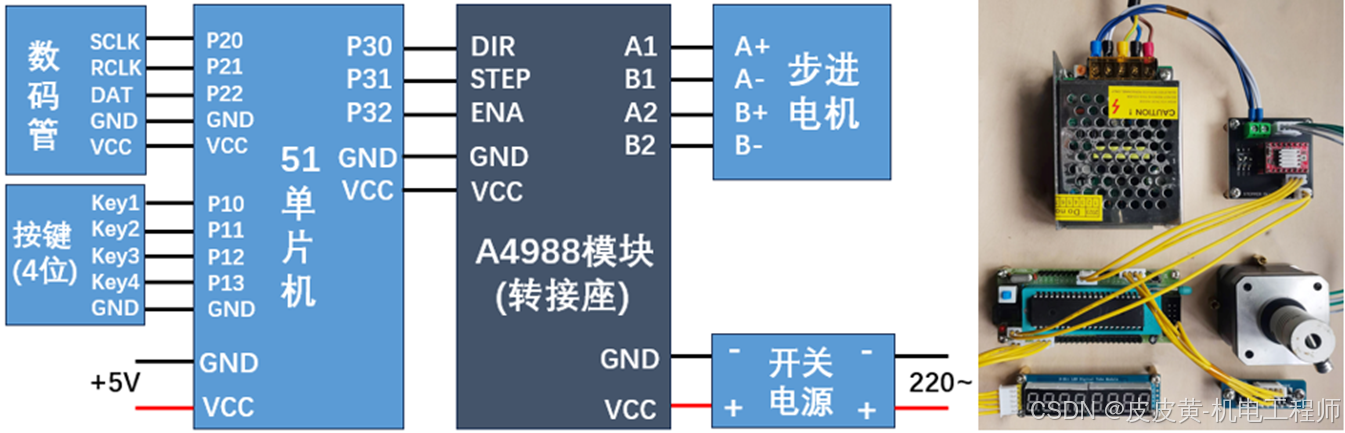
扩展2:
① 增加4个按键,控制电机启动、方向、段数、目标角度、停顿时间
② 增加1602LCD,显示信息

五、总结
此种方式利用定时器精确定时能力,从而控制电机转速,同时实现步进电机的多段运动,至此实现了步进电机三个主要参数角度、速度、方向的简单协同操作
六、附件(keil源码为付费资源)
https://pan.baidu.com/s/1nUr6QeJHufr40W3JrqZzwQ
提取码: aqry
↓↓↓点击下方【目录】,查看本系列全部文章


















 721
721

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









