







摘 要
本文设计的是一种基于单片机的步进电机控制系统。步进电机是一种常用的机电元件,其转动控制是通过向相绕组输送电脉冲信号来控制电机向一定的方向转动,每个脉冲信号都能使电机转动指定的角度。步进电机的位置误差不会积累,运行可靠、结构简单、可以快速启停等优点,而且容易实现开环精确控制,所以被普遍运用于各个经济领域。
本篇毕业设计报告简单介绍了一种利用51单片机、驱动芯片ULN二零零三、LED数码管按键等元器件组成的一个单片机步进电机控制系统设计方案,并进行了深入探讨了硬件软件作用原理。步进电机是一种非常常见的电机种类,本文简单介绍了电机的发展经历和中国的各方面应用大概情况,同时也讨论最常见的应用驱动技术。通过对步进电机的工作原理探讨分析,提出了基于单片机的硬件设计总方案,并对电路各板块进行详细设计研究讨论。最终,本文重点阐述控制系统的软件设计部分,包括程序编写和如何优化等各方面,围绕步进电机控制系统的设计方案详细展开,旨在提供一种可行的实现方案和实践指南。
硬件设计方案
2.2.1控制系统设计
(1)基于电子电路的控制
步进电机具有接收数字信号的特点,因此广泛应用于数字控制系统中。其中,硬件电路控制方式是相对常见的方式,它由数字逻辑单元组成的电子电路实现。这种方式具有电路结构简单、可靠性高、性能稳定等优点,能够满足基本的控制要求。然而,它也存在明显的局限性,例如功能较为单一,电路的功能无法更改,需要重新设计电路才能改变控制系统的功能,缺乏灵活性。系统组成如图2-3所示:

图 2-1 基于电子电路控制系统
(2)基于单片机的控制
基于单片机的步进电机控制采用软硬件相结合的方式,具有灵活可靠、功能多样等优点。如使用外围电路可实现步进电机的正反转、加减速、暂停等操作,并可通过显示电路显示状态。但系统硬件设计相对复杂,电路设计工作量也较大。系统组成如图2-4所示
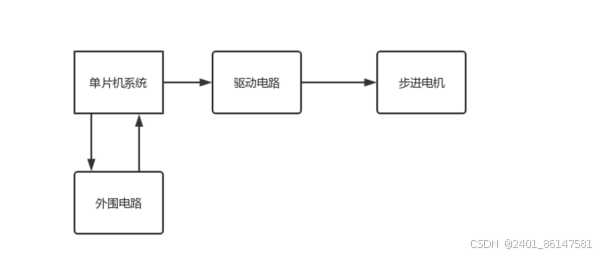
图 2-2 基于单片机控制系统
(3)基于PLC的控制
作为目前工业领域中最广泛使用的一种自动化控制系统,PLC控制方式具备多种优势。首先,它采用了计算机技术,输出方波脉冲控制步进电机,使控制过程更加准确和高效。其次,软硬件环形分配器在各自的领域内表现出不同的优点和缺点。软件环形分配器虽然占用PLC资源较多,但电路结构简单,便于编程和维修;而硬件环形分配器则资源占用较少,但安装成本相对较高。最重要的是,PLC控制方式具有非常强的抗干扰能力和可靠性,使其在各种复杂工业环境下都能够稳定运行。然而,PLC控制方式在高频率下可能会出现精度较低的问题,需要针对具体情况进行调整和优化。根据需求,本设计决定采用基于单片机控制的方案来控制步进电机,经过对比上述三种控制系统方案,该方案更加灵活、可靠,且可以扩展更多外围电路来增加控制系统的多样性。
2.2.2总体设计框图
单键驱显电源控制系统(步进电机)由单片机、键盘控制模块、电机驱动模块、数码显示模块以及电源模块五个部分组成。键盘控制模块、电机驱动模块和数码显示模块是本次设计的重点。按键作为一个外部中断源,设置了步进电机的正反转、加减速、启停等功能,按键按下后,单片机检测到信号调用相应的按键程序控制驱动芯片ULN2003,进而控制步进电机,同时显示器显示正反转、速度等级等状态。设计系统框图如下图2-5.
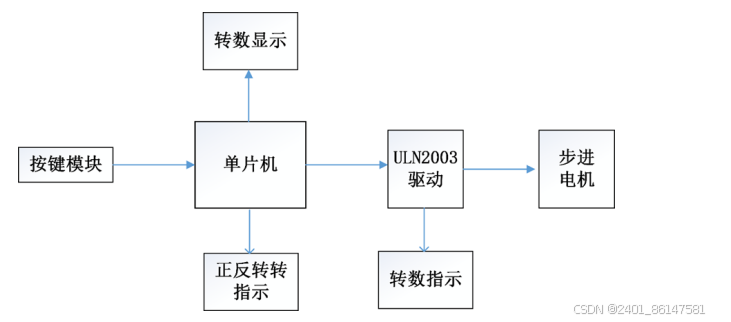
图 2-3 系统设计框图
结论
本文围绕着基于51单片机的步进电机控制系统设计,通过查阅文献和仿真,完成了以下工作:
(1)绘制电路原理图设计考虑元器件选型、电源供应和接口。符号库、连线方式等要遵循规范。程序编写需明确功能和硬件软件选型。定义、子程序、溢出及精度问题需注意。结构化设计有助于提高代码可读性、扩展性和维护性。
(2)按键控制步进电机各种转向/开始/停止等。
(3)该系统中的四位数码管能够显示当前步进电机的状态信息。其中,第一位可以显示电机的转动方向,而第二和第三位则可以显示当前的转速档位。
(4)四个红色LED指示电机转速
综上,本次设计达到了预期设计目标,具有一定的实用价值。
参考文献
[1] 宋建成,石宗义,耿太荣.ZDB系列单片机电动机综合保护器[J].工矿自动化, 1993, 000(004):21-24.
[2] 曲弋.电动机热特性研究及单片机电动机热保护器的研制[D].沈阳工业大学,2002.
[3] 玄子玉,薛佳楣.基于AVR单片机电动机智能保护器的设计[J].煤矿机械, 2009, 30(6):2.DOI:10.3969/j.issn.1003-0794.2009.06.089.
[4] 秦佳.基于C51的单片机电动机控制器制作[J].科协论坛:下半月, 2013(1):3.DOI:CNKI:SUN:KXLT.0.2013-01-048.
[5] 付云强,宋凤娟,韩来吉.AT89C51单片机在步进电动机控制系统中的应用[J].煤矿机械, 2007, 28(8):3.DOI:10.3969/j.issn.1003-0794.2007.08.037.
[6] 王晓明.电动机的单片机控制[M].北京航空航天大学出版社,2002.
[7] 张强,吴红星,谢宗武.基于单片机的电动机控制技术[M].中国电力出版社,2008.
[8] 尹作菲.基于单片机PIC18F2431的无刷直流电动机控制系统[D].华中农业大学,2009.DOI:10.7666/d.y1994149.
[9] 闵次凡.基于单片机的无刷直流电动机控制系统设计[J].机电一体化, 2012.DOI:CNKI:SUN:JDTH.0.2012-08-018.
[10] 王瑾.基于单片机的直流电动机控制系统研究[J].中国科技信息, 2011.DOI:CNKI:SUN:XXJK.0.2011-02-052.
[11] CHEN De-yi.基于嵌入式单片机的电机控制系统设计[J].计算机仿真, 2010(001):027.
[12] 马宪民.采用MCS-96单片机控制的开关磁阻电动机调速系统[C]//全国煤矿自动化学术年会.2002.
[13] 黄延球.基于16位单片机的无刷直流电动机控制系统[J].世界电子元器件, 2008(05):25-26.DOI:CNKI:SUN:SDYQ.0.2008-05-008.
[14] 王华荣,李丽.基于数据分析的单片机的直流电动机正反转控制[J].科学与信息化, 2017(4):2.
[15] 丁婷.基于单片机的步进电机的最优化控制[J]. 2008.
[16] 崔晶,刘和平,郑连清,等.基于PIC单片机的同步电动机新型智能励磁控制系统的设计[J].电子设计应用, 2003(11):3.DOI:CNKI:SUN:YYDZ.0.2003-11-016.
[17] 陈德益.基于嵌入式单片机的电机控制系统设计[J].计算机仿真, 2010(1):4.DOI:10.3969/j.issn.1006-9348.2010.01.097.
[18] Dobra M , Sita I V , Dobra P .Efficient implementation of sliding mode control for BLDC PM motor using TMS320F28335 microcontroller[C]//Education & Research Conference.IEEE, 2014.DOI:10.1109/EDERC.2014.6924361.
[19] Jaziri I , Charaabi L , Jelassi K .A closed Loop DC Motor Control using low cost single-board microcontroller based on embedded Linux[C]//2016 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM).2016.DOI:10.1109/CISTEM.2016.8066800.
[20]Wardhana A W , Nugroho D T .Stepper Motor Control with DRV 8825 Driver Based on Square Wave Signal from AVR Microcontroller Timer[J]. 2019.DOI:10.1063/1.5097484.

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









