










目录
通过之前入门系列的学习,我们对FreeRTOS的移植已经有了一个大概的概念,那么我们下面就给其投入到实际的使用当中。
1. NVIC
1.1 NVIC简介
首先,我们需要知道什么是中断?
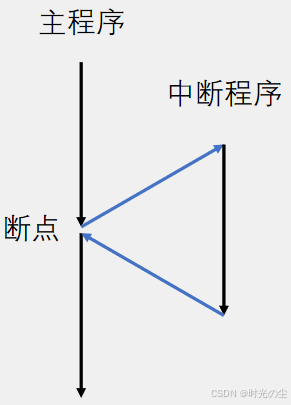
中断是在主程序运行过程中,出现了特定的中断触发条件(中断源),使得CPU暂停当前正在运行的程序,转而去处理中断程序,处理完成后又返回原来被暂停的位置继续运行。
什么是中断优先级?
中断优先级是:当有多个中断源同时申请中断时,CPU会根据中断源的轻重缓急进行裁决,优先响应更加紧急的中断源。
什么是中断嵌套?
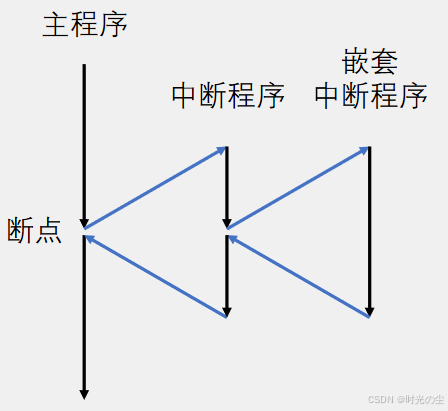
中断嵌套是:当一个中断程序正在运行时,又有新的更高优先级的中断源申请中断,CPU再次暂停当前中断程序,转而去处理新的中断程序,处理完成后依次进行返回。
STM32F1系列包含最多:68个可屏蔽中断通道,包含EXTI、TIM、ADC、USART、SPI、I2C、RTC等多个外设。
使用NVIC统一管理中断,每个中断通道都拥有16个可编程的优先等级,可对优先级进行分组,进一步设置抢占优先级和响应优先级。
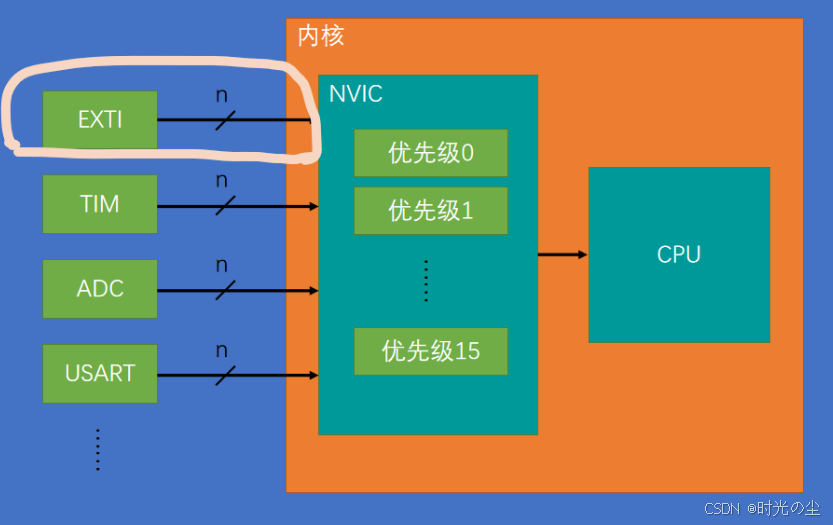
1.2 NVIC基本结构
NVIC:嵌套中断向量控制器
统一分配中断优先级,和管理中断
NVIC内核外设,CPU的小助手
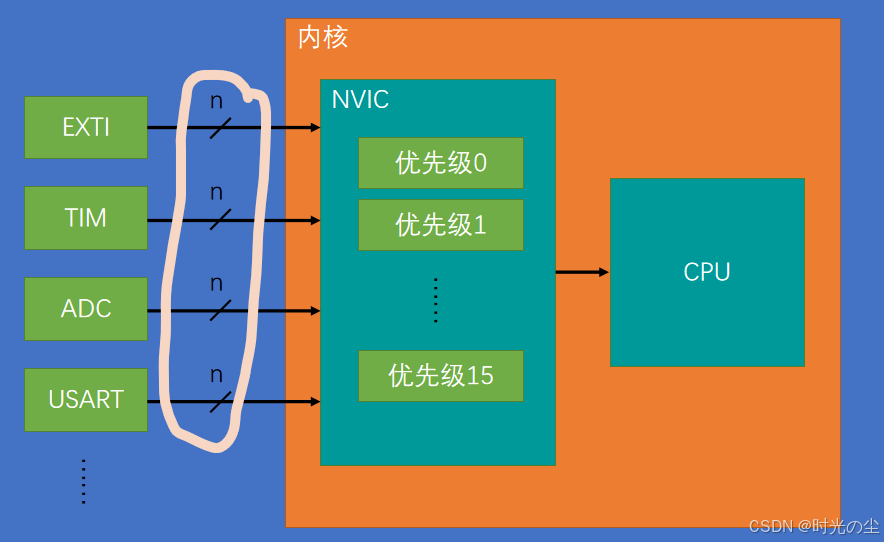
米色圈住部分,意思是:一个外设可能会占用多个中断通道,所以这里有“n”条线,NVIC只有一个输出口,NVIC根据每个中断的优先级进行分配中断的先后顺序。
例如:医院叫号,CPU为医生,NVIC进行排号,中断是病人,NVIC根据病人的紧急程度进行排号,找医生。
1.3 NVIC优先级分组
NVIC的中断优先级由优先级寄存器的4位(0~15)决定,这4位可以进行切分,分为高n位的抢占优先级和低4-n位的响应优先级。
抢占优先级高的可以中断嵌套,响应优先级高的可以优先排队,抢占优先级和响应优先级均相同的按中断号排队。
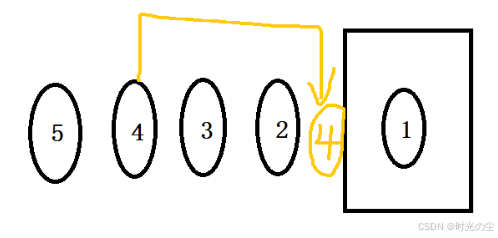
对于响应优先级,相当于“插队”,此时“1”在看病(程序在进行中),“4”要是比较严重,“4”可以进行插队到“2”前面,但是要等“1”看完(进程走完):
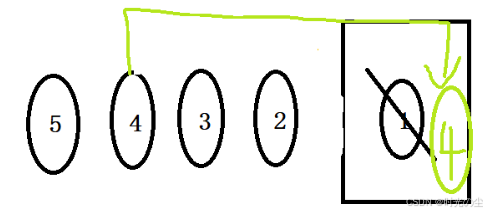
对于抢占优先级(中断嵌套),相当于“1”在看病(程序在进行中),“4”不等“1”看完直接冲到屋内,把“1”推到一边,“4”先看病(进行),“4”先看完,在进行“1”,再依次进行后续的操作:
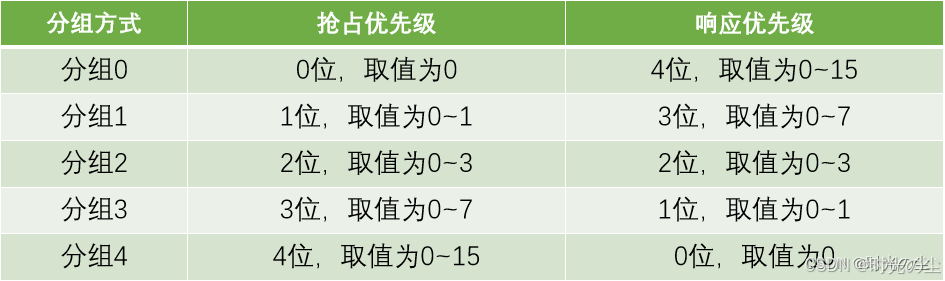
在FreeRTOS中我们主要使用的是优先级分组4,即所有优先级都是抢占优先级,这样FreeRTOS能完全控制哪些任务或中断可以抢占当前上下文。
1.4 NVIC初始化
NVIC的配置非常简单:中断分组、定义结构体、配置中断线路、配置优先级、使能:
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn; //选择配置NVIC的EXTI15_10_IRQn线
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 6; //指定NVIC线路的抢占优先级为6
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //指定NVIC线路的响应优先级为0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
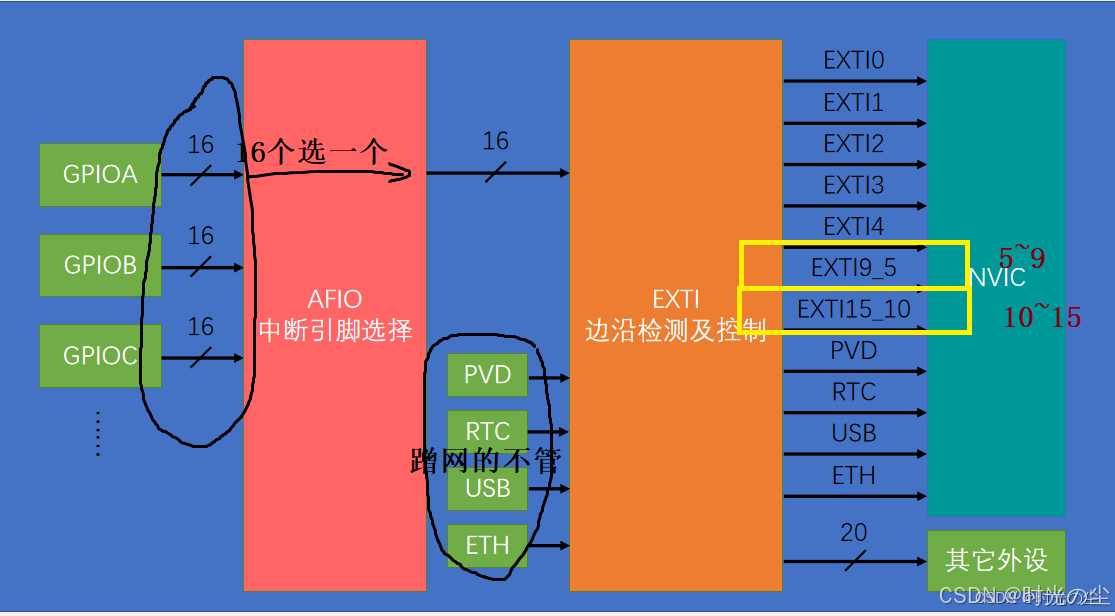
2. EXTI
2.1 EXTI简介
EXTI(Extern Interrupt)外部中断 EXTI可以监测指定GPIO口的电平信号,当其指定的GPIO口产生电平变化时,EXTI将立即向NVIC发出中断申请,经过NVIC裁决后即可中断CPU主程序,使CPU执行EXTI对应的中断程序。
简单来说:电平变化,触发中断
支持的触发方式:上升沿/下降沿/双边沿/软件触发
上升沿触发
数字电平从低电平(数字“0”)变为高电平(数字“1”)的那一瞬间叫作上升沿。 上升沿触发是当信号有上升沿时的开关动作,当电位由低变高而触发输出变化的就叫上升沿触发。也就是当测到的信号电位是从低到高也就是上升时就触发,叫做上升沿触发。
·下降沿触发
数字电路中,数字电平从高电平(数字“1”)变为低电平(数字“0”)的那一瞬间叫作下降沿。下降沿触发是当信号有下降沿时的开关动作,当电位由高变低而触发输出变化的就叫下降沿触发。也就是当测到的信号电位是从高到低也就是下降时就触发,叫做下降沿触发。
那么我们可以很好的理解两种触发:
上升沿触发 就是当电压从低变高时触发中断
下降沿触发 就是当电压从高变低时触发中断
双边沿触发
可以看做上升沿和下降沿的结合,也就是二者都可以触发中断。
软件触发
引脚没变化,程序执行代码触发中断。
2.2 EXTI基本结构
每个GPIO都有16个引脚,每个引脚都能触发中断,但是会通过AFIO中断引脚选择的模块,在GPIOA,GPIOB,GPIOC......在16个引脚中选择一个Pin连接。
相当于在PA0,PB0,PC0......选个0,PA1,PB1,PC1......选个1,依次类推:
2.3 EXTI初始化
根据上图我们进行初始化配置,首先先找到我们需要的引脚,这里我们使用PC13,然后定义一个结构体变量,然后因为我们配置的是PC13,那么就选择13为中断线,将中断线配置为中断模式,选择触发模式,使能:
GPIO_EXTILineConfig(GPIO_PortSourceGPIOC, GPIO_PinSource13);//选择想要中断的引脚
/*EXTI初始化*/
EXTI_InitTypeDef EXTI_InitStructure; //定义结构体变量
EXTI_InitStructure.EXTI_Line = EXTI_Line13 ; //选择配置外部中断线
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //指定外部中断线为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; //指定外部中断线为上升沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //指定外部中断线使能
EXTI_Init(&EXTI_InitStructure); //将结构体变量交给EXTI_Init,配置EXTI外设 3. 程序设计
上面做了一个大概的了解,那么开始设计一个程序验证一下。
在 FreeRTOS 中创建了两个任务获取消息队列,并且定义了两个按键 KEY1 与 KEY2 的触发方式为中断触发,其触发的中断服务函数则跟裸机一样,在中断触发的时候通过消息队列将消息传递给任务,任务接收到消息就将信息通过串口调试助手显示出来。
这里我们使用之前移植好的空白工程:
3.1 中断初始化配置
我们先对中断文件进行配置,这里主要是对两个按键使能外部中断,首先我们对两个按键进行宏定义封装一下,方便后续更改:
//引脚定义
#define KEY1_INT_GPIO_PORT GPIOA
#define KEY1_INT_GPIO_CLK (RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO)
#define KEY1_INT_GPIO_PIN GPIO_Pin_0
#define KEY1_INT_EXTI_PORTSOURCE GPIO_PortSourceGPIOA
#define KEY1_INT_EXTI_PINSOURCE GPIO_PinSource0
#define KEY1_INT_EXTI_LINE EXTI_Line0
#define KEY1_INT_EXTI_IRQ EXTI0_IRQn
#define KEY1_IRQHandler EXTI0_IRQHandler
#define KEY2_INT_GPIO_PORT GPIOC
#define KEY2_INT_GPIO_CLK (RCC_APB2Periph_GPIOC|RCC_APB2Periph_AFIO)
#define KEY2_INT_GPIO_PIN GPIO_Pin_13
#define KEY2_INT_EXTI_PORTSOURCE GPIO_PortSourceGPIOC
#define KEY2_INT_EXTI_PINSOURCE GPIO_PinSource13
#define KEY2_INT_EXTI_LINE EXTI_Line13
#define KEY2_INT_EXTI_IRQ EXTI15_10_IRQn
#define KEY2_IRQHandler EXTI15_10_IRQHandler然后首先进行引脚的初始化操作:
//GPIO口配置
void GPIO_Configuration(void)
{
/*开启时钟*/
RCC_APB2PeriphClockCmd(KEY1_INT_GPIO_CLK, ENABLE); //开启KEY1_INT_GPIO_CLK的时钟
RCC_APB2PeriphClockCmd(KEY2_INT_GPIO_CLK, ENABLE); //开启KEY2_INT_GPIO_CLK的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,外部中断必须开启AFIO的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = KEY1_INT_GPIO_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(KEY1_INT_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = KEY2_INT_GPIO_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(KEY2_INT_GPIO_PORT, &GPIO_InitStructure);
}然后是对两个引脚的外部中断线路配置:
void EXTI_Configuration(void)
{
/*AFIO选择中断引脚*/
GPIO_EXTILineConfig(KEY1_INT_EXTI_PORTSOURCE, KEY1_INT_EXTI_PINSOURCE);
GPIO_EXTILineConfig(KEY2_INT_EXTI_PORTSOURCE, KEY2_INT_EXTI_PINSOURCE);
/*EXTI初始化*/
EXTI_InitTypeDef EXTI_InitStructure; //定义结构体变量
EXTI_InitStructure.EXTI_Line = KEY1_INT_EXTI_LINE; //选择配置外部中断的0号线和1号线
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //指定外部中断线使能
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //指定外部中断线为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; //指定外部中断线为上升沿触发
EXTI_Init(&EXTI_InitStructure); //将结构体变量交给EXTI_Init,配置EXTI外设
EXTI_InitStructure.EXTI_Line = KEY2_INT_EXTI_LINE; //选择配置外部中断的0号线和1号线
EXTI_InitStructure.EXTI_LineCmd = ENABLE; //指定外部中断线使能
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //指定外部中断线为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //指定外部中断线为下降沿触发
EXTI_Init(&EXTI_InitStructure); //将结构体变量交给EXTI_Init,配置EXTI外设
}
然后是对NVIC的一些配置:
//NVIC配置
static void NVIC_Configuration(void)
{
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4); //配置NVIC为分组4
//此分组配置在整个工程中仅需调用一次
//若有多个中断,可以把此代码放在main函数内,while循环之前
//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
//KEY1配置
NVIC_InitStructure.NVIC_IRQChannel = KEY1_INT_EXTI_IRQ; //选择配置NVIC的KEY1_INT_EXTI_IRQ线
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 6; //指定NVIC线路的抢占优先级为6
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //指定NVIC线路的响应优先级为0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
//KEY2配置
NVIC_InitStructure.NVIC_IRQChannel = KEY2_INT_EXTI_IRQ; //选择配置NVIC的KEY1_INT_EXTI_IRQ线
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 6; //指定NVIC线路的抢占优先级为6
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //指定NVIC线路的响应优先级为0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
}配置完将上面函数放到一个函数中,回头主函数直接调用这个函数进行初始化操作即可:
//初始化文件
void EXTI_Config(void)
{
GPIO_Configuration();
NVIC_Configuration();
EXTI_Configuration();
}3.2 消息队列创建
队列又称消息队列,是一种常用于任务间通信的数据结构,消息队列可以在任务与任务间、中断和任务间传递信息,实现了任务接收来自其他任务或中断的不固定长度的消息,任务能够从队列里面读取消息。
对于消息队列这里不做过多的阐述,详细了解可以参考之前的入门系列讲解:
首先既然是任务,那就需要任务句柄,来到主函数:
static TaskHandle_t LED_Task_Handle = NULL;/* 任务句柄 */然后对于消息队列,也要为其内核对象创建一个句柄,方便后续对消息队列的操作:
QueueHandle_t Test_Queue =NULL;对于创建一个队列,我们需要规定好队列的长度,以及队列中每个消息的大小:
#define QUEUE_LEN 4 /* 队列的长度,最大可包含多少个消息 */
#define QUEUE_SIZE 4 /* 队列中每个消息大小(字节) */准备完成后,我们开始在AppTaskCreate()函数进行对消息队列的创建,调用xQueueCreate()函数进行创建:
/* 创建Test_Queue */
Test_Queue = xQueueCreate((UBaseType_t ) QUEUE_LEN,/* 消息队列的长度 */
(UBaseType_t ) QUEUE_SIZE);/* 消息的大小 */
if(NULL != Test_Queue)
printf("Test_Queue消息队列创建成功!\r\n");3.3 中断服务函数配置
我们先看一下裸机的中断服务函数,通过调用EXTI_GetITStatus()函数查看中断是否被触发,在进行后续的操作:
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line0) == SET) //判断是否是外部中断0号线触发的中断
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)
{
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) //PB0的下降沿触发中断,此时检测另一相PB1的电平,目的是判断旋转方向
{
Encoder_Count --; //此方向定义为反转,计数变量自减
}
}
EXTI_ClearITPendingBit(EXTI_Line0); //清除外部中断0号线的中断标志位
//中断标志位必须清除
//否则中断将连续不断地触发,导致主程序卡死
}
}我们对其更改一下,首先对于KEY1,为了防止其他中断打断操作我们进入临界段进行操作:
void KEY1_IRQHandler(void)
{
BaseType_t pxHigherPriorityTaskWoken;
//确保是否产生了EXTI Line中断
uint32_t ulReturn;
/* 进入临界段,临界段可以嵌套 */
ulReturn = taskENTER_CRITICAL_FROM_ISR();
if(EXTI_GetITStatus(KEY1_INT_EXTI_LINE) != RESET)
{
//清除中断标志位
EXTI_ClearITPendingBit(KEY1_INT_EXTI_LINE);
}
/* 退出临界段 */
taskEXIT_CRITICAL_FROM_ISR( ulReturn );
}当确认产生中断,我们就地调用消息队列发送函数xQueueSendFromISR()进行数据的发送:
/* 将数据写入(发送)到队列中,等待时间为 0 */
xQueueSendFromISR(Test_Queue, /* 消息队列的句柄 */
&send_data1,/* 发送的消息内容 */
&pxHigherPriorityTaskWoken);发送完后,进行一次任务切换,如果有更高优先级的任务进行一次任务切换:
//如果需要的话进行一次任务切换
portYIELD_FROM_ISR(pxHigherPriorityTaskWoken);这些配置我保存在stm32f10x_it.c文件,方便后续维护,完整配置:
/**
******************************************************************************
* @file Project/STM32F10x_StdPeriph_Template/stm32f10x_it.c
* @author MCD Application Team
* @version V3.5.0
* @date 08-April-2011
* @brief Main Interrupt Service Routines.
* This file provides template for all exceptions handler and
* peripherals interrupt service routine.
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x_it.h"
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
//硬件外设
#include "LED.h"
#include "Usart.h"
#include "Key.h"
#include "Exti.h"
/** @addtogroup STM32F10x_StdPeriph_Template
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/******************************************************************************/
/* Cortex-M3 Processor Exceptions Handlers */
/******************************************************************************/
/**
* @brief This function handles NMI exception.
* @param None
* @retval None
*/
void NMI_Handler(void)
{
}
/**
* @brief This function handles Hard Fault exception.
* @param None
* @retval None
*/
void HardFault_Handler(void)
{
/* Go to infinite loop when Hard Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Memory Manage exception.
* @param None
* @retval None
*/
void MemManage_Handler(void)
{
/* Go to infinite loop when Memory Manage exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Bus Fault exception.
* @param None
* @retval None
*/
void BusFault_Handler(void)
{
/* Go to infinite loop when Bus Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles Usage Fault exception.
* @param None
* @retval None
*/
void UsageFault_Handler(void)
{
/* Go to infinite loop when Usage Fault exception occurs */
while (1)
{
}
}
/**
* @brief This function handles SVCall exception.
* @param None
* @retval None
*/
//void SVC_Handler(void)
//{
//}
/**
* @brief This function handles Debug Monitor exception.
* @param None
* @retval None
*/
void DebugMon_Handler(void)
{
}
/**
* @brief This function handles PendSVC exception.
* @param None
* @retval None
*/
//void PendSV_Handler(void)
//{
//}
/**
* @brief This function handles SysTick Handler.
* @param None
* @retval None
*/
extern void xPortSysTickHandler(void);
//systick中断服务函数
void SysTick_Handler(void)
{
#if (INCLUDE_xTaskGetSchedulerState == 1 )
if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED)
{
#endif /* INCLUDE_xTaskGetSchedulerState */
xPortSysTickHandler();
#if (INCLUDE_xTaskGetSchedulerState == 1 )
}
#endif /* INCLUDE_xTaskGetSchedulerState */
}
/******************************************************************************/
/* STM32F10x Peripherals Interrupt Handlers */
/* Add here the Interrupt Handler for the used peripheral(s) (PPP), for the */
/* available peripheral interrupt handler's name please refer to the startup */
/* file (startup_stm32f10x_xx.s). */
/******************************************************************************/
/**
* @brief This function handles PPP interrupt request.
* @param None
* @retval None
*/
/*void PPP_IRQHandler(void)
{
}*/
/**
* @}
*/
/* 声明引用外部队列 */
extern QueueHandle_t Test_Queue;
static uint32_t send_data1 = 1;
static uint32_t send_data2 = 2;
//KEY1_IRQHandler中断服务函数
void KEY1_IRQHandler(void)
{
BaseType_t pxHigherPriorityTaskWoken;
//确保是否产生了EXTI Line中断
uint32_t ulReturn;
/* 进入临界段,临界段可以嵌套 */
ulReturn = taskENTER_CRITICAL_FROM_ISR();
if(EXTI_GetITStatus(KEY1_INT_EXTI_LINE) != RESET)
{
/* 将数据写入(发送)到队列中,等待时间为 0 */
xQueueSendFromISR(Test_Queue, /* 消息队列的句柄 */
&send_data1,/* 发送的消息内容 */
&pxHigherPriorityTaskWoken);
//如果需要的话进行一次任务切换
portYIELD_FROM_ISR(pxHigherPriorityTaskWoken);
//清除中断标志位
EXTI_ClearITPendingBit(KEY1_INT_EXTI_LINE);
}
/* 退出临界段 */
taskEXIT_CRITICAL_FROM_ISR( ulReturn );
}
//KEY2_IRQHandler中断服务函数
void KEY2_IRQHandler(void)
{
BaseType_t pxHigherPriorityTaskWoken;
uint32_t ulReturn;
/* 进入临界段,临界段可以嵌套 */
ulReturn = taskENTER_CRITICAL_FROM_ISR();
//确保是否产生了EXTI Line中断
if(EXTI_GetITStatus(KEY2_INT_EXTI_LINE) != RESET)
{
/* 将数据写入(发送)到队列中,等待时间为 0 */
xQueueSendFromISR(Test_Queue, /* 消息队列的句柄 */
&send_data2,/* 发送的消息内容 */
&pxHigherPriorityTaskWoken);
//如果需要的话进行一次任务切换
portYIELD_FROM_ISR(pxHigherPriorityTaskWoken);
//清除中断标志位
EXTI_ClearITPendingBit(KEY2_INT_EXTI_LINE);
}
/* 退出临界段 */
taskEXIT_CRITICAL_FROM_ISR( ulReturn );
}
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
3.4 消息队列接收
配置完回到主函数,既然消息队列已经有发送了,那么下面我们在主函数创建一个接收任务:
static void LED_Task(void* parameter)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
uint32_t r_queue; /* 定义一个接收消息的变量 */
while (1)
{
/* 队列读取(接收),等待时间为一直等待 */
xReturn = xQueueReceive( Test_Queue, /* 消息队列的句柄 */
&r_queue, /* 发送的消息内容 */
portMAX_DELAY); /* 等待时间 一直等 */
if(pdPASS == xReturn)
{
printf("触发中断的是 KEY%d !\r\n",r_queue);
}
else
{
printf("数据接收出错!\r\n");
}
Toggle_LED_R();
}
}同时对任务进行创建:
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED_Task, /* 任务入口函数 */
(const char* )"LED_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LED_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED_Task任务成功!\r\n"); 完整主函数代码:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Usart.h"
#include "Key.h"
#include "Exti.h"
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
/* 标准库头文件 */
#include <string.h>
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL; /* 创建任务句柄 */
static TaskHandle_t LED_Task_Handle = NULL;/* LED任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
QueueHandle_t Test_Queue =NULL;
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
#define QUEUE_LEN 4 /* 队列的长度,最大可包含多少个消息 */
#define QUEUE_SIZE 4 /* 队列中每个消息大小(字节) */
//一些函数声明
static void AppTaskCreate(void);/* 用于创建任务 */
static void LED_Task(void* pvParameters);/* LED_Task任务实现 */
static void All_Function_Init(void);/* 用于初始化板载相关资源 */
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
All_Function_Init();//硬件初始化
while (1)
{
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
}
}
//任务创建函数
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建Test_Queue */
Test_Queue = xQueueCreate((UBaseType_t ) QUEUE_LEN,/* 消息队列的长度 */
(UBaseType_t ) QUEUE_SIZE);/* 消息的大小 */
if(NULL != Test_Queue)
printf("Test_Queue消息队列创建成功!\r\n");
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED_Task, /* 任务入口函数 */
(const char* )"LED_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LED_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED_Task任务成功!\r\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
static void LED_Task(void* parameter)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
uint32_t r_queue; /* 定义一个接收消息的变量 */
while (1)
{
/* 队列读取(接收),等待时间为一直等待 */
xReturn = xQueueReceive( Test_Queue, /* 消息队列的句柄 */
&r_queue, /* 发送的消息内容 */
portMAX_DELAY); /* 等待时间 一直等 */
if(pdPASS == xReturn)
{
printf("触发中断的是 KEY%d !\r\n",r_queue);
}
else
{
printf("数据接收出错!\r\n");
}
Toggle_LED_R();
}
}
//初始化声明
static void All_Function_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
USART_Config();
//按键初始化
Key_GPIO_Config();
//外部中断初始化
EXTI_Config();
}
3.5 实验现象
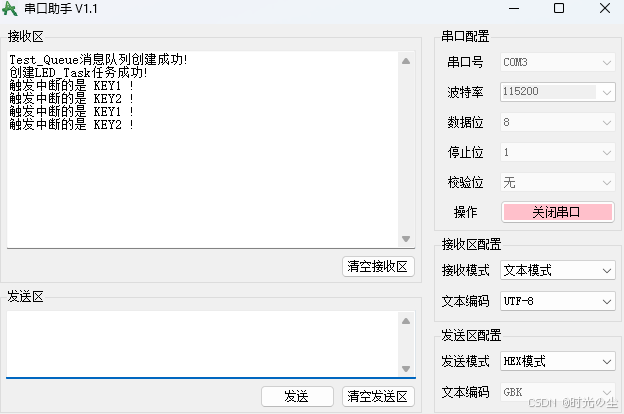
可以看到数据正常传输。
完整工程:




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











