







课题名称:
基于改进A星算法的无人机三维地图路径规划
版本时间:
2024-04-22
程序运行:
直接运行AStar.m 文件即可
代码获取方式(付费):
QQ:491052175
VX:Matlab_Lover
改进方向:
预估函数增加权重值和偏移量进行调整
特殊说明:
地图创建可直接使用标准地图或者用户自定义地图尺寸随机生成地图
仿真结果:
图1 标准A星的无人机路径规划

图2 改进A星的无人机路径规划
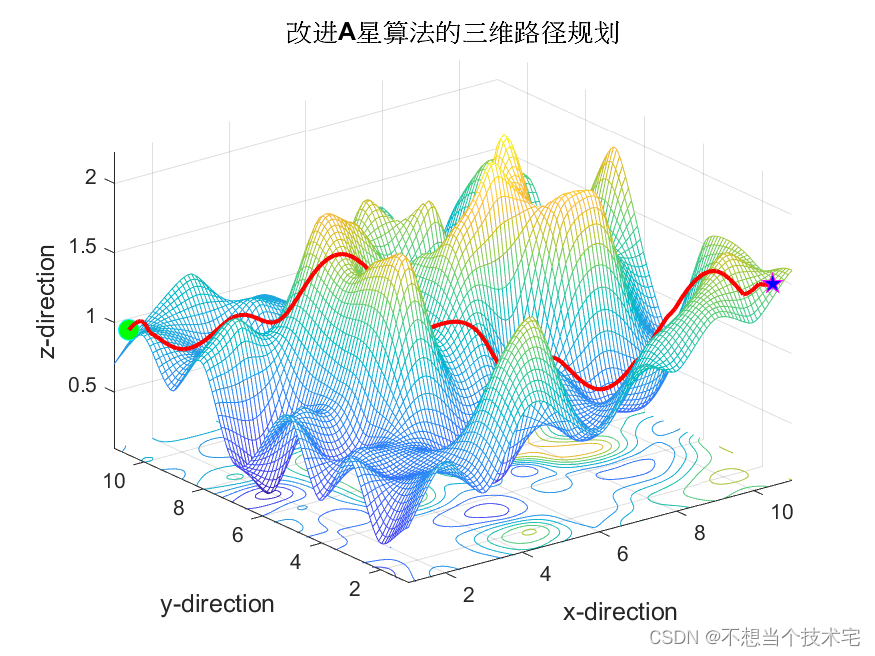
图3 标准A星和改进A星的无人机路径规划
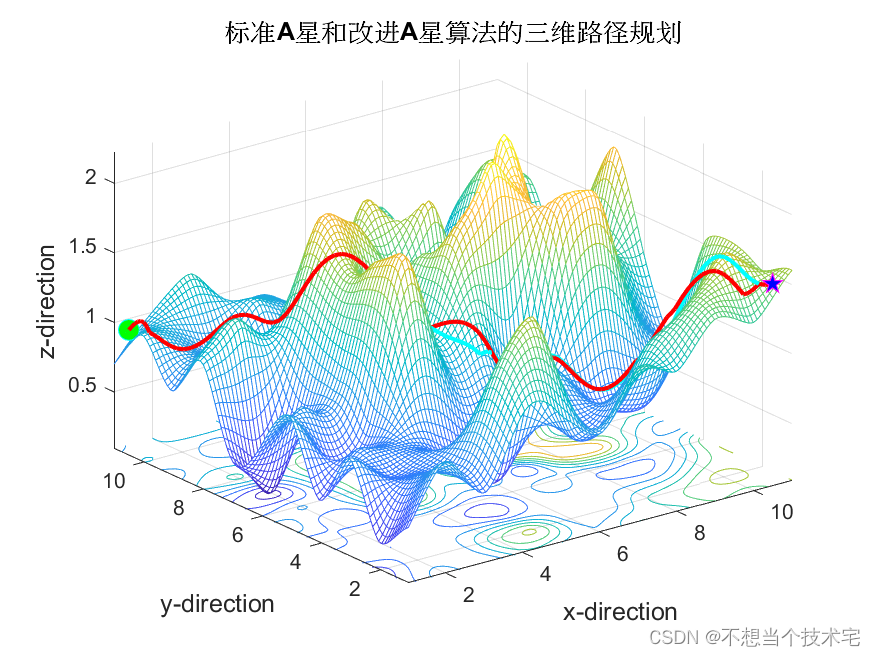
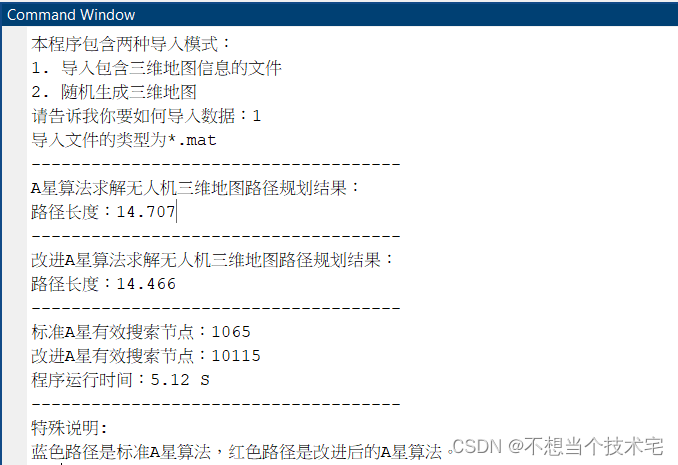
图4 仿真结果
基于改进A星算法的无人机三维地图路径规划
2024-04-22
直接运行AStar.m 文件即可
QQ:491052175
VX:Matlab_Lover
预估函数增加权重值和偏移量进行调整
地图创建可直接使用标准地图或者用户自定义地图尺寸随机生成地图
图1 标准A星的无人机路径规划
图2 改进A星的无人机路径规划
图3 标准A星和改进A星的无人机路径规划
图4 仿真结果
 1174
1174

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























