






carsim+simulink联合仿真实现变道
包含路径规划算法+mpc轨迹跟踪算法
可选simulink版本和c++版本算法
可以适用于弯道道路,弯道车道保持,弯道变道
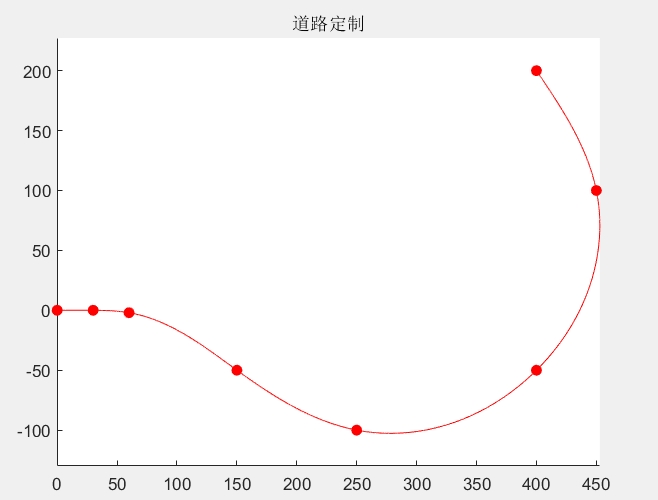
carsim内规划轨迹可视化
Carsim2020.0
Matlab2017b
YID:67150635596250714
autorobot

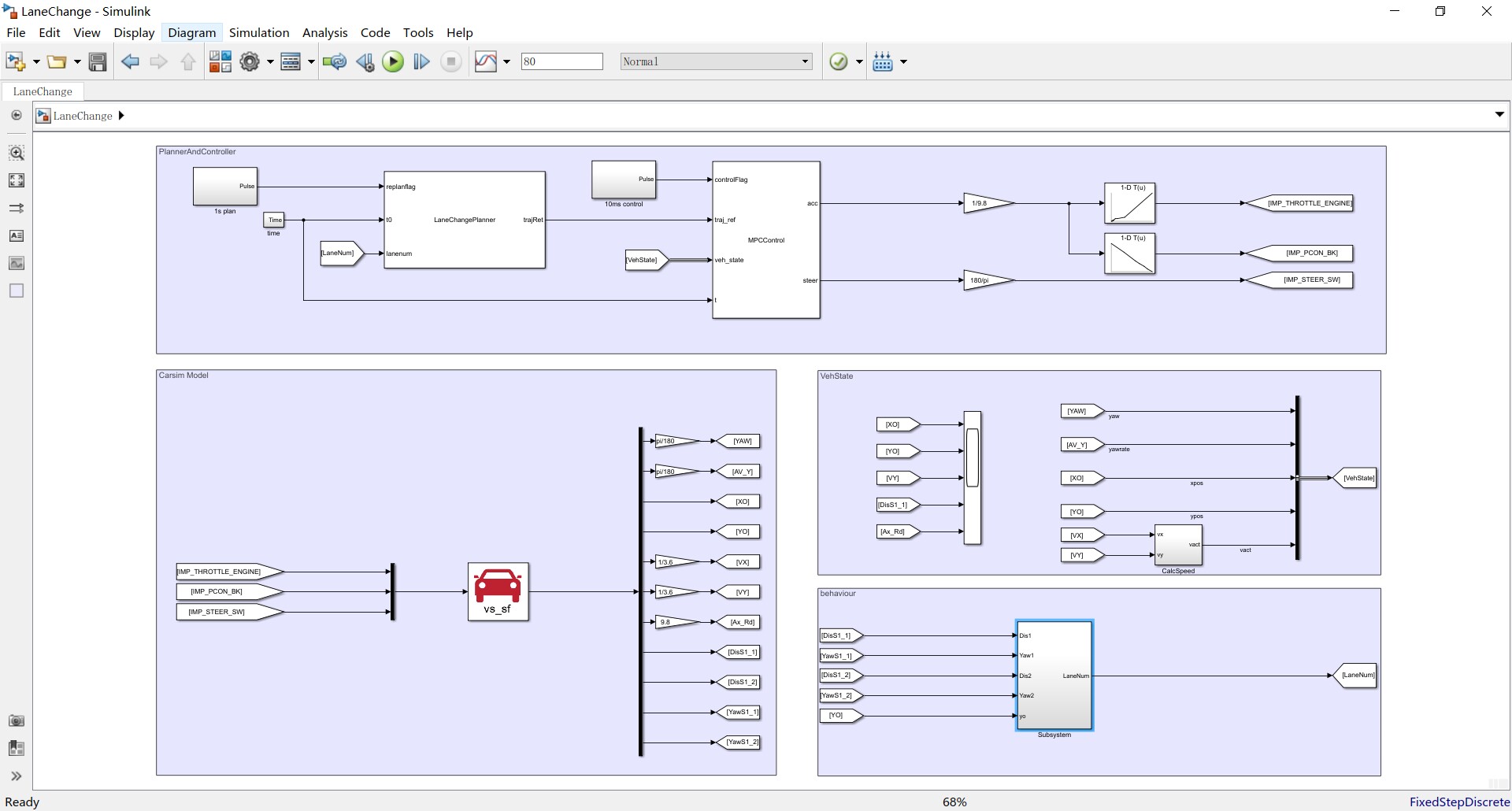
在现代交通系统中,自动驾驶技术是一个备受关注的热门话题。自动驾驶技术的发展不仅可以提高交通效率,还可以减少交通事故的发生。在自动驾驶技术中,路径规划和车辆控制是两个关键的环节。本文将介绍一种基于Carsim和Simulink联合仿真的变道系统,该系统包含路径规划算法和MPC轨迹跟踪算法,并可选用Simulink版本和C++版本的算法。此外,该系统可以适用于弯道道路、弯道车道保持和弯道变道场景,并且Carsim内的规划轨迹可视化,支持Carsim2020.0和Matlab2017b版本。
首先,让我们来了解一下Carsim和Simulink的基本概念。Carsim是一种车辆动力学仿真软件,它可以模拟车辆在不同道路条件下的行驶情况。Carsim可以通过输入车辆的物理参数和控制信号,模拟车辆的运动轨迹和动力学特性。Simulink是一种MATLAB的扩展工具,它可以用来建立、仿真和分析动态系统的模型。在Simulink中,我们可以使用不同的模块来构建车辆的控制系统,例如路径规划算法和MPC轨迹跟踪算法。
变道是车辆行驶中常见的动作之一。在传统的驾驶模式下,司机需要通过调整方向盘和踩油门来完成变道动作。但在自动驾驶模式下,车辆需要通过算法来完成变道动作。为了实现自动驾驶的变道功能,我们需要设计一种有效的路径规划算法和车辆控制算法。
路径规划算法是自动驾驶系统中的关键环节,它可以根据输入的车辆位置和目标位置,计算出最优的行驶路径。在本系统中,我们使用一种先进的路径规划算法来实现车辆的变道动作。该算法可以考虑道路的几何形状、车辆的物理参数以及交通规则等因素,从而生成合理的变道路径。
MPC轨迹跟踪算法是一种常用的车辆控制算法,它可以根据车辆的动力学模型和当前状态,计算出最优的控制指令。在本系统中,我们将MPC轨迹跟踪算法应用于车辆的变道控制中,以实现平稳而精确的变道动作。通过实时获取车辆的状态信息,并根据目标路径来计算出最优的控制指令,我们可以保证车辆在变道过程中的安全性和稳定性。
此外,本系统提供了两种版本的算法:Simulink版本和C++版本。Simulink版本适用于在Simulink环境下进行仿真和调试,它具有较高的可视化性和易用性。而C++版本适用于在实际车辆中进行部署和运行,它具有较高的实时性和性能优势。
最后,本系统还支持弯道道路、弯道车道保持和弯道变道场景。在弯道道路中,车辆需要根据道路的几何形状和车辆的物理参数,进行合理的行驶轨迹规划。在弯道车道保持场景中,车辆需要通过控制算法来保持在弯道车道上的稳定行驶。在弯道变道场景中,车辆需要通过控制算法来完成平稳而精确的变道动作。
综上所述,本文介绍了一种基于Carsim和Simulink联合仿真的变道系统。该系统包含路径规划算法和MPC轨迹跟踪算法,并可选用Simulink版本和C++版本的算法。该系统可以适用于弯道道路、弯道车道保持和弯道变道场景,并且Carsim内的规划轨迹可视化,支持Carsim2020.0和Matlab2017b版本。通过该系统,我们可以实现自动驾驶车辆的安全、稳定和精确的变道动作,为未来智能交通系统的发展做出贡献。
【相关代码,程序地址】:http://lanzoup.cn/635596250714.html















 1054
1054











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









