






UR5机器人仿真 机械臂simulink simscape
正向运动学,逆向运动学
关节空间轨迹规划 五次多项式轨迹规划
笛卡尔空间轨迹规划 直线插补
还包含机器人工具箱建立的模型对比
UR5机器人仿真 机械臂simulink simscape 正向运动学,逆向运动学 关节空间轨迹规划 五次多项式轨迹规划 笛卡尔空间轨迹规划 直线插补
还包含机器人工具箱建立的模型对比
随着机器人技术的不断发展,机器人仿真已经成为了机器人领域中非常重要的研究方向之一。机器人仿真可以减少对实际机器人的依赖,降低实验成本,同时也可以提高研究效率和可行性。
在机器人仿真的过程中,UR5机器人是常见的机器人之一,其具有六个自由度,因此在仿真中具有很高的灵活性,可以模拟出很多实际的机器人操作场景。
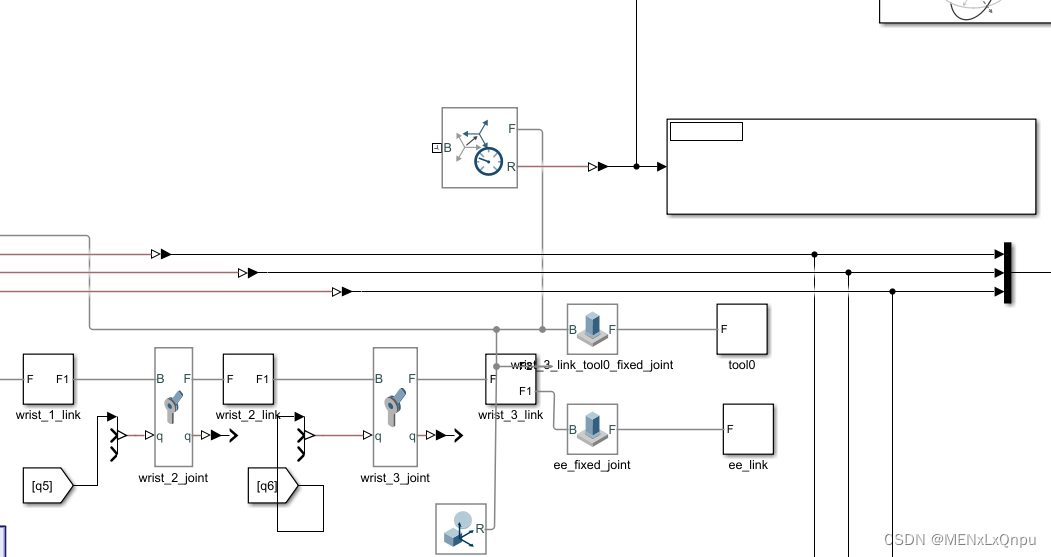
在UR5机器人仿真中,其机械臂可以使用Simulink和Simscape进行建模和仿真,这两个工具都是MATLAB的模块,可以方便地进行机器人运动学和动力学建模。
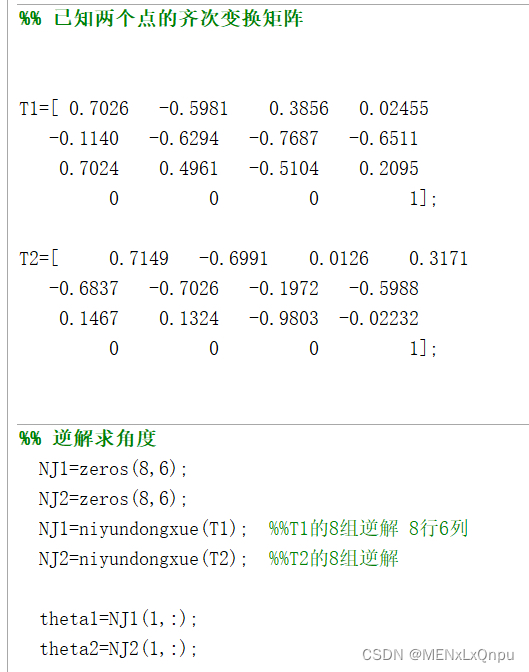
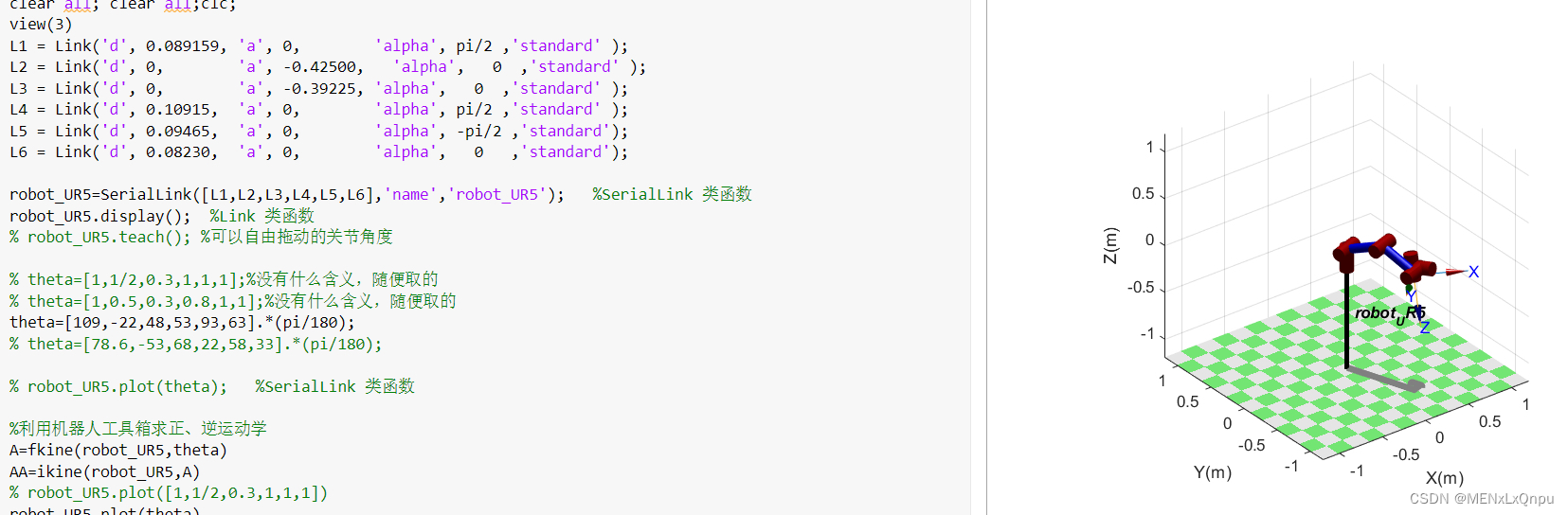
在机器人的运动学中,正向运动学和逆向运动学都是非常重要的内容。正向运动学主要是将关节角度转化为末端位姿,而逆向运动学则是将末端位姿转化为关节角度。这两种运动学方法在机器人的控制中起到了非常重要的作用。
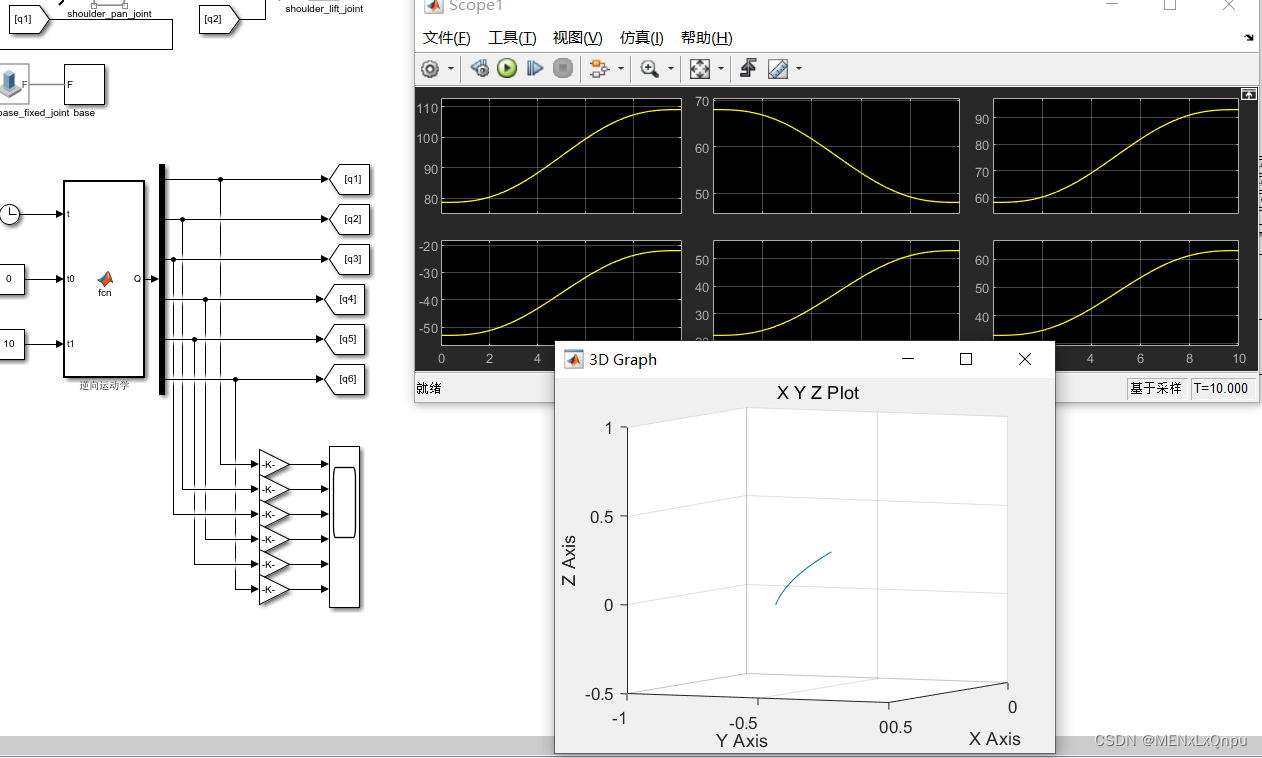
另外,在机器人的轨迹规划中,关节空间轨迹规划和笛卡尔空间轨迹规划也是非常重要的内容。关节空间轨迹规划是指在关节空间内规划机器人的轨迹,而笛卡尔空间轨迹规划则是指在笛卡尔空间内规划机器人的轨迹。其中,五次多项式轨迹规划比较常用,因为它可以控制机器人的加速度和速度,从而实现较为平滑的运动。
另外,直线插补也是在机器人实际操作中非常常见的运动方式,可以在笛卡尔空间中实现机器人的直线运动。在机器人轨迹规划中,可以根据实际需要进行选择,以实现最佳的运动效果。
最后,机器人工具箱的建立也是进行机器人仿真的重要一步。通过建立机器人模型,可以方便地进行仿真测试、优化和验证,从而提高机器人的运动控制性能和操作精度。
综上所述,UR5机器人仿真在机器人领域中具有非常重要的研究价值。通过Simulink和Simscape进行建模和仿真,可以方便地进行机器人运动学和动力学建模,并且可以实现正向运动学、逆向运动学、关节空间轨迹规划、笛卡尔空间轨迹规划、直线插补等操作方式。建立机器人工具箱模型,可以方便地进行仿真测试和优化,从而提高机器人控制性能和操作精度。
相关代码,程序地址:http://lanzouw.top/668334912143.html















 457
457











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









