






线控转向技术解析:深入探讨路感模拟与力矩控制
一、引言
随着汽车技术的不断进步,线控转向作为车辆智能驾驶的重要部分,其在提高驾驶体验和操控性方面扮演着越来越重要的角色。本篇文章将围绕线控转向的路感模拟及力矩控制进行深入的技术分析。
二、线控转向概述
线控转向是一种先进的汽车转向,通过电子控制单元(ECU)的精确控制,实现了转向力矩的精确调节和驾驶体验的个性化调整。它能够模拟真实的驾驶感觉,提供更加精准的操控反馈,从而提高驾驶的安全性和舒适性。
三、路感模拟及力矩控制技术分析
- 路感模拟算法设计
为了实现线控转向的路感模拟,我们通过参数拟合的方式设计了一种基于道路状况的路感模拟算法。该算法能够根据不同的道路条件,如弯道、直线等,自适应地调整转向力矩,以提供更加真实和个性化的驾驶体验。
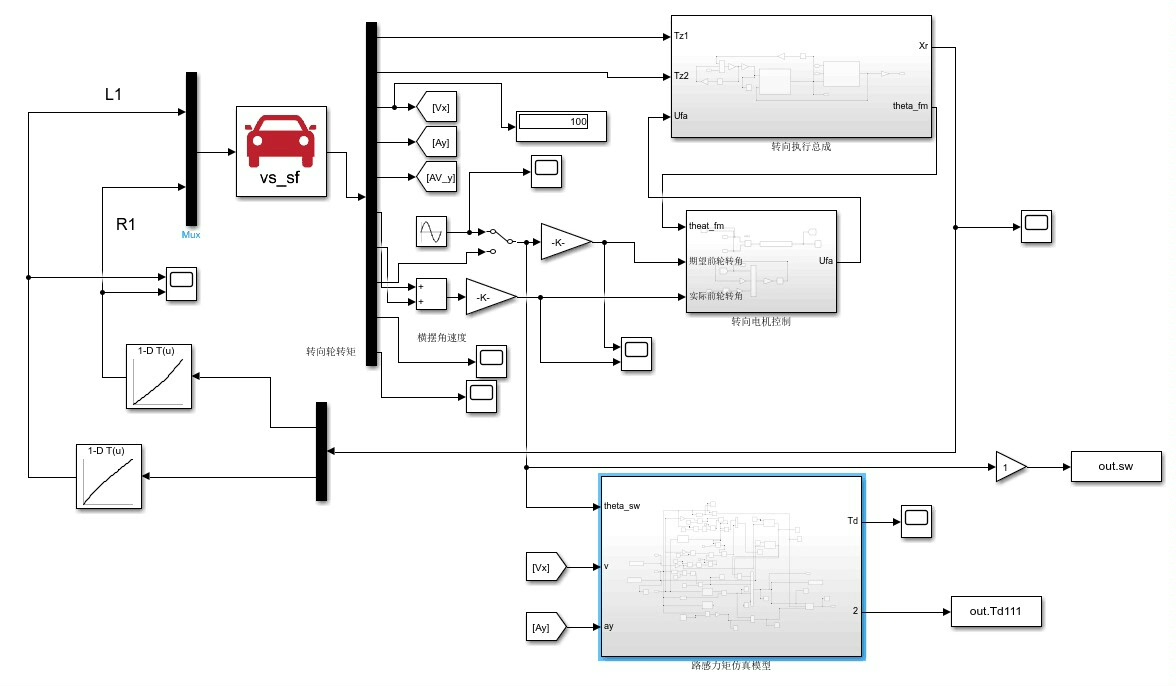
在Simulink中建立仿真模型是进行路感模拟及力矩控制的重要步骤。通过搭建仿真模型,我们可以模拟实际的道路状况,进行相关参数的测试和调整。此外,我们还利用先进的算法优化模型,以提高仿真结果的准确性和可靠性。
- 双纽线工况和中心区工况路感力矩验证
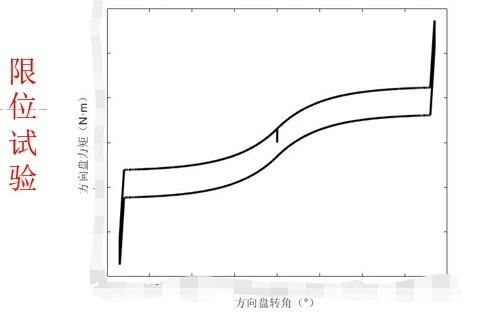
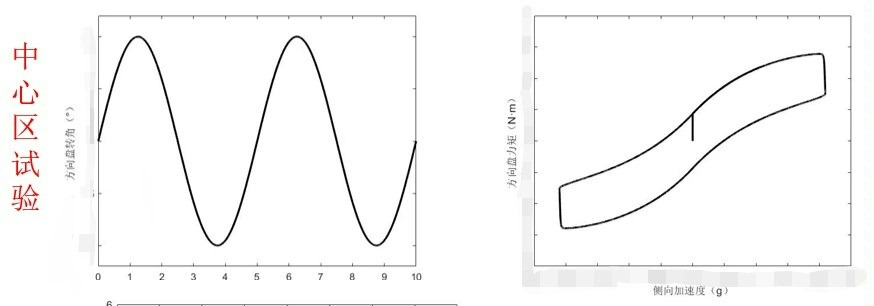
在模型建立后,我们进行了双纽线工况和中心区工况的路感力矩验证。通过实际的道路测试,我们可以获得不同工况下的路感力矩数据,为后续的力矩控制提供依据。
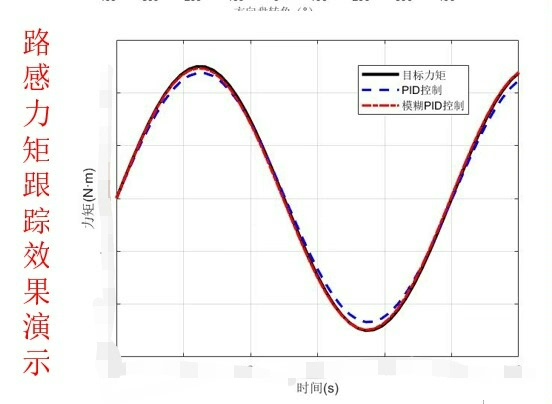
通过PID控制和模糊PID控制等方式,我们对路感力矩进行了有效的控制。PID控制是一种经典的控制器设计方法,能够根据被控对象的数学模型进行快速准确的调整。模糊PID控制则是一种结合了模糊逻辑和PID控制的复合控制方法,能够更好地适应复杂多变的工作环境。
四、所有效果展示
- 仿真模型展示:通过Simulink建立的线控转向仿真模型,我们可以模拟各种道路状况下的转向力矩变化情况。同时,我们还可以对仿真结果进行参数测试和调整,以提高仿真结果的准确性和可靠性。
- 路感模拟效果展示:通过实际的路感测试数据,我们可以直观地看到线控转向的路感模拟效果。不同的道路状况下,线控转向能够提供更加真实和个性化的驾驶体验。
- 力矩控制效果展示:通过实际的控制效果测试数据,我们可以看到PID控制和模糊PID控制等方式对路感力矩的控制效果。这些控制方式能够根据不同的工况和环境进行自适应调整,以提高的稳定性和可靠性。
五、结论
综上所述,线控转向的路感模拟及力矩控制是一项复杂而重要的技术工作。通过参数拟合设计路感模拟算法、建立仿真模型并进行实际的路感测试和数据展示等步骤,我们可以更好地理解线控转向的工作原理和性能特点。同时,我们也需要不断探索和创新,提高线控转向的性能和稳定性,以满足汽车行业不断发展的需求。
线控转向路感模拟及路感力矩控制
通过参数拟合设计线控转向路感模拟算法,在simulink中建立仿真模型。
模型建立后,验证双纽线工况和中心区工况的路感力矩。
通过PID,模糊PID对路感力矩进行控制。
所有效果如图



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









