






线控转向车辆的路感反馈控制
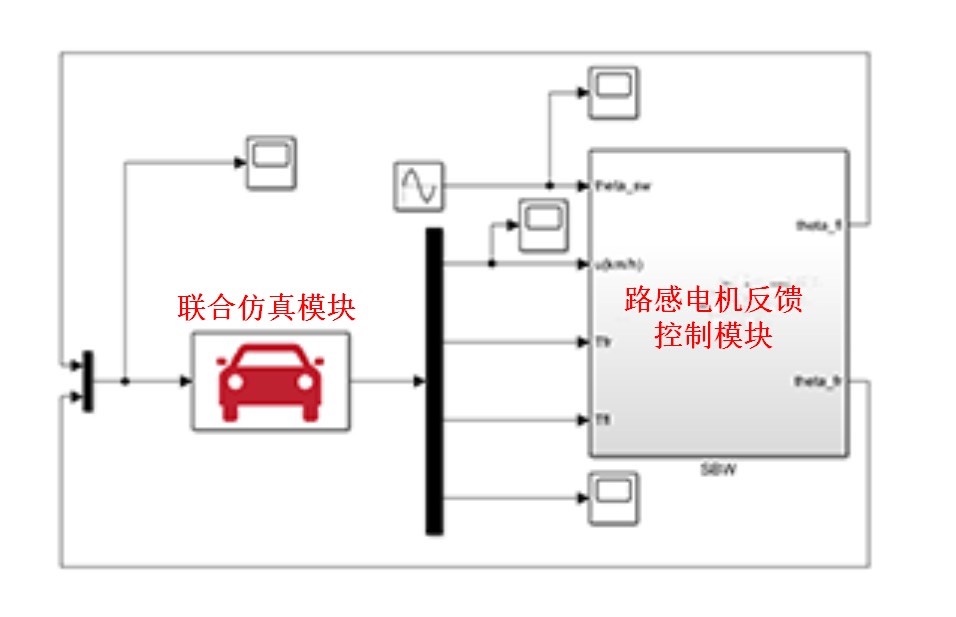
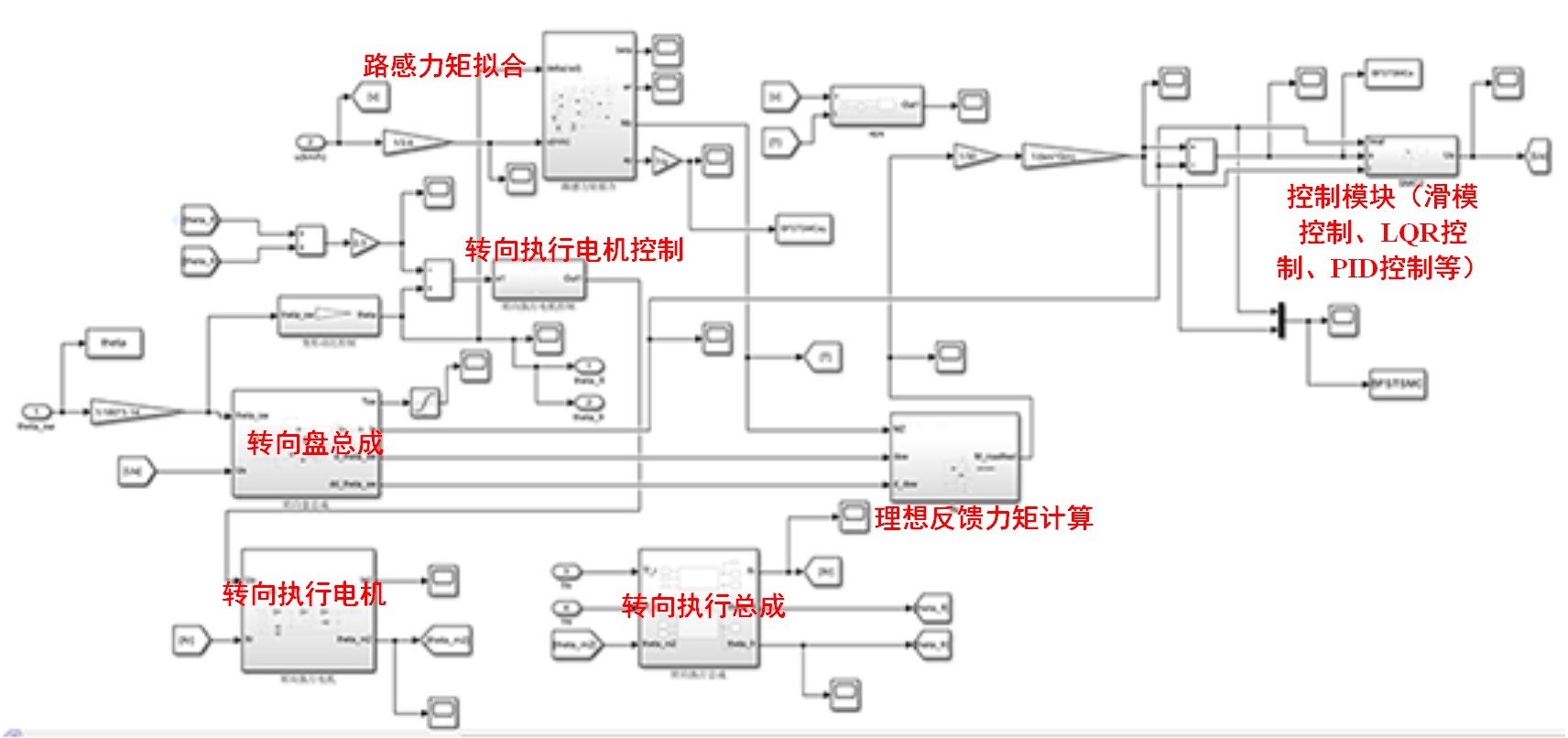
线控车辆的路感电机反馈控制:分别进行路感电机力矩的拟合,由转向盘总成得到转向阻力矩等,进一步得到理想路感反馈力矩,采用滑模控制、PID控制、LQR控制等跟随理想反馈力矩。
由Simulink和CarSim联合仿真,效果良好。
保证运行成功。
ID:31229756924285508
爱生气的二狗


线控转向车辆的路感反馈控制是现代汽车技术中一个重要的研究方向。随着汽车自动化程度的不断提高,线控转向车辆能够提供更精确的操控性能和驾驶体验。本文将围绕线控车辆的路感电机反馈控制展开讨论,探究如何通过拟合路感电机力矩并跟随理想反馈力矩来实现线控转向车辆的路感反馈控制。
在线控车辆中,线控转向系统是实现车辆转向的核心组件。路感电机是线控转向系统中重要的驱动部件,通过对转向盘总成的转向阻力矩等因素进行拟合,可以得到理想的路感反馈力矩。为了准确地控制线控转向车辆的路感反馈,我们采用滑模控制、PID控制和LQR控制等方法来跟随理想反馈力矩。
滑模控制是一种非线性控制方法,通过引入滑模面来消除系统的不确定性和扰动。在线控转向车辆的路感反馈控制中,滑模控制可以有效地实现对理想反馈力矩的跟踪。通过设计合适的滑模面和控制律,可以使得路感电机输出的力矩与理想反馈力矩保持一致,从而提高车辆的操控性能和驾驶舒适性。
PID控制是一种经典的线性控制方法,通过比例、积分和微分三个控制环节来调节输出与期望值之间的误差。在线控转向车辆的路感反馈控制中,PID控制可以根据线控车辆的实际反馈力矩和理想反馈力矩的差异,调整路感电机的输出力矩,从而实现精准的路感反馈。
LQR控制是一种基于最优控制理论的方法,通过设计状态反馈矩阵和输出反馈矩阵,来最小化系统的性能指标。在线控转向车辆的路感反馈控制中,LQR控制可以通过调整反馈矩阵的权重,使得路感电机的输出力矩与理想反馈力矩之间的误差最小化,从而实现良好的路感反馈效果。
为了验证线控转向车辆的路感反馈控制策略的有效性,我们采用Simulink和CarSim软件进行联合仿真。通过建立线控转向车辆的模型,并对不同的控制策略进行仿真测试,可以直观地观察到系统的响应和性能变化。经过多次仿真实验,我们发现采用滑模控制、PID控制和LQR控制等方法的路感反馈控制策略都能够取得良好的效果,满足线控转向车辆的路感反馈要求。
综上所述,线控转向车辆的路感反馈控制是一项复杂的技术任务。通过拟合路感电机力矩并跟随理想反馈力矩的方法,结合滑模控制、PID控制和LQR控制等策略,可以实现线控转向车辆精准的路感反馈。通过Simulink和CarSim的联合仿真验证,可以进一步保证线控转向车辆的路感反馈控制策略的可行性和有效性。这对于提升线控转向车辆的操控性能和驾驶体验具有重要的意义。
以上相关代码,程序地址:http://fansik.cn/756924285508.html
















 4045
4045

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









