






 本文介绍了一种基于遗传算法的Matlab程序,用于解决有障碍物条件下的机器人路径规划问题,通过模拟生物进化过程优化最短路径。程序提供灵活的参数调整,适用于不同场景,具有实用性和可靠性。
本文介绍了一种基于遗传算法的Matlab程序,用于解决有障碍物条件下的机器人路径规划问题,通过模拟生物进化过程优化最短路径。程序提供灵活的参数调整,适用于不同场景,具有实用性和可靠性。
基于遗传算法的机器人路径规划matlab程序
根据最基本的遗传算法原理实现了有障碍物条件下的移动机器人的路径规划问题。
路径规划以最短路径为评判标准
有详细的程序使用说明,可以手动修改起点坐标,终点坐标,障碍物坐标,障碍物坐标。
ID:5965662020033273
专业算法工程师

基于遗传算法的机器人路径规划
在移动机器人领域,路径规划是一个重要的问题。为了使机器人能够在有障碍物的环境中有效地寻找最短路径,本文基于遗传算法的原理,设计了一个用于机器人路径规划的Matlab程序。
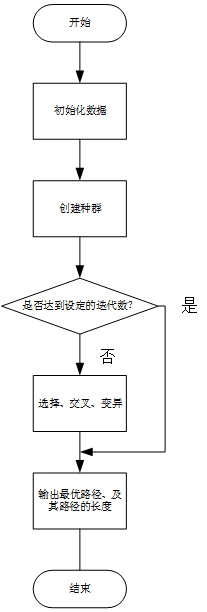
遗传算法是一种模拟自然选择和遗传机制的优化算法。它通过模拟生物进化过程,由选择、交叉和变异等操作,逐渐优化问题的解。在路径规划问题中,遗传算法可以用来搜索最优路径。
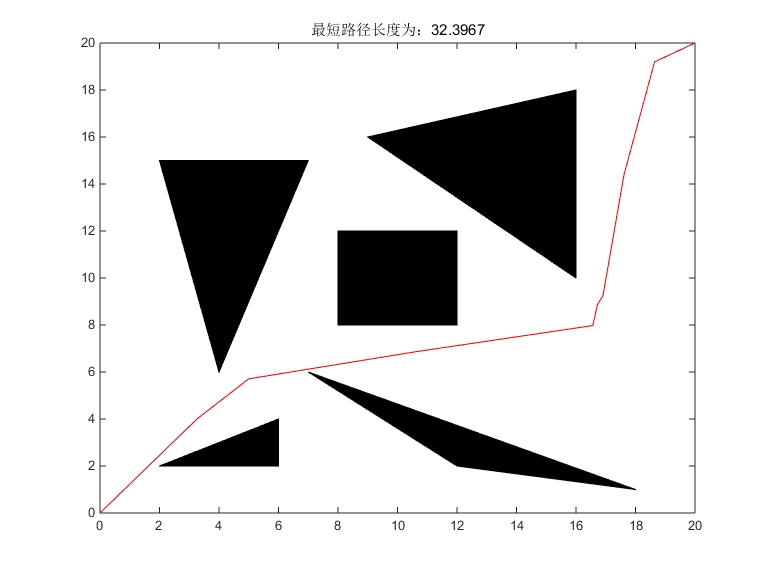
首先,我们需要定义适应度函数,以评判路径的优劣。在本程序中,我们选取最短路径作为评判标准。适应度函数会根据机器人在当前路径上的距离和障碍物的情况进行评估,越短的路径和越少的障碍物会获得更高的适应度值。
然后,我们通过遗传算法的操作,不断进化种群中的个体,以求得最优解。首先,我们初始化一个随机的种群,其中每个个体代表一条路径。然后,对种群中的个体进行选择操作,通过适应度函数来选择优秀的个体,以增加其在下一代中的出现概率。接下来,通过交叉和变异操作,产生新的个体,以增加种群的多样性。交叉操作将两个个体的染色体进行交换,变异操作则随机改变染色体中的基因。通过多次迭代,我们可以逐渐优化种群中的路径,并找到最优解。
在本程序中,我们还提供了详细的使用说明。用户可以手动修改起点坐标、终点坐标、障碍物坐标,以适应不同的场景需求。同时,我们还在程序中提供了注释,以帮助用户理解代码的实现过程。
通过这个基于遗传算法的机器人路径规划Matlab程序,我们可以在有障碍物条件下,寻找到最短路径。遗传算法的优势在于它能够避免陷入局部最优解,而能够在全局范围内进行搜索。因此,该程序在实际应用中具有较高的实用性和可靠性。
总结起来,基于遗传算法的机器人路径规划Matlab程序通过模拟生物进化的过程,有效地寻找到最短路径。它可以应用于有障碍物的环境中,能够适应不同起点、终点和障碍物的场景。该程序的设计思路和实现过程清晰明了,具有较高的可靠性和实用性。希望通过这篇文章对读者们在机器人路径规划领域有所启发,并能够引起更多的讨论与思考。
以上相关代码,程序地址:http://matup.cn/662020033273.html















 201
201











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









