






基于遗传算法的机器人路径规划matlab程序
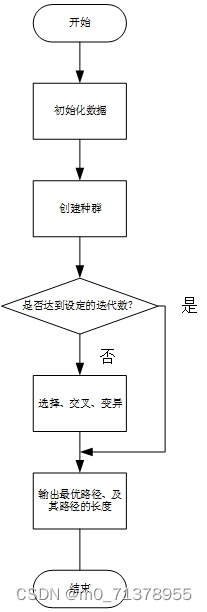
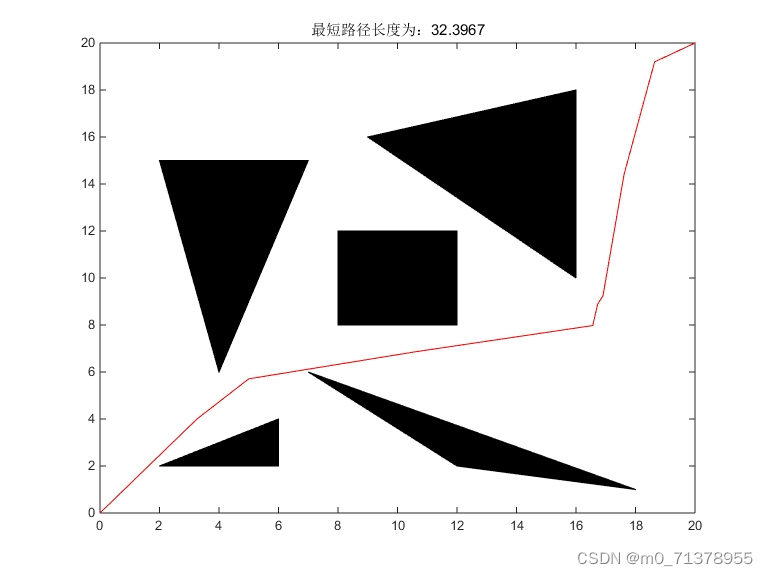
根据最基本的遗传算法原理实现了有障碍物条件下的移动机器人的路径规划问题。
路径规划以最短路径为评判标准
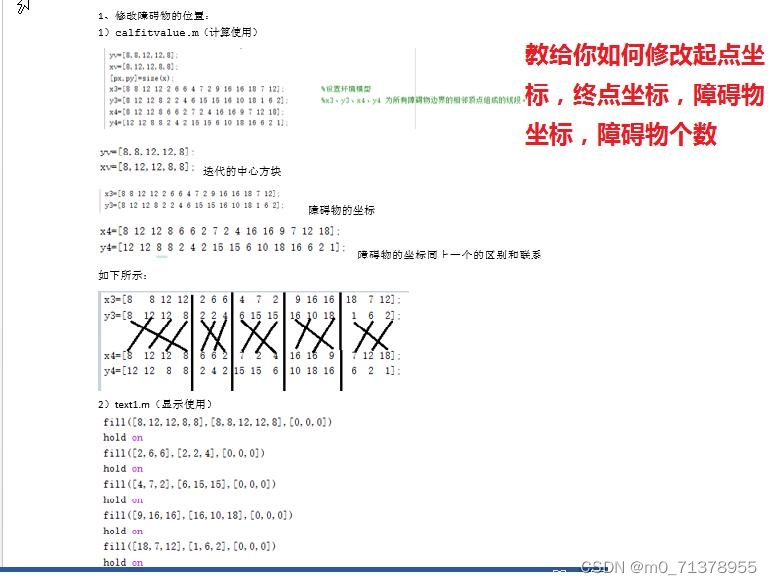
有详细的程序使用说明,可以手动修改起点坐标,终点坐标,障碍物坐标,障碍物坐标。
ID:6965 662020033273
662020033273
基于遗传算法的机器人路径规划matlab程序
根据最基本的遗传算法原理实现了有障碍物条件下的移动机器人的路径规划问题。
路径规划以最短路径为评判标准
有详细的程序使用说明,可以手动修改起点坐标,终点坐标,障碍物坐标,障碍物坐标。
ID:6965662020033273
 971
1963
971
1963











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























