







大学这几年一直在学图形学方面的知识,积累了一些原理的知识,也作过一些总结,并用word文档的方式记录下来,因为懒,不想写到博客上,前几天由于自己的手提出了问题,大量的笔记大量遗失,还好台式上还储存着,现在发现记录在网络上是最安全的,还可以和别人讨论学习,下面是我以前做的一些总结,现在把它放在一起,供大家参考,如果有什么错误的地方,希望大家批评指正,菜鸟在此先谢过各位大神。
学过图形学的人都知道,图形的变换是通过矩阵来实现的,不过这些矩阵是怎么推导过来的呢,下面我们来讨论一下:
一、缩放矩阵推导:
要对整张纹理进行变换操作,需要对图元中的每一个顶点进行处理,比如我们需要对纹理进行缩放操作,假设上三角形由v0,v1,v2组成,下三角形由v0,v2,v3组成,那么我们要对此图元进行缩放处理,就先要得到一个缩放矩阵,缩放矩阵如下图所示:
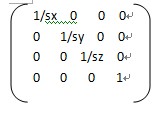
图1
如果我们要将原来的图元放大两倍,那么这个矩阵就是:
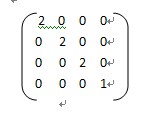
图2
这里我要对矩阵的变换操作,进行一些较为详细的讨论,为什么这个矩阵是缩放矩阵,顶点与它相乘,会发生什么样的变化?这里我们假设顶点为v[vx,vy,vz,vt],其中,vx,vy和vz为顶点在x轴,y轴和z轴上的坐标,而vt则是一个十分特别的变量,如果vt为0,那么v为向量,如果vt为1,那么v为点,为什么会有这样的定义呢?这绝对不是无中生有,我们都知道,平移向量是没有意义的,向量只是表示方位,而顶点则是表示一个具体的点,以缩放矩阵为例,我们分别把v的vt标识为1,将v’的vt标识为0,现在我们分别将v和v’与该缩放矩阵平移S相乘,并且查看结果,假设S矩阵如下所示:
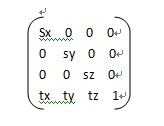
图3
V为[vx,vy,vz,1],将v与S相乘得:
Sv=[vx * Sx + tx, vy * sy + ty, vz * sz + tz, 1],从最终的顶点,我们可以知道,当vt为1时,顶点不仅实现了缩放,而且还实现了平移,下面我们来看v’与sv相乘的结果:
假设v’为[vx,vy,vz,0],那么v’与S相乘的结果为:
Sv’=[ vx * Sx, vy * sy, vz * sz, 0];与上面的结果对比,我们可以很轻易地发现,v’并没有实现平移,他只是实现了缩放而已,这个与平移向量没有意义的思想是一脉相承的,所以我们规定当向量的第四维的值为0时,其为向量,为1时,其为顶点。如果vt的值不为1,而是任意值w,那么要进行坐标操作时,想要将该向量标准化,即将v’=[vx,vy,vz,w]转化为v’[vx/w, vy/w, vz/w, 1];
在下面的演示过程当中,为了使读者更易理解,所以所有的顶点都只标出x轴和y轴坐标。
假设我们的v0={-1,1,0},v1={1,1,0}, v2={1,-1,0},v3={-1,-1,0},在缩放时,由于上三角形和下三角形有两个顶点是重合的,所以我们可以把这个整个图元看做是矩形,一般情况下,我们把变换中心设置为图元的中心位置,如下图所示:
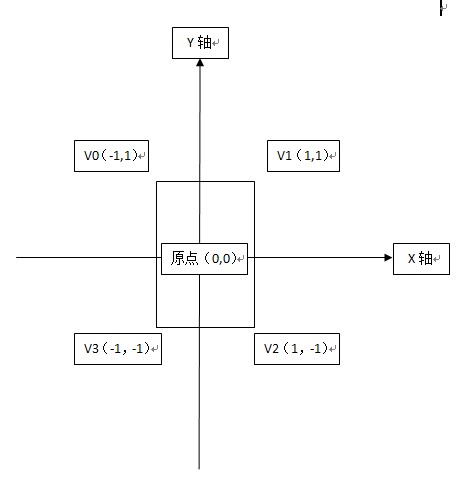
图4
正如上图所示,矩形的中间位置在坐标轴的正中间,v0~v3与这个缩放矩阵相乘后,得到的点为v0(-2,2),v1(2,2),v2(2,-2),v3(-2,-2);缩放后,如下图所示:
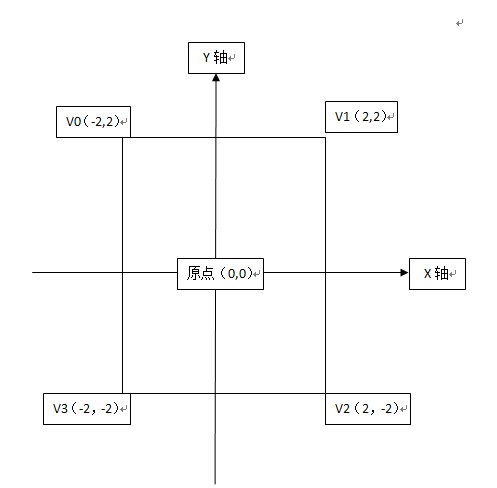
图5
以上显示的所有内容,都是在图元的局部坐标系中进行,在2D处理当中,要显示最终的纹理,我们需要将局部坐标系转化为屏幕坐标系,什么是屏幕坐标系,就是我们窗体的Client区域,如下图所示:
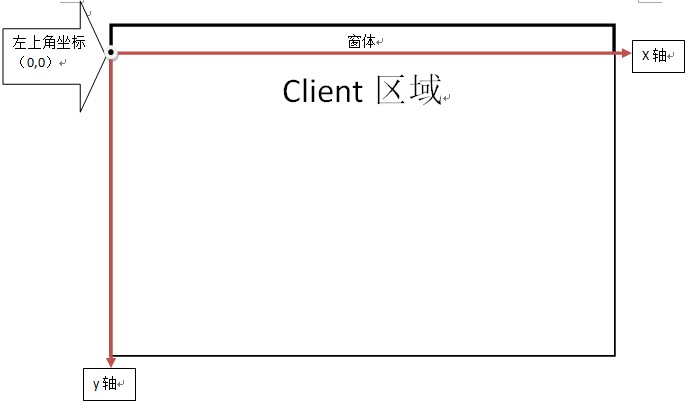
图6
要将局部坐标系转换为屏幕坐标系,我们只需要进行平移操作即可,比如,我们所进行操作的图元的在屏幕上的坐标为(100,100),那么,此时我们只需要将纹理的4个顶点,分别向右平移100个像素,再向下平移100个像素,如下图所示:
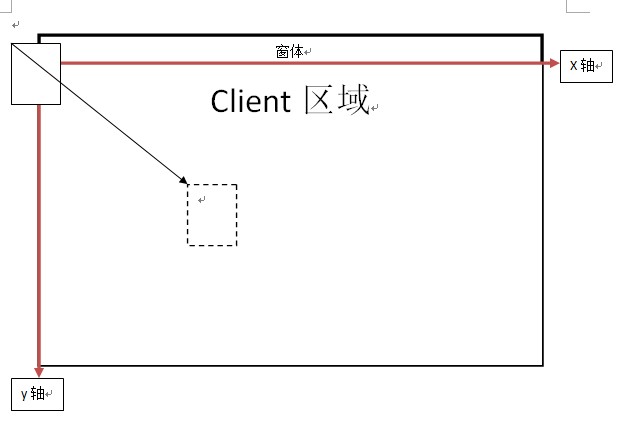
图7
现在一切都很清楚了,其实所谓的缩放,其实就是在原点将所有的图元顶点,乘以同一个缩放矩阵,然后再将所有的顶点平移像素坐标中的位置。
二、旋转矩阵推导1、绕特殊轴旋转(如x、y、z轴,这里只讨论z轴的情况,其他情况原理一致)
同理,旋转矩阵也一样的原理,下面我们来看一下旋转矩阵的构造:
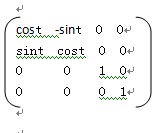
图8
上图所示的矩阵是绕z轴顺时针旋转t度的矩阵,以上图元只需要将所有的顶点乘以这个矩阵,即可实现旋转。
这个矩阵是怎么来的呢?现在我们来推导一下,其实绕x,y或z轴旋转的矩阵很容易推导,比绕任意轴旋转的矩阵要容易得多,绕任意轴矩阵推导,我已经将那个推导的方法上传到“DirectX游戏开发”和“OpenGL/DirectX”qq群里了,有兴趣的可以去下载,群号分别是185017593和63675788。
言归正传,现在我们来推导这个矩阵,首先假设存在向量v[vx,vy, 0, 0];现在我们要让v绕z轴顺时针旋转θ度,如下图所示:
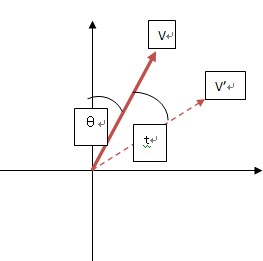
图9
要实现v向v’绕z轴顺时针旋转t度,直接去计算是十分有困难的,这里我们将借助三角函数来实现,首先我们设|v|=r,那么通过三角函数,我们可以得到下面的关系:
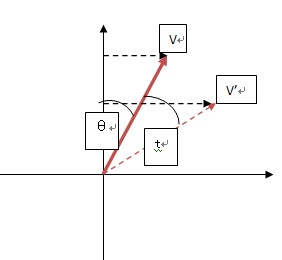
图10
Sinθ = vx / r;
cosθ = vy / r;
因为θ和t都是已知的角度,现在我们可以通过sin(θ+t)和cos(θ+t)来间接求解,因为vx’= sin(θ+t),vy’ = cos(θ+t);
sin(θ+t) = sinθ*cost + sint*cosθ;
cos(θ+t) = cosθ*cost – sinθ*sint;
容易得到:
Vx’/ r = vx / r *cost + vy / r *sint;
Vy’/ r = vy / r *cost – vx / r * sint;
根据矩阵的计算方法,我们可以逆推得到矩阵M:
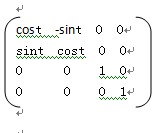
图11
现在我们将v[vx, vy,0, 0]向量与矩阵M相乘,验证结果,结果为:
V’[vx * cost + vy *sint, vy * cost – vx * sint, 0, 0],结果完全正确。下面我们来演示图元旋转的一些步骤,这里我只给出图形说明,不给出详细的文字说明:
步骤一:建立图元的局部坐标系:
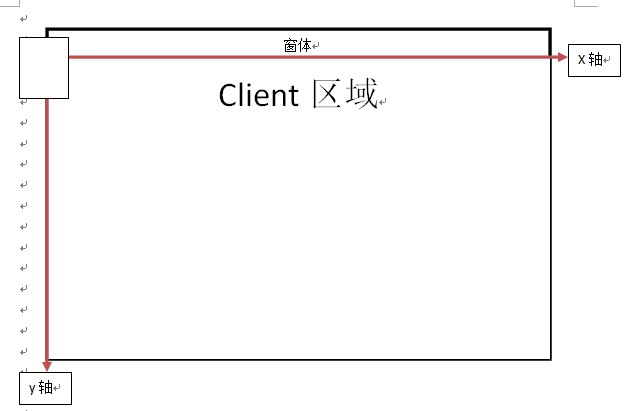
图12
步骤二:将每一个顶点与旋转矩阵相乘,实现旋转:
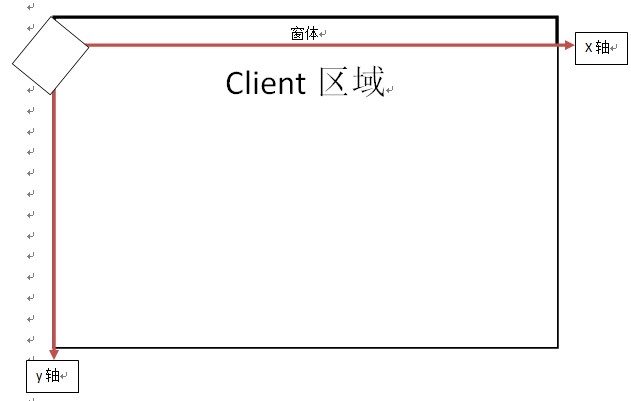
图13
步骤三:平移到其该去的地方:
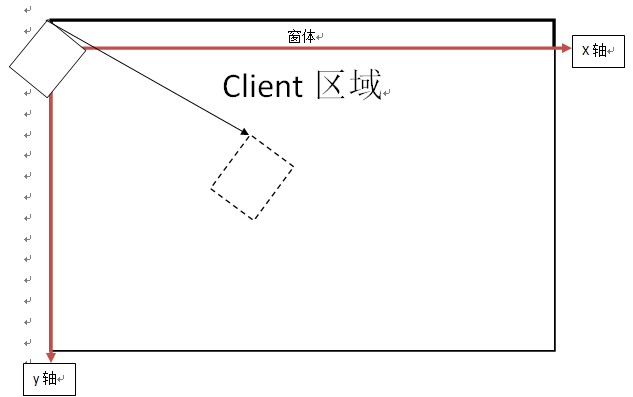
图14
现在我们已经完成了缩放和旋转的变换原理,还有一定就是平移,其实平移是那么多变换里最简单的一种,只需要对顶点的x,y或z坐标加上要移动的值就可以实现平移,这里不再赘述.
2、绕任意轴旋转:
关于绕任意轴旋转的内容,网络上有很多类似的文章,我也看了一些,不过由于叙述方式非常简略,所以我当时也是真心没看懂,直到遇到了《3D数学基础:图形与游戏开发》这本书,再结合自己所学的数学知识,现在基本上能够弄明白这个推导过程。现在我们来推导这个过程:
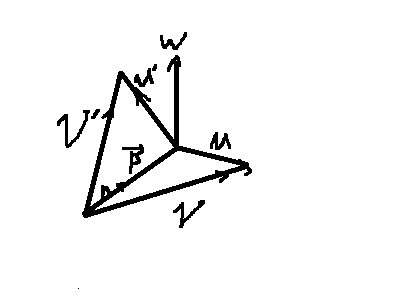
图15
假设向量V绕任意轴N旋转θ度,为了简化操作,这里直接在与向量N垂直的二维平面上进行讨论,如上图所示,我们将V设置为要旋转的向量,P为V在N方向上的投影,V,U为与N垂直的向量,且P+U=V,W为N×U,且|W|=|U|;(这里的N为单位向量),现在我们来讨论投影截面:
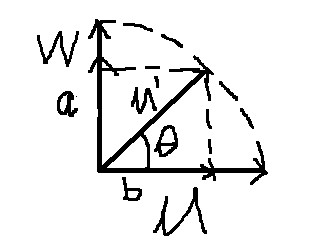
图16
由于U’由U逆时针旋转θ所得,所以|W|=|U|=|U’|,设U’在W处的投影投影向量为a,在U上的投影向量为b,则有:
cosθ=|b|/|U’|
sinθ=|a|/|U’|
等价于:
|b|=|U’|*cosθ;
|a|=|U’|*sinθ
因为|W|=|U|=|U’|,且a与W同向,b与U同向;则有:
|a|=|W|*sinθ
|b|=|U|*cosθ
又有:U’=a+b;则 U’=Sinθ*W+cosθ*U; (1)
现在,是要将(1)式转化为只有V和N的式子,
U=V-P;
因为P为V在N上的投影,现在我们来推导一下投影的公式;
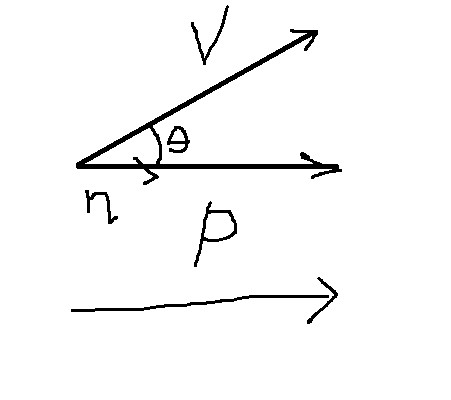
图17
如上图,P为V在N向量上的投影,设θ为V与N向量的夹角,
cosθ=|P|/|V|
|P|=cosθ|V|
P=N*(|P|/|N|);
又P=cosθ|V|
则有:
P=N*(cosθ*|V|)/|N|=N*(cosθ|V||N|)/|N|^2=N*(V.N)/|N|;
这里的N为单位向量,所以式子可以简化为:P=N(V.N);
U=V-P;
U=V-N(V.N);
W=N×U=N×(V-P)=N×V-N×P=N×V-0=N×V; (2)
现在回来看(1)式,则有:
U’=Sinθ*W+cosθ*U;
将(2)式代入(1)得:
V’=P+U=N(V.N)+sinθ*(N×V)+cosθ*(V-N(V.N))
=cosθ*(V-N(V.N))+sinθ*(N×V)+N(V.N); (3)
现在把它矩阵化:
设单位矩阵I为:
1 0 0
0 1 0
0 0 1
令Px=[1 0 0]; Py=[0 1 0]; Pz=[0 0 1];
则I=
|Px|
|Py|
|Pz|
将Px代入(3)式得:
(Px-Px(Px.N))cosθ+sinθ(N×Px)+N(Px.N),经过计算得到如下式子;
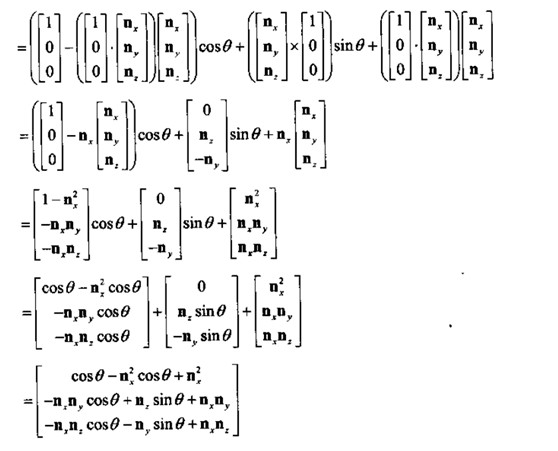
图18
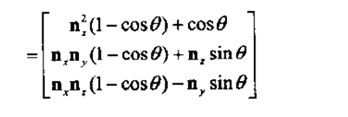
图19
依次类推,将Py和Pz分别代入(3)得:
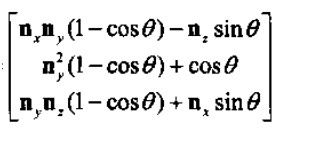
图20
和
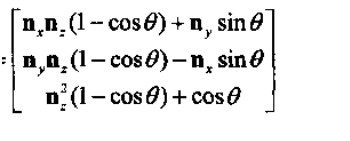
图21
最终结果为:

图22
证毕















 2315
2315

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









