






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
UR10e机械手的路径规划是指确定机械手从起始点到目标点之间的最佳运动路径的过程。这个过程涉及到考虑到机械手的动力学、约束条件以及环境的特性,以确保机械手能够安全、高效地完成任务。 首先,确定机械手的起始点和目标点,以及任务的要求和约束条件。这可能包括目标位置、姿态、运动速度、避障要求等。 通过算法和技术,计算机械手从起始点到目标点的最佳路径。这包括对机械手关节空间、笛卡尔空间或工具坐标系进行规划,以满足任务的需求和约束条件。 在路径规划过程中,需要考虑到避免与环境中的障碍物发生碰撞。因此,需要进行碰撞检测,并相应调整路径,以确保机械手的安全移动。 通过优化算法,对计算得到的路径进行优化,以最大化机械手的效率和性能。这可能涉及到最小化运动时间、最小化能量消耗或最小化轨迹偏差等目标。UR10e机械手的路径规划是一个复杂的过程,涉及到多个方面的考虑和技术,但通过合适的算法和方法,可以实现高效、安全地完成各种任务。
📚2 运行结果

主函数部分代码:
r0 = [0,0];
rf = [3,2];
vc = [2,3];
[x1,y1,vx1,vy1,ax1,ay1,fx1,fy1] = start_to_const(0.2,r0,vc);
[x2,y2,vx2,vy2,ax2,ay2,fx2,fy2] = const(0.2,0.8,fx1,fy1,vc);
[x3,y3,vx3,vy3,ax3,ay3] = const_to_stop(0.8,1,fx2,fy2,vc,rf);
t1 = linspace(0,0.2,500);
t2 = linspace(0.2,0.8,500);
t3 = linspace(0.8,1,500);
figure(1);
subplot(2,1,1)
plot(t1,x1,t2,x2,t3,x3);
xlabel("Time");
ylabel("X");
title("Distance x vs Time");
subplot(2,1,2)
plot(t1,y1,t2,y2,t3,y3);
xlabel("Time");
ylabel("Y");
title("Distance y vs Time");
figure(2);
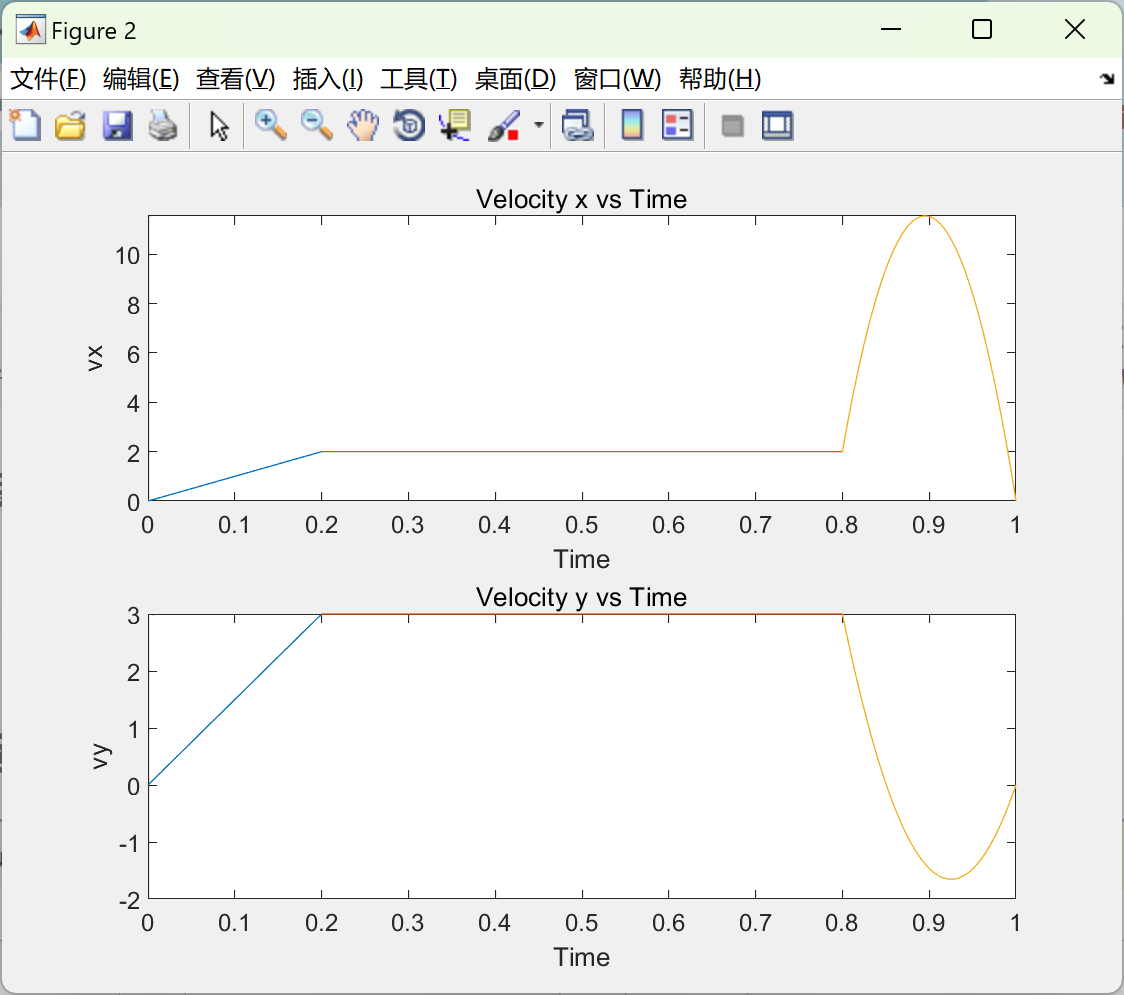
subplot(2,1,1)
plot(t1,vx1,t2,vx2,t3,vx3);
xlabel("Time");
ylabel("vx");
title("Velocity x vs Time");
subplot(2,1,2)
plot(t1,vy1,t2,vy2,t3,vy3);
xlabel("Time");
ylabel("vy");
title("Velocity y vs Time");
figure(3);
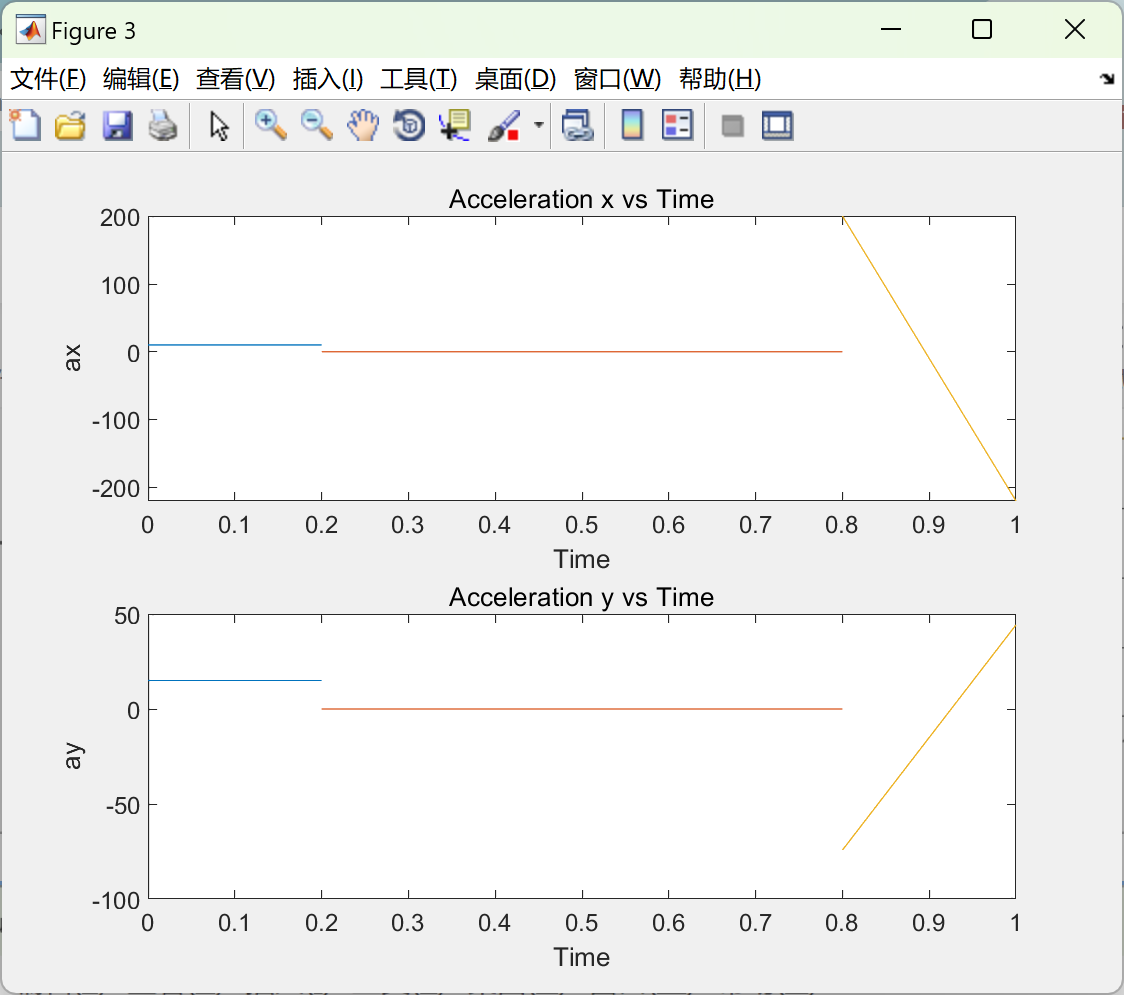
subplot(2,1,1)
plot(t1,ax1,t2,ax2,t3,ax3);
xlabel("Time");
ylabel("ax");
title("Acceleration x vs Time");
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]张国辉,张雅楠,高昂,等.任务-中继无人机协同路径规划模型方法研究[J].空军工程大学学报,2024,25(03):94-102.
[2]卢锦澎,梁宏斌.基于深度Q网络的机器人路径规划研究综述[J].传感器与微系统,2024,43(06):1-5.DOI:10.13873/J.1000-9787(2024)06-0001-05.
🌈4 Matlab代码实现
















 1116
1116

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









