






Dwa方法实现局部路径规划,代码有注解,包含静态障碍物和动态障碍物
ID:2150704813830314
t***1
Dwa方法是一种常用于机器人路径规划的局部路径规划算法。它在实现过程中采用了注解的方式,使得代码更加易读和易于理解。本文将详细介绍Dwa方法在处理静态障碍物和动态障碍物时的具体实现方法,并对其特殊性进行讨论。在介绍完这些内容后,我们将进一步讨论Dwa方法的配套情况和售后服务。
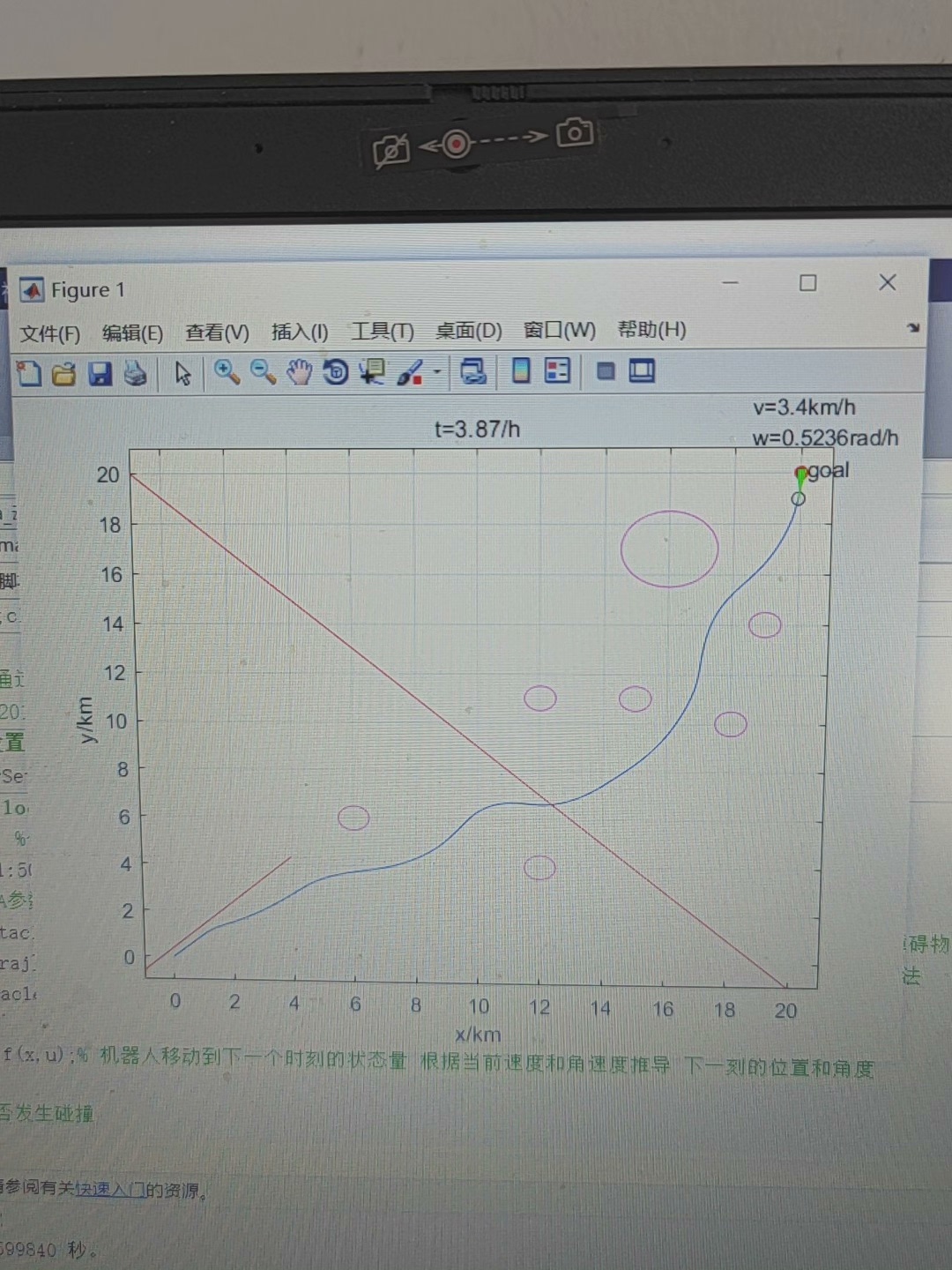
首先,Dwa方法对于静态障碍物的处理非常重要。静态障碍物是指在路径规划的过程中不会发生位置变化的障碍物。在实现Dwa方法时,我们需要将静态障碍物的位置信息作为输入,并根据该信息进行路径规划。对于每个时间步,Dwa方法会考虑机器人的速度和加速度限制,结合静态障碍物的位置,生成一系列候选路径。通过评估候选路径的安全性和可行性,Dwa方法选择最优的路径作为机器人的行进方向。这样,机器人可以避开静态障碍物,实现安全的路径规划。
其次,Dwa方法还可以应对动态障碍物的情况。动态障碍物是指在路径规划的过程中会发生位置变化的障碍物。为了处理动态障碍物,Dwa方法需要实时获取动态障碍物的位置和速度信息,并将其考虑进路径规划的过程中。通过与动态障碍物的状态进行对比和预测,Dwa方法可以及时做出调整,以避免与动态障碍物发生碰撞。这使得机器人在复杂环境中能够稳定和灵活地进行路径规划。
在使用Dwa方法进行路径规划之前,我们建议用户在购买前咨询相关专业人士,以确保其适用性和性能满足实际需求。因为每个应用场景都存在着不同的特殊性,需要根据具体情况进行调整和优化。尽管Dwa方法在大多数情况下表现良好,但仍建议在购买前咨询以了解更多细节和技术细节。
最后,特别强调在购买Dwa方法之前,请用户仔细考虑并确认购买决策,因为一旦售出,不接受退货和换货。这是因为路径规划系统的实施和调试需要耗费大量时间和人力成本,一旦启动,将无法回退。用户购买之前应充分了解Dwa方法的性能和适用性,以确保其符合实际需求。
综上所述,Dwa方法是一种有效的局部路径规划算法,适用于机器人在复杂环境中实现安全和灵活的移动。它通过考虑静态障碍物和动态障碍物的位置和状态信息,生成安全可行的路径。由于每个应用场景的特殊性不同,购买前需进行咨询并确认购买决策。一旦购买,不接受退货和换货。我们致力于提供高质量的产品和服务,以满足用户不同的需求和期望。如有任何疑问,欢迎前来咨询!
以上相关代码,程序地址:http://wekup.cn/704813830314.html















 813
813











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









