






一、经典卡尔曼滤波器
假设我们系统(线性的)的离散状态空间方程如下,其中,ABCD是状态矩阵,w(k)和v(k)分别代表过程噪声和系统噪声,假设过程噪声和测量噪声的房差分别为Q和R。
在这个状态空间方程基础上,我们可以使用经典卡尔曼滤波器进行状态观测。
1、状态预测
带帽子的x表示估计的意思,右上角再加-表示先验估计状态(纯计算)。直观上理解,就是拿上一刻的滤波结果hat_x(k-1)和输入u(k-1),直接套公式,算出一个理论的估算结果。
2、误差协方差预测
引入的过程噪声方差Q,直观上可以理解为,对状态预测结果精度的评价。
3、卡尔曼增益计算
卡尔曼滤波的关键所在,计算权重系统,决定观测值对最终结果的影响程度,Kk的值在0到1之间。
4、状态更新
卡尔曼滤波灵魂所在,直观上理解,如果Kk的值为0,则,表示完全相信套公式计算的结果;如果Kk的值为1,且正常情况下,C元素是1,则
,完全相信测量的结果;当Kk在0~1之间时,则是测量结果与计算结果的融合。
5、误差协方差更新
更新误差协方差矩阵,进入下一轮循环。
至于这五个公式怎么来的,学有余力的同学可以b站学习下总线博士的视频,至于博主嘛,先用了再说,推导是科学家们的事。
DR_CAN的个人空间-DR_CAN个人主页-哔哩哔哩视频 (bilibili.com)
二、实例一:测量室内温度
假设室内温度初始温度是25度。但是由于透风、或者晒太阳,温度会有波动,这个波动叫过程噪声,我们假设过程噪声方差Q=0.01;我们拿温度计测量室内温度,温度计也有精度误差,再加上我们眼花可能也会看错,这个误差我们假设在±0.5℃上波动,测量噪声方差R=0.25;这是一个一维系统,状态空间方程如下:
即:A=1,B=0,C=1,D=0,Q=0.01,R=0.25; 下面开始套参环节:
clc;clear;close all;
% 系统参数
Temp=25; %房间初始温度
dt=0.001;
% 状态空间模型
A=1;
B=0;
C=1;
D=0;
%卡尔曼滤波器初始化
P = 1; % 估计协方差矩阵初始值
Q = 0.01; % 过程噪声协方差矩阵
R = 0.25; % 测量噪声协方差
x_est(1) = 25; % 状态估计初始值
I=eye(length(x_est));
% 模拟数据
t = 0:dt:10;
x_true = zeros(1, length(t)); %存放真实值
z = zeros(size(t)); %存放测量值
% 初始条件
x_true(1) = Temp;
z(1) = C*x_true(:,1) + sqrt(R)*randn;
% 模拟系统和测量
for i = 2:length(t)
% 真实系统更新,计算机模拟系统
x_true(i) = A*x_true(i-1) + sqrt(Q)*randn;
% 生成测量数据
z(i) = C*x_true(i) + sqrt(R)*randn;
% 调用卡尔曼滤波更新
[x_est(i), P] = kalman_filter(x_est(i-1), 0, P, z(i), A, C, Q, R,B);
end
figure
hold on;grid on;box on;
plot(t,z); % 真实位移
plot(t,x_true); % 真实位移
plot(t,x_est); % 滤波后的位移
xlabel('时间 s');
ylabel('位移 m');
title('卡尔曼滤波 位移x')
legend('x mea','x true','x est');
function [x_est, P] = kalman_filter(x_est,u, P, z, A, C, Q, R, B)
% 预测
x_pre = A*x_est + B*u;
P_pre = A*P*A' + Q;
% 更新
K = P_pre*C' / (C*P_pre*C' + R);
x_est = x_pre + K * (z - C*x_pre);
P = (eye(length(x_est)) - K*C) * P_pre;
end运行结果如下:
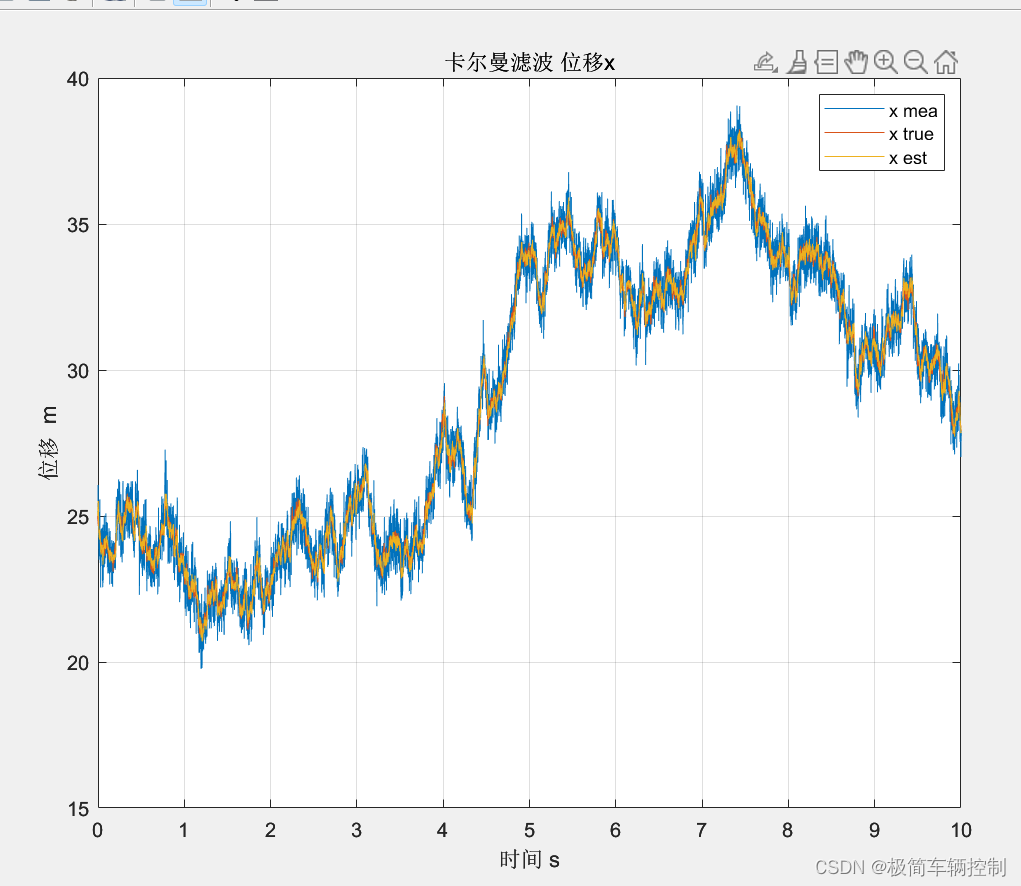
估算的结果与真实结果非常接近。相比测量结果,少了很多噪声。至于温度为什么上升了,跟matlab生成随机数randn函数有关系。
显然,这是在MATLAB脚本里仿真,总感觉跟真实系统相比差点意思?我们把卡尔曼滤波这五个公式搬进simulink模型,并将房间温度模拟当做一个实体plant,如下图所示(也可以用simulink自带的kf模块)。
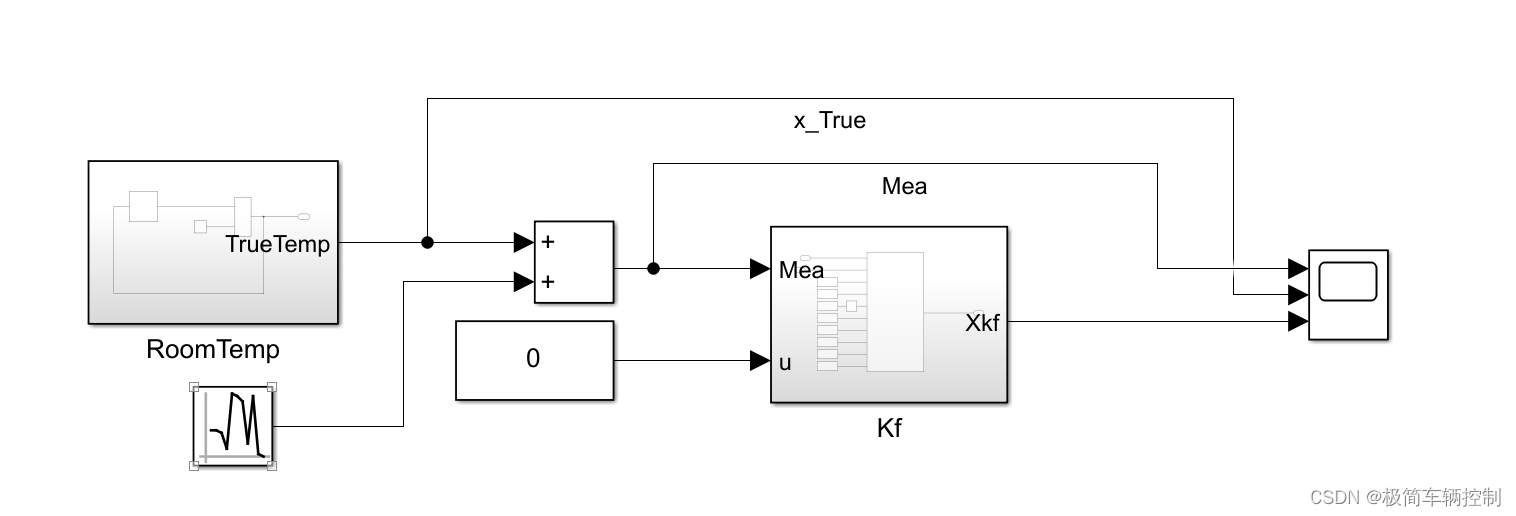
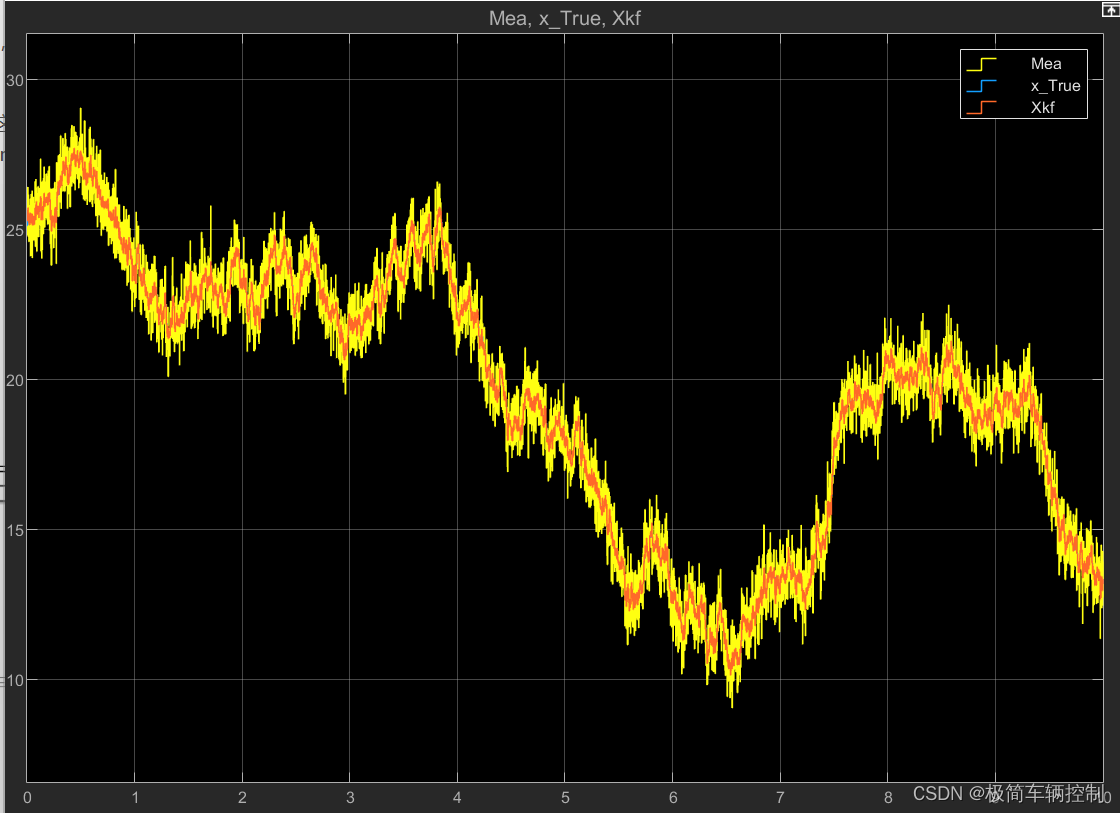
运行结果如下:
三、实例二:自由落体物体实例
假设一个小球从1000m的高空自由落体,忽略空气阻力,只受重力影响。地面有个雷达站,实时观测小球的位置,下面我们建立状态空间方程
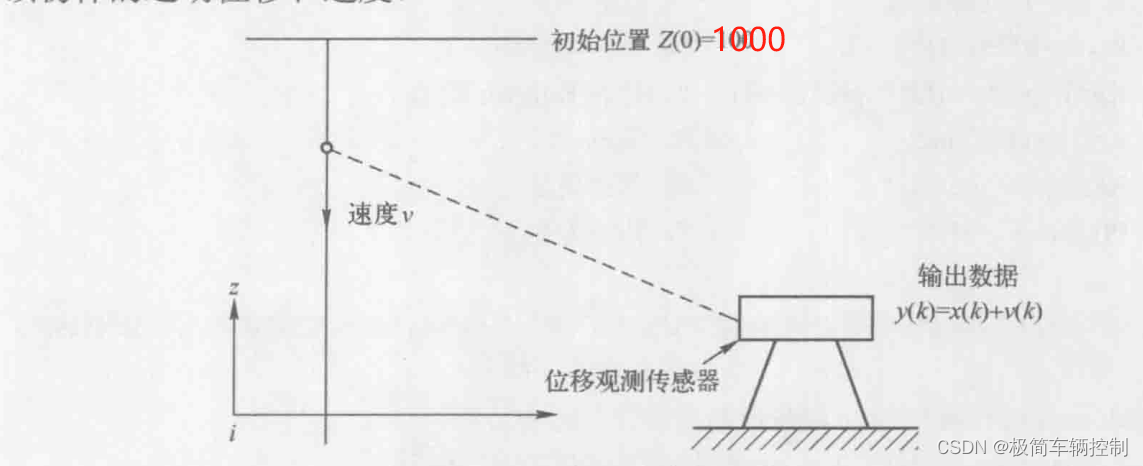
设物体的位移s,物体的速度为v

是假设Q1=Q2=0.01;R=1; 接下来跟上一个实例类似,进入套参数环节。
clc;clear;close all;
% 系统参数
dt=0.001;
InitialHigh=1000;
u=-10;
% 状态空间模型
A=[1 dt;0 1];
B=[0.5*dt*dt;dt];
C=[1 0];
D=0;
%卡尔曼滤波器初始化
P = [1 0;0 1]; % 估计协方差矩阵初始值
Q = [0.01 0;0 0.01]; % 过程噪声协方差矩阵
R = 1; % 测量噪声协方差
x_est(:,1) = [InitialHigh;0];% 状态估计初始值
I=[1 0;0 1];
% 模拟数据
t = 0:dt:10;
x_true = zeros(2, length(t)); %存放真实值
z = zeros(size(t)); %存放测量值
% 初始条件
x_true(:,1) = [InitialHigh;0];
z(1) = C*x_true(:,1) + sqrt(R)*randn;
% 模拟系统和测量
for i = 2:length(t)
% 真实系统更新,计算机模拟系统
x_true(:,i) = A*x_true(:,i-1) + B*u+sqrt(Q)*randn(2,1);
% 生成测量数据
z(i) = C*x_true(:,i) + sqrt(R)*randn;
% 调用卡尔曼滤波更新
[x_est(:,i), P] = kalman_filter(x_est(:,i-1), u, P, z(i), A, C, Q, R,B);
end
figure
hold on;grid on;box on;
plot(t,z); % 真实位移
plot(t,x_true(1,:)); % 真实位移
plot(t,x_est(1,:)); % 滤波后的位移
xlabel('时间 s');
ylabel('高度 m');
title('卡尔曼滤波 高度h')
legend('h mea','h true','h est');
figure
hold on;grid on;box on;
plot(t,x_true(2,:)); % 真实速度
plot(t,x_est(2,:)); % 滤波后的位移
xlabel('时间 s');
ylabel('速度 m/s');
title('卡尔曼滤波 速度v');
legend('v true','v est');
sim KalModel2.slx;
function [x_est, P] = kalman_filter(x_est,u, P, z, A, C, Q, R, B)
% 预测
x_pre = A*x_est + B*u;
P_pre = A*P*A' + Q;
% 更新
K = P_pre*C' / (C*P_pre*C' + R);
x_est = x_pre + K * (z - C*x_pre);
P = (eye(length(x_est)) - K*C) * P_pre;
end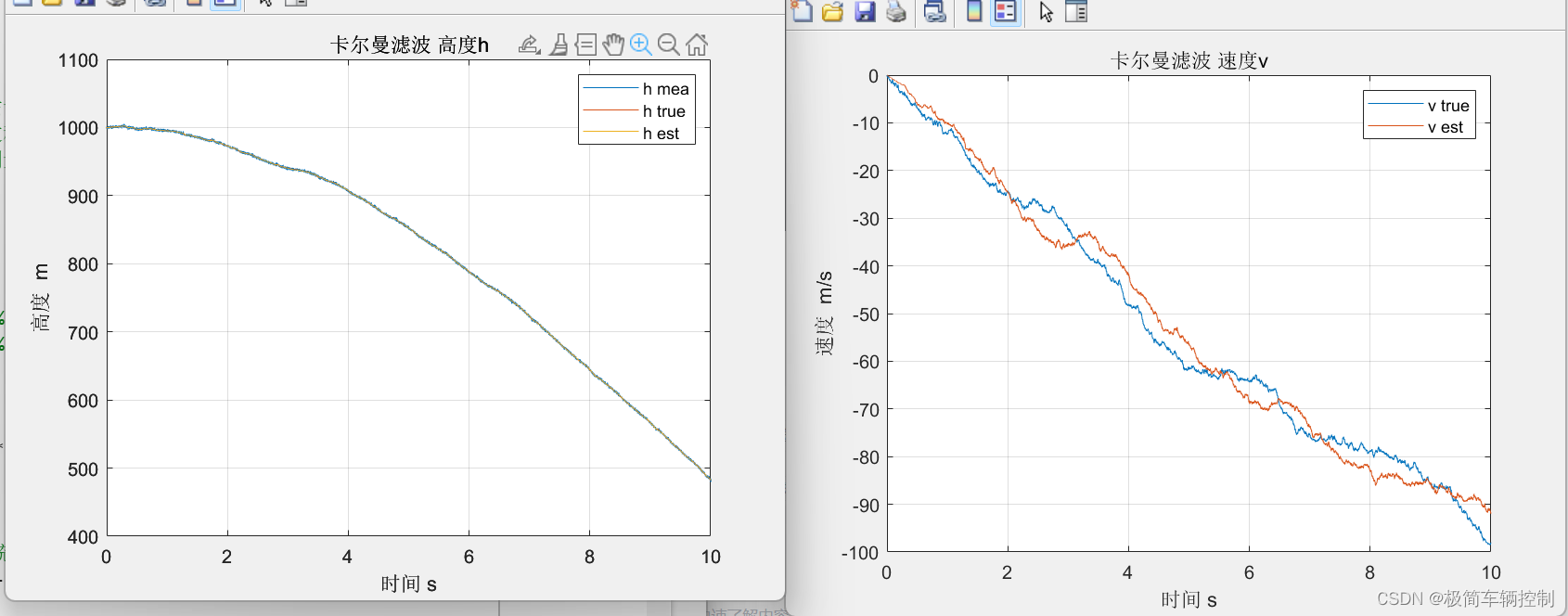
在simulink模型中
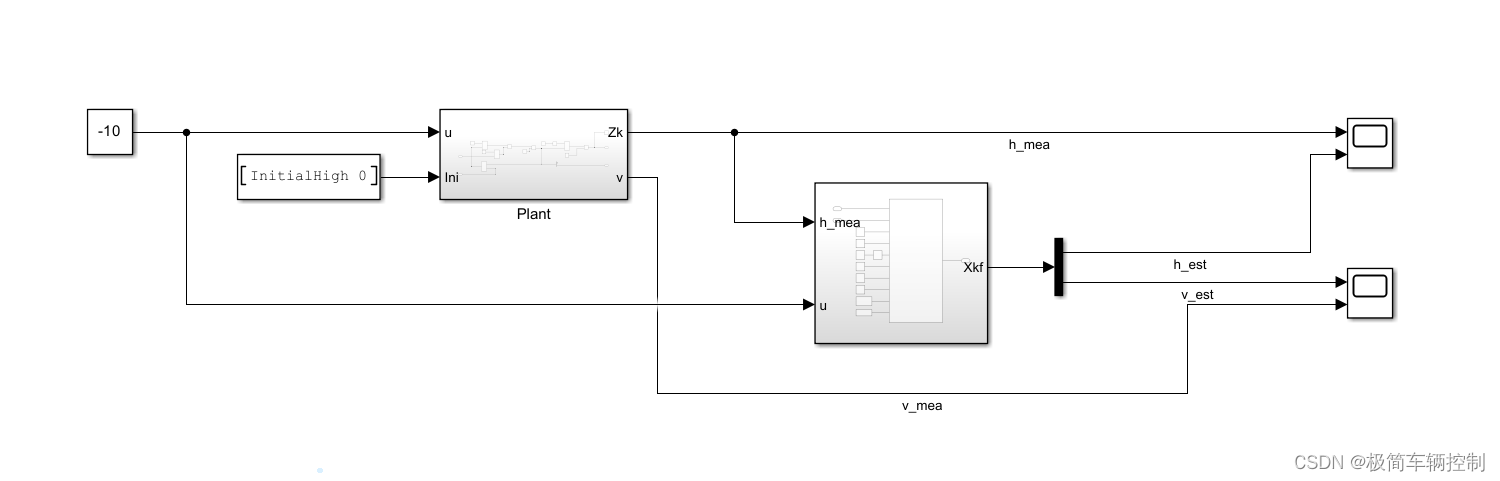
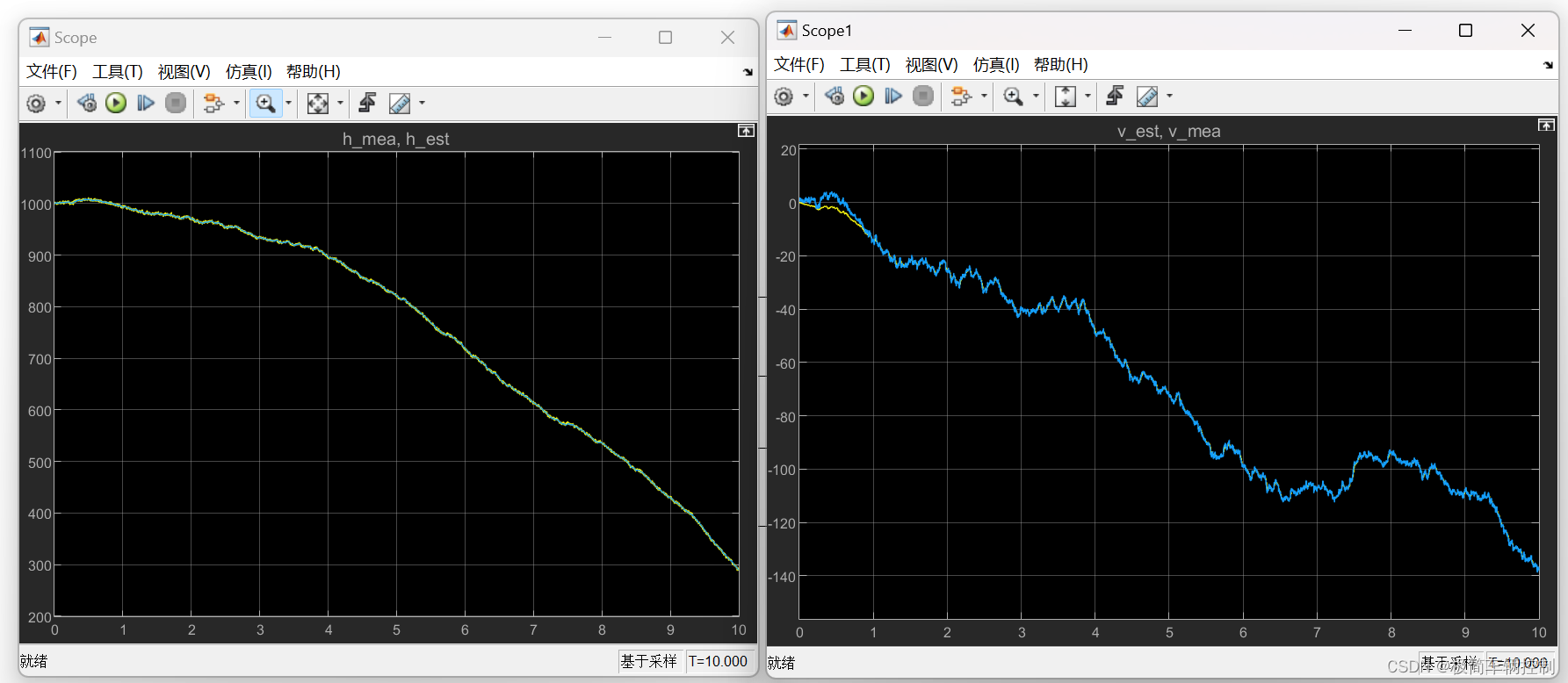
从这个实例中,可以体会到前面文章提到的观测器味道了。测量一个状态量,通过这个状态量和输入,估算另一个状态量。
四、实例三:弹簧-阻尼系统
如下图所示的弹簧阻尼系统,通过牛顿第二定律,建立微分方程,得到连续状态空间方程。
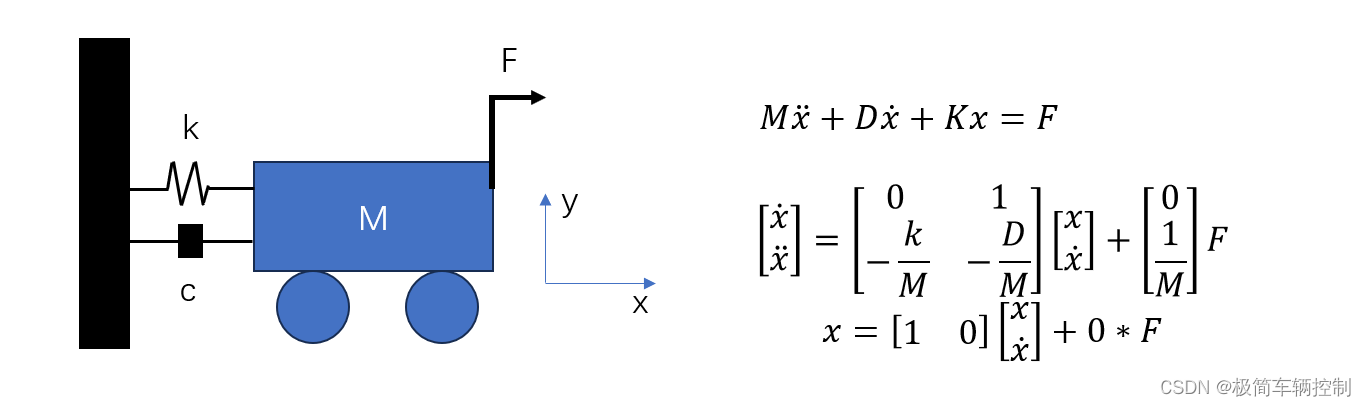
在这个系统中,测量位移x,估计速度v;假设过程噪声Q = 0.01 * eye(2),测量噪声R=1;假设质量M=10; k=150;c=10。与前两个例子不同,在套用卡尔曼滤波器之前,需要将连续系统先离散化。输入力F可以设定输入正弦信号。
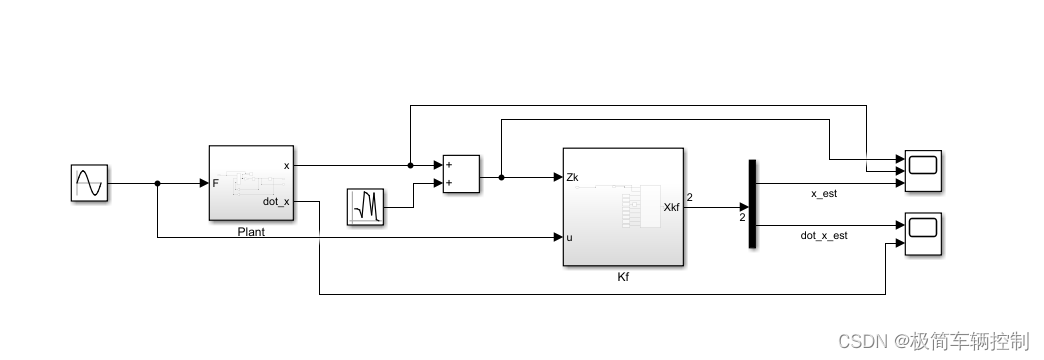
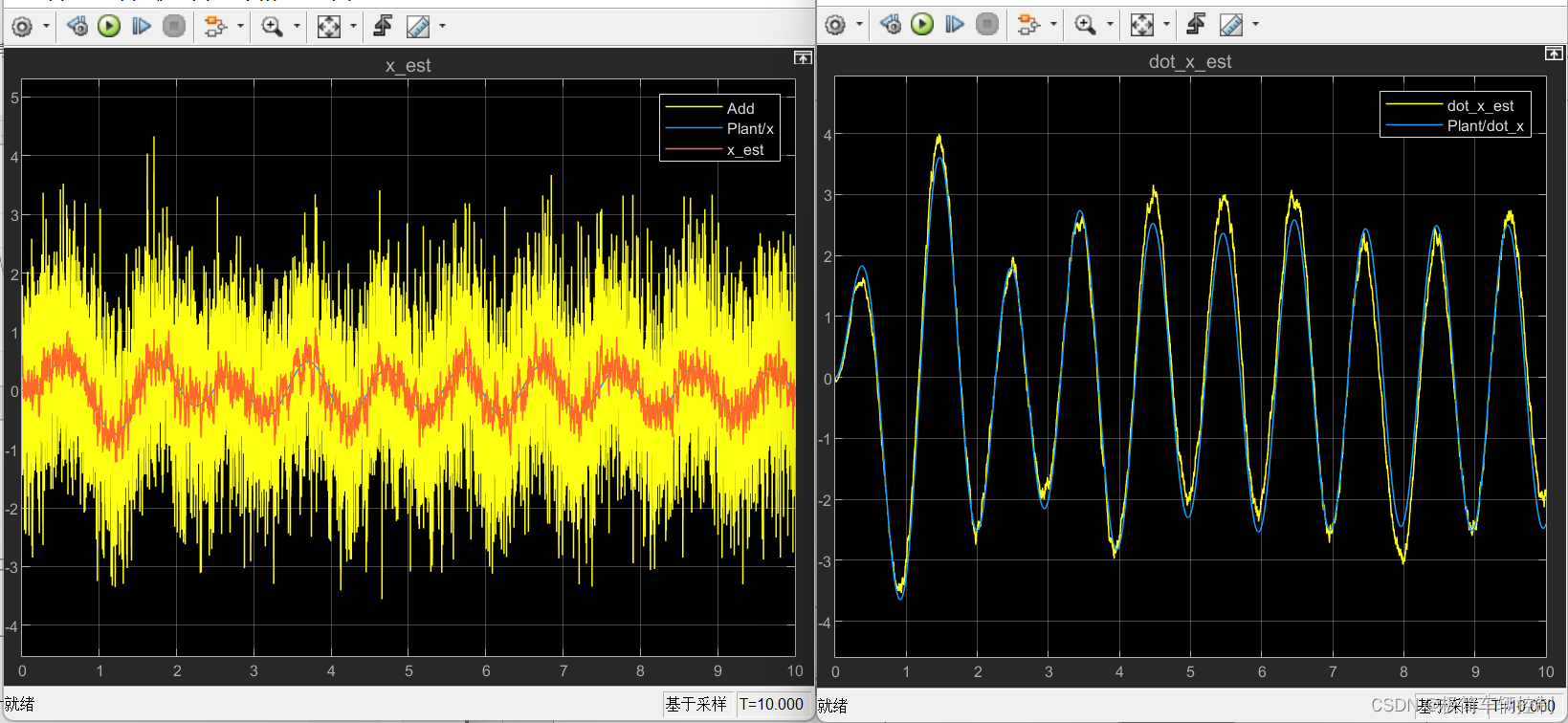
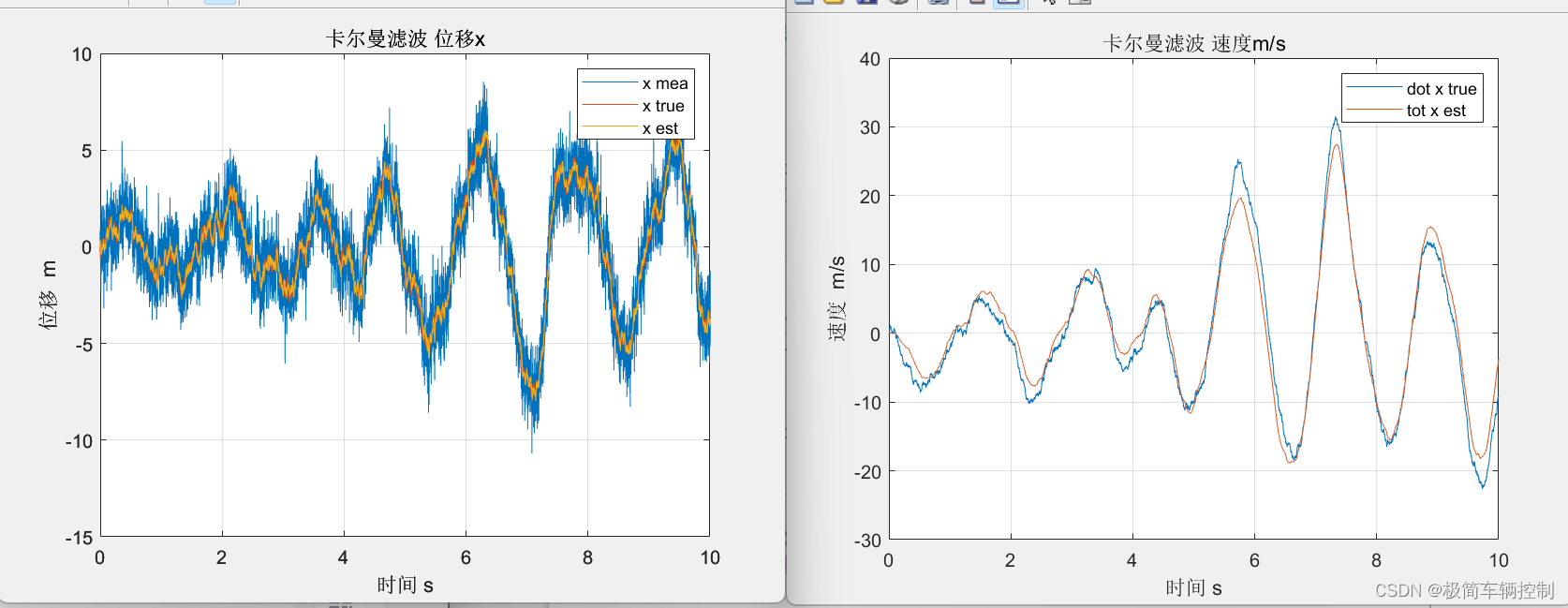 在simulink中,同样套用前两个例子的模型,运行得到结果。
在simulink中,同样套用前两个例子的模型,运行得到结果。
五、关于脚本和模型
关键步骤脚本和模型框架已经贴出,如果需要源模型和代码,还是在某宝店<极简车辆控制>中。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











