






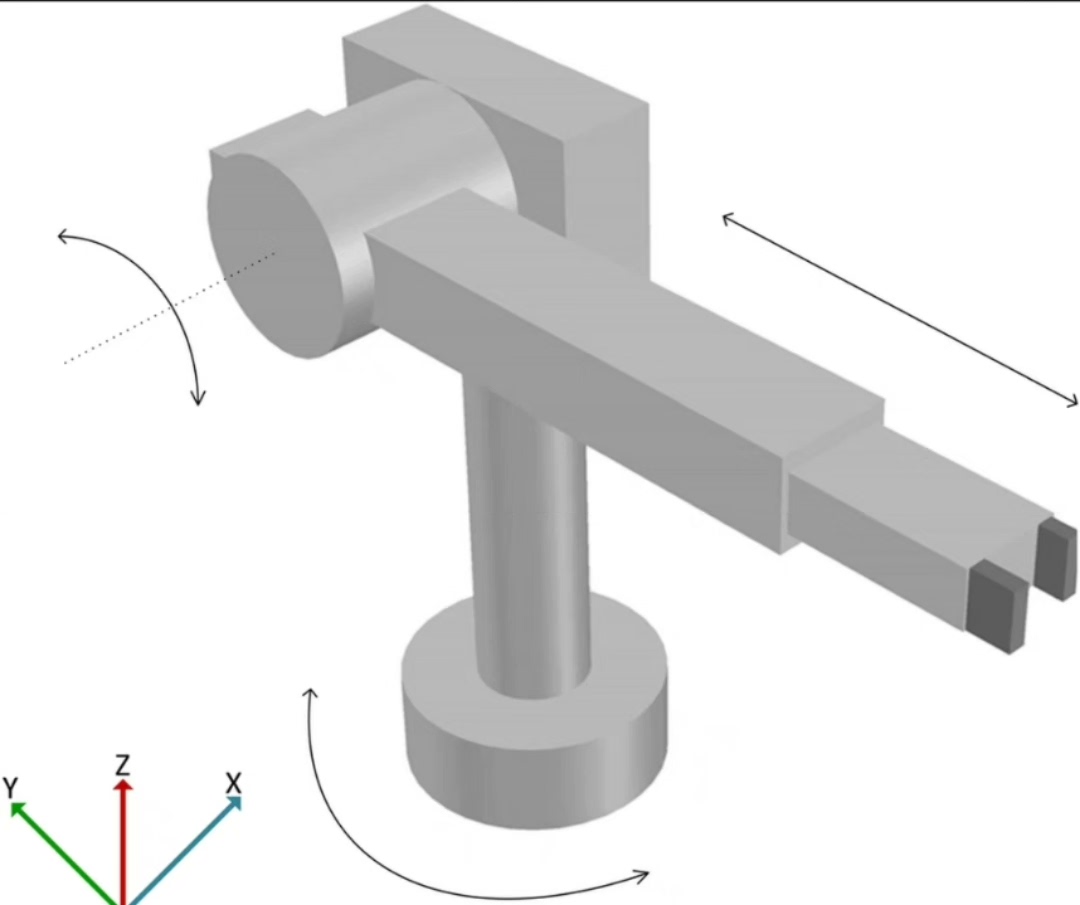
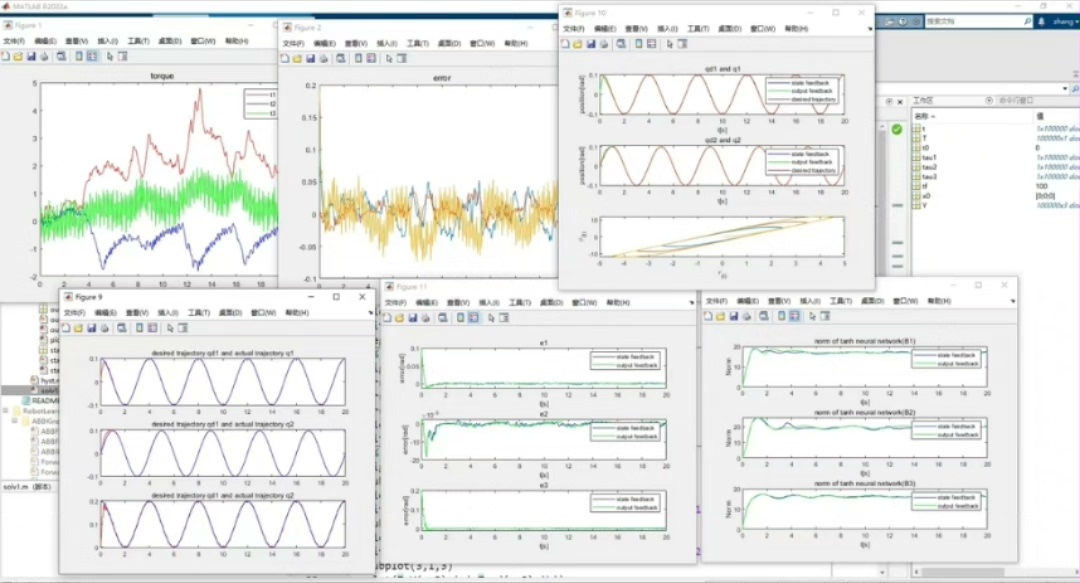
机械臂自适应神经网络控制,机械臂为三自由度,神经网络逼近系统的动力学和滞回非线性。
利用径向基函数的神经网络近似机器人的动力学。
对于系统状态未知的输出反馈,采用高增益观测器估计系统状态。
ID:396764479370958
用户_99290544
机械臂自适应神经网络控制
近年来,机械臂技术在制造业、物流领域等多个领域得到了广泛应用。机械臂的控制系统是其中至关重要的一部分,对于提高机械臂的精度和稳定性具有重要意义。而自适应神经网络控制作为一种新的控制方法,能够有效克服机械臂动力学模型中存在的动态误差和滞回非线性问题,成为研究的热点之一。
本文将围绕机械臂自适应神经网络控制展开讨论。我们所研究的机械臂是一个具有三自由度的系统,并且采用了径向基函数的神经网络来近似机械臂的动力学模型。通过神经网络的学习能力和逼近能力,我们可以准确地描述机械臂在不同状态下的动态响应。
首先,我们需要解决机械臂动力学模型的近似问题。由于机械臂的运动是一个高度非线性的过程,传统的控制方法往往难以精确地描述机械臂的动态特性。因此,我们引入了径向基函数的神经网络,利用神经网络的非线性逼近能力来模拟机械臂的动力学。通过大量的训练数据,神经网络可以学习到机械臂的运动规律,并对机械臂的位置、速度等状态进行准确的预测。
其次,对于系统状态未知的输出反馈问题,我们采用了高增益观测器来估计系统的状态。由于机械臂的状态难以直接测量,我们需要通过观测器来对系统的状态进行估计。高增益观测器通过引入高增益放大器来放大系统的观测误差,从而提高状态估计的精度。通过将观测误差与神经网络的输出进行比较,我们可以得到对机械臂状态的准确估计,从而实现对机械臂的精确控制。
总结起来,本文围绕机械臂自适应神经网络控制展开了研究。通过引入径向基函数的神经网络来近似机械臂的动力学模型,我们可以准确地描述机械臂的运动特性。同时,通过采用高增益观测器对系统状态进行估计,我们可以实现对机械臂的精确控制。这些研究成果对于提高机械臂的精度和稳定性具有重要意义,也为后续的机械臂控制研究提供了新的思路和方法。
在未来的研究中,我们可以进一步探索机械臂自适应神经网络控制的应用领域,如在自动化生产线上的成套装配和分拣作业中的应用等。同时,我们还可以进一步完善神经网络的训练算法,提高控制系统的性能和鲁棒性。我们相信,机械臂自适应神经网络控制技术的不断发展将为智能制造领域带来更多的机遇和挑战。
以上相关代码,程序地址:http://fansik.cn/764479370958.html
















 636
636











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









