







 文章介绍了使用神经网络自适应补偿控制对双关节机械手臂模型的不确定性和扰动进行补偿。通过设计控制律和两种不同的自适应律,进行了仿真分析,结果显示补偿控制能提升指令跟踪效果,其中自适应律②表现更优。但在实际应用中,补偿效果并不理想,提出了关于扰动模型和逼近误差方程的问题。
文章介绍了使用神经网络自适应补偿控制对双关节机械手臂模型的不确定性和扰动进行补偿。通过设计控制律和两种不同的自适应律,进行了仿真分析,结果显示补偿控制能提升指令跟踪效果,其中自适应律②表现更优。但在实际应用中,补偿效果并不理想,提出了关于扰动模型和逼近误差方程的问题。
目录
前言
所谓的补偿可以简单的理解为:将扰动的模型估计出来,对这部分已知的扰动数学模型单独设计控制器进行补偿,本章以神经网络自适应补偿对机械手臂模型的不确定进行补偿控制,为外界扰动和未建模扰动归结为总扰动设计自适应律,从而达到模型的跟踪控制。
1.双关节机械手臂模型
1.1 实际模型
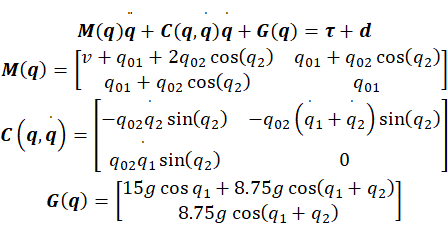
1.2 名义模型
定义名义模型参数为M0(q),C0(q,q')和G0(q),所以有ΔM=M0-M,ΔC=C0-C和ΔG=G0-G,即:
![]()
所以名义机械手臂模型为:
![]()
其中:f=ΔM*q''+ΔC*q'+ΔG+d
2. 控制律设计

3. 神经网络补偿自适应律设计
对于补偿控制可以理解为对扰动f的逼近,之后在所设计的控制律中以估计值f^呈现

其中:
①x=[e;de],如果系统为二阶则x=[e1;e2;de1;de2],以此类推;
②h为高斯函数的输出,所以c和b即为高斯参数;
③y为神经网络的输出,即逼近扰动f的f^;
④w为神经网络的权值,也是自适应律w'的状态,理论上权值数量越多估计越精确
3.1自适应律①
![]()
其中:
①γ为调节逼近的参数
②P为实对称正定矩阵,其求解方法为:
(1)推导出逼近误差状态空间表达式

(2)利用满足误差方程的Lyapunov矩阵,通常选取Q为对角矩阵
![]()
3.2自适应律②
![]()
其中:k>0,其余与自适应律1同。
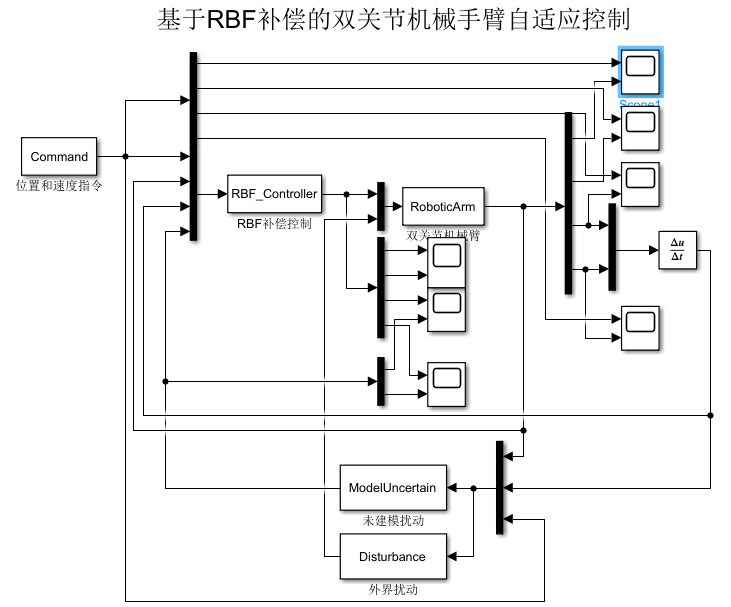
4. 仿真分析
4.1仿真模型
名义模型参数:v=15,q01=10,q02=10
4.2 仿真结果
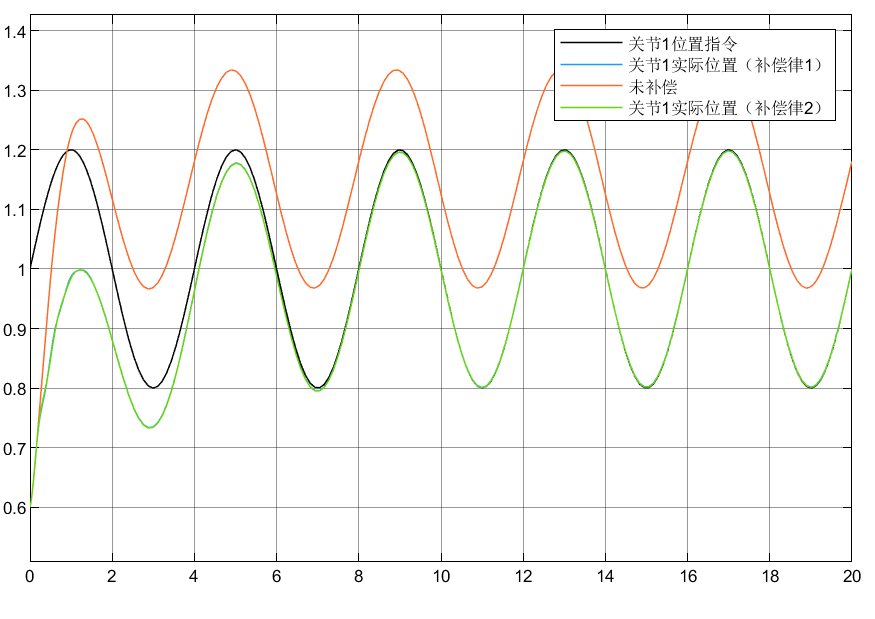
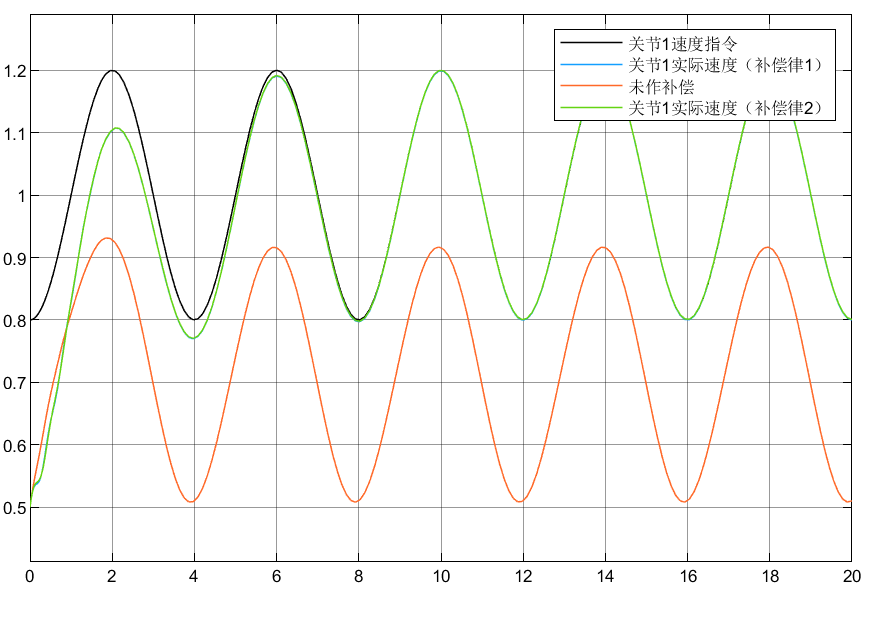
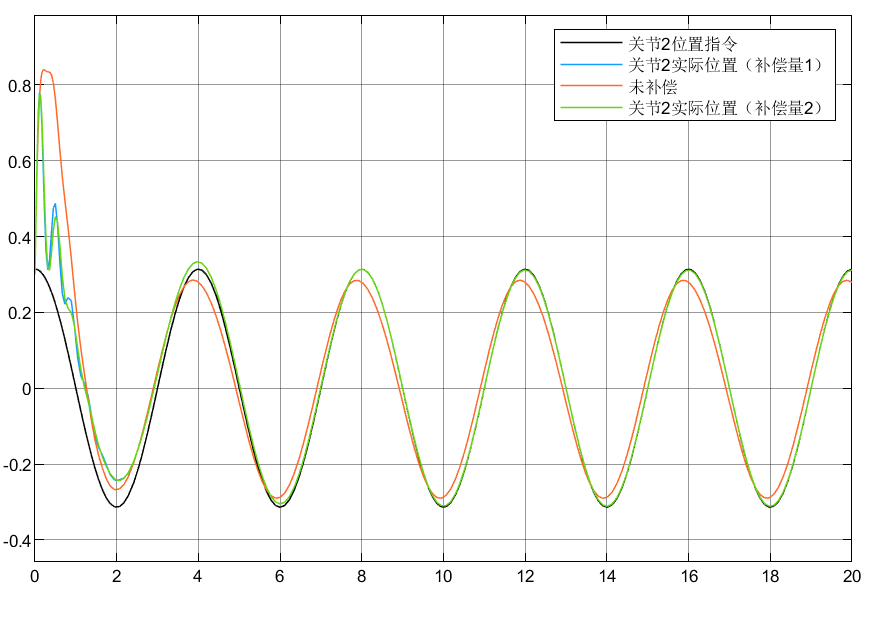
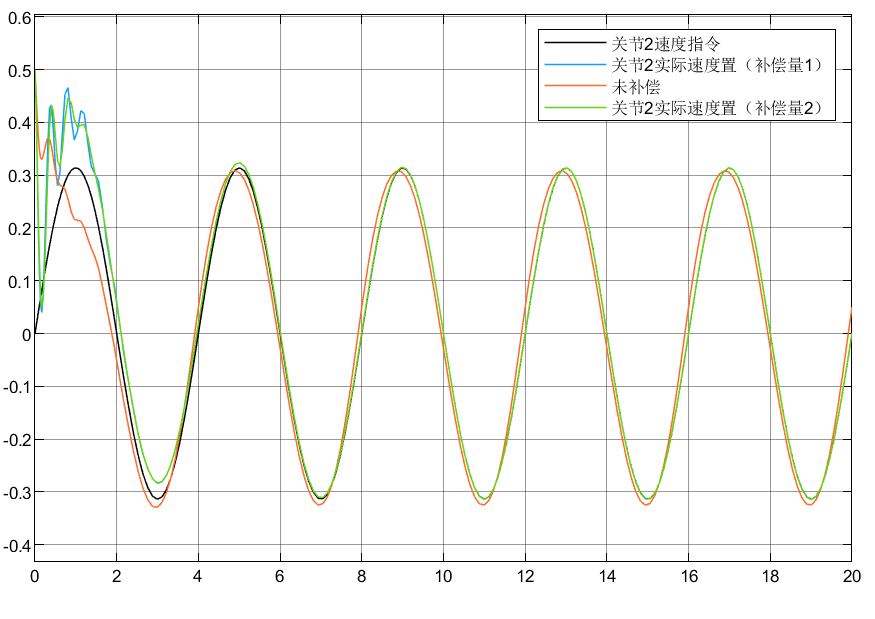
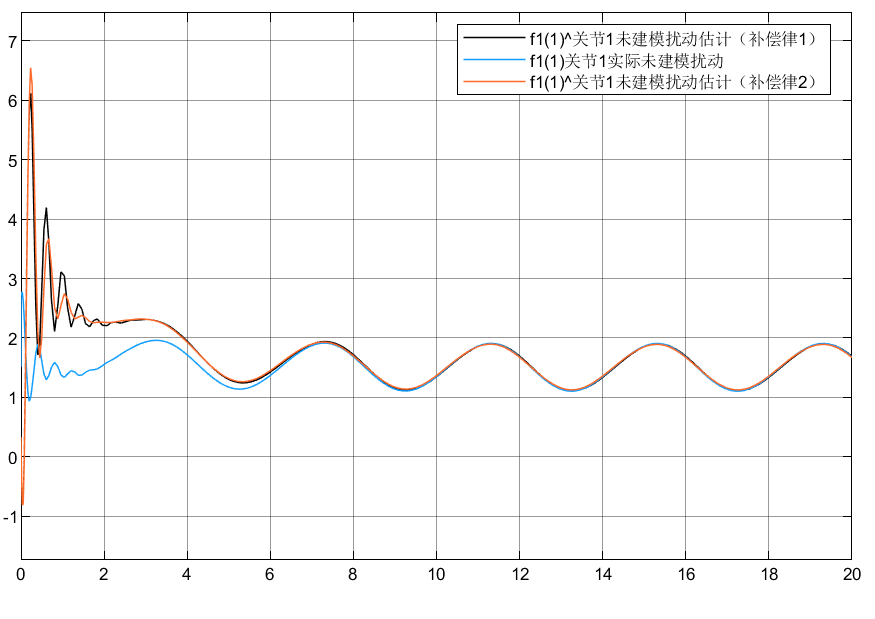
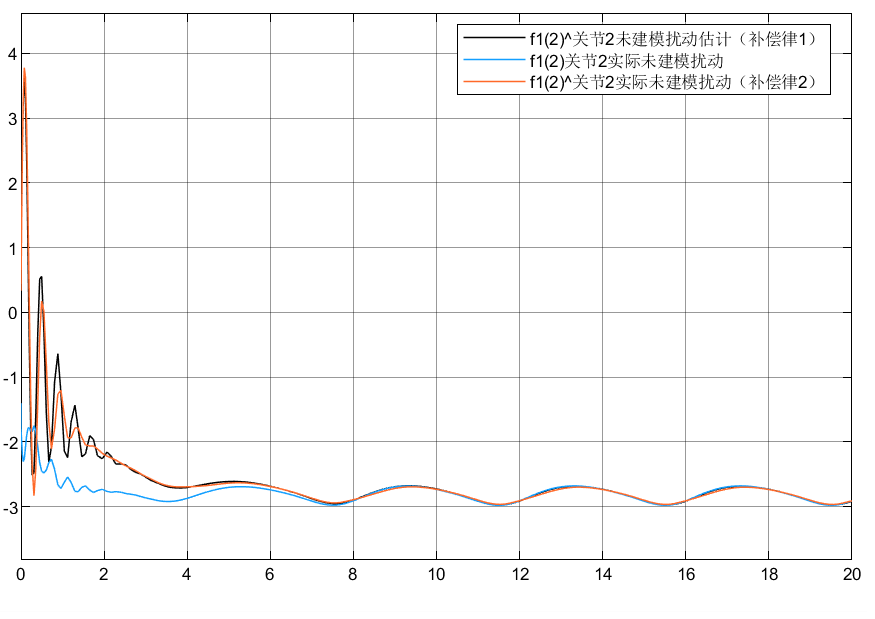
4.3 小结
①可以看到对于含神经网络补偿控制的指令跟踪比未补偿时效果要好
②对于两种自适应律比较可以看到,自适应律②相较补偿更好
5学习问题
①对于补偿的量可以是单独的未建模扰动,也可以是单独的外界扰动,或者是两种的扰动总和,但前提都需要已知名义模型和扰动的数学模型,但是在本例中为什么我在更换的时候却发现补偿不佳呢?
②对于逼近误差方程B矩阵的选取,推导后的B矩阵含M的逆,为什么我这里只能将Inv(M0)替换为eye(2),否则效果不佳?
③对于本例中的f实际上的inv(M0)*f,即f1=inv(M0)*f,但是按推导来应该是直接补偿f,这是为何?有待后续调试考察程序和模型。



















 5855
5855

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











