







1. 基本概念
1)三维重建:就是指从图像出发恢复出空间点三维坐标的过程。
2)三维重建的三个关键步骤:
- 图像对应点的确定
- 摄像机标定
- 2图像间摄像机运动参数的确定
3)摄像机标定:求解摄像机参数的过程,建立摄像机图像像素位置与场景点位置之间的关系,其方法是根据摄像机模型,由已知特征点的图像坐标求解摄像机的模型参数。
2. 图像的形成过程
2.1 坐标系
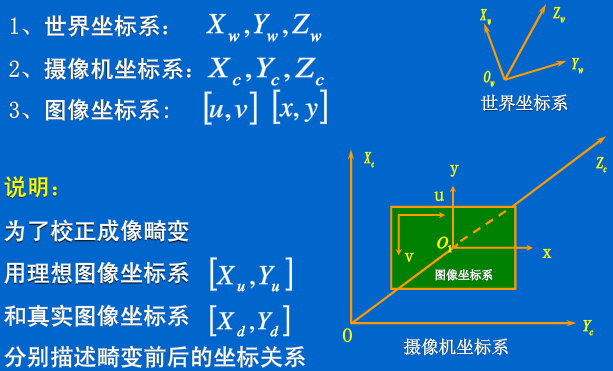
Z=0 考虑径向失真
(Xw,Yw,Zw) ->(Xc,Yc,Zc)------->(x,y)----------------->(x,y)-->(u,v)
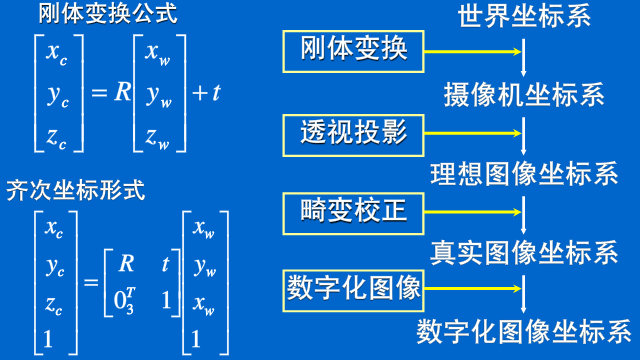
2.2 摄像机光学成像的四个步骤
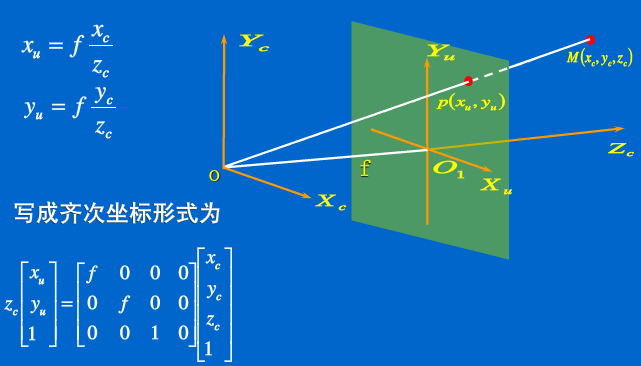
2.3 透视投影
1)透镜成像原理
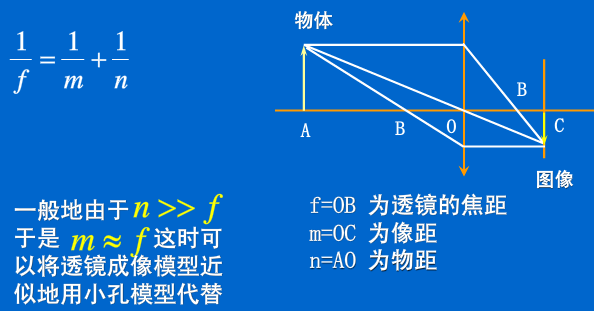
2)小孔成像模型
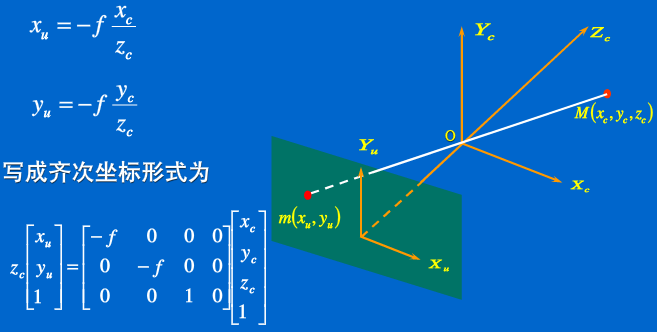
3)中心透视投影模型
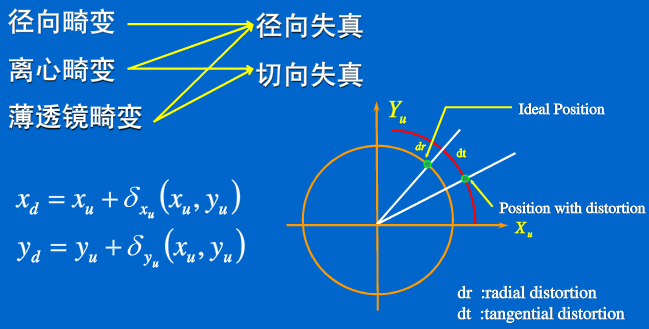
4)畸变校正(径向和切向畸变)
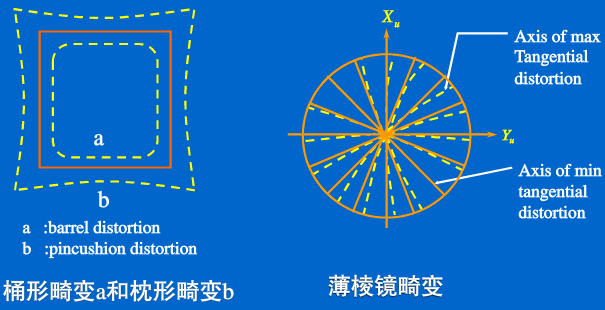
5)畸变校正(其这畸变类型)
2.4 图像数字化
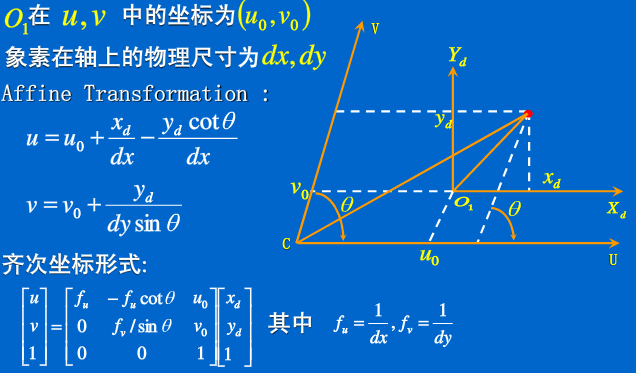
线性摄像机成像模型:

fu,fv,u0,v0只与摄像机内部参数有关,则矩阵k为内部参数矩阵。
其中fu = f/dx ,fv = f/dy ,分别称为u轴和v轴上的归一化焦距;f是相机的焦距,dx和dy分别表示传感器u轴和v轴上单位像素的尺寸大小。
u0和v0则表示的是光学中心,即摄像机光轴与图像平面的交点,通常位于图像中心处,故其值常取分辨率的一半。
现以NiKon D700相机为例进行求解其内参数矩阵:
就算大家身边没有这款相机也无所谓,可以在网上百度一下,很方便的就知道其一些参数:
焦距 f = 35mm
最高分辨率:4256×2832
传感器尺寸:36.0×23.9 mm
根据以上定义可以有:
u0 = 4256/2 = 2128
v0 = 2832/2 = 1416
dx = 36.0/4256
dy = 23.9/2832
fu = f/dx = 4137.8
fv = f/dy = 4147.3
该模型中其他一些参数的含义解释:
为投影深度,其几何意义是目标点P在摄像机坐标系中坐标的Z分量,一般情况下,该值令为1;R,t则构成了摄像机的外参数矩阵,分别称为旋转矩阵和平移矩阵。R是一个3X3的矩阵,t则是一个3X1的矩阵。R可以使用四元素法表示也可以使用欧拉角表示,各有各的好处。摄像机的仿真,可以简单的认为是对内外参数的仿真。只要理解了以上模型中各个量的含义,就可以很容易的模拟一个摄像机。
3. 像素坐标->世界坐标

D(u,v)=Z (即图像中(u,v)位置处的像素点对应的世界坐标系中物体的Z(深度)值)
参考:
1)摄像机标定















 606
606











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









