






 本文介绍了自动驾驶中融合定位的数学基础,特别是李群和李代数在三维旋转和变换中的应用,以及如何利用BCH公式推导出优化模型。通过高斯牛顿法处理相对位姿和先验位姿的残差,构建了融合建图的数学框架。
本文介绍了自动驾驶中融合定位的数学基础,特别是李群和李代数在三维旋转和变换中的应用,以及如何利用BCH公式推导出优化模型。通过高斯牛顿法处理相对位姿和先验位姿的残差,构建了融合建图的数学框架。
自动驾驶融合定位:基于优化的融合方法
一、概述
上一篇文章啰嗦了一大堆,其实是为这一篇文章打了一点基础。本篇文章其实和上一个系列《从零开始做自动驾驶定位》关联比较密切,那个系列讲了如何把各种传感器融合在一起,建立一个完整的可用于定位的点云地图,我们花了大量的篇幅用在实践上,但没有仔细讲它的内部算法原理,所以本篇文章既是这个系列的组成部分,又是对上个系列的理论补充。

附赠自动驾驶学习资料和量产经验:链接
二、融合建图任务解析
为了把本篇文章的任务讲清楚,定好核心方向,我们需要把该算法所引用的场景任务梳理一下。
任务用一句话描述就是融合建图嘛,融合的传感器包括:
1)组合导航系统(输出绝对位姿)
2)雷达里程计(输出相邻帧间相对位姿)
3)回环检测系统(输出再次走到同一场景时,当前帧与历史帧之间的相对位姿)
综合以上各种信息,整个系统的结构图大概应该长这个样子

如果对这些东西做融合的具体实现还不清楚,可以再回头去看一下《从零开始做自动驾驶定位》系列文章中的实现过程。
需要注意的是,图中还有一部分(虚线框中的部分)并没有在上面介绍,是因为跟他相关的融合方法比较复杂,我们把它放在下一篇文章进行单独介绍。
让面的框图部分中的内容,如果用图优化的形式表达成下图中的样子

三、李群、李代数基础知识
想把图优化中的数学部分推导清楚,是需要一定的李群、李代数基础的,还是有必要单独用一个小节把这些基础弄清楚,这样不会妨碍后面流程的流畅性。
1.三维旋转(SO(3))上的李群、李代数

常用的转换包括
2.三维变换(SE(3))上的李群、李代数

常用的转换包括
3.BCH公式
BCH公式在后面的推导中会多次用到,它的完整定义为

其中的中括号代表“李括号”,当A、B为SO(3)时,李括号的含义为

当A、B为SE(3)时,李括号的含义为

其中
因此,SO(3)对应的BCH公式为

其中左乘雅可比为

即

右乘雅可比仅需要在左乘雅可比的基础上对自变量取负号,即
SE(3)对应的BCH公式为

由于SE(3)上的雅可比形式过于复杂,此处直接给出本章所用到的近似形式如下。详细内容可参考《机器人中的状态估计》中公式7.83的推导过程。
若 𝜉1 和 𝜉2 非常小,则左右雅可比均可以直接约等于单位阵,此时有

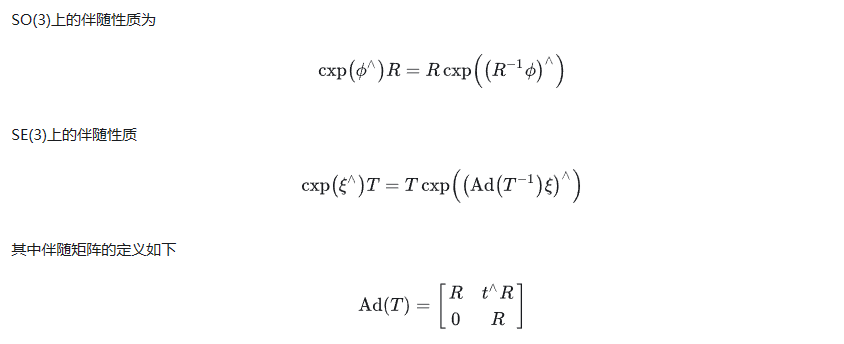
4.伴随性质
四、融合模型推导
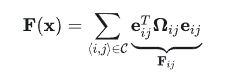
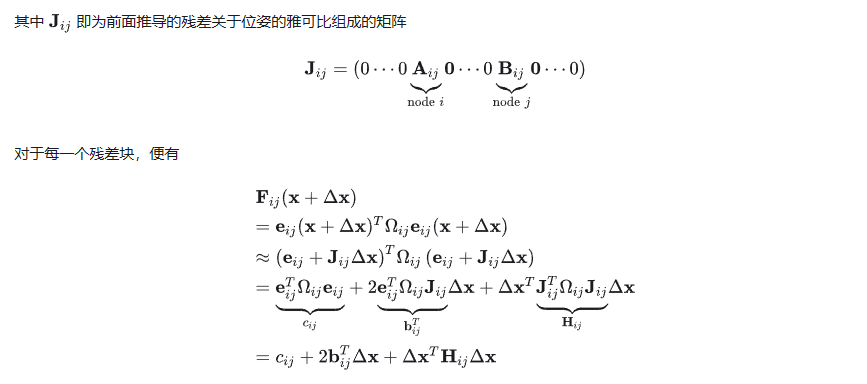
根据上一篇文章的介绍,我们了解到,只要给出残差定义,并给出对应的雅可比,就可以进行优化,得到要求的位姿。而在本篇介绍的这个融合的实际任务中,位姿图优化是把所有的观测和状态放在一起优化,残差项是前面所讲的残差项的总和。在实际使用中,各残差会被分配一个权重,也就是信息矩阵,它相当于对残差进行加权。考虑信息矩阵后,总的残差项可以表示为
此时优化问题可以表示为

单个残差项单个残差项

多个残差项组成位姿图多个残差项组成位姿图
在这个实际任务中,一共有三类信息:相邻帧相对位姿、回环相对位姿、组合导航先验位姿,由于前两个约束的都是两帧之间的相对位姿,即信息形式是完全相同的,因此残差形式及其推导也完全相同(这里组合导航先验位姿是只约束单帧的观测),因此按照种类把残差分成两类来推导。
1.相对位姿优化模型推导
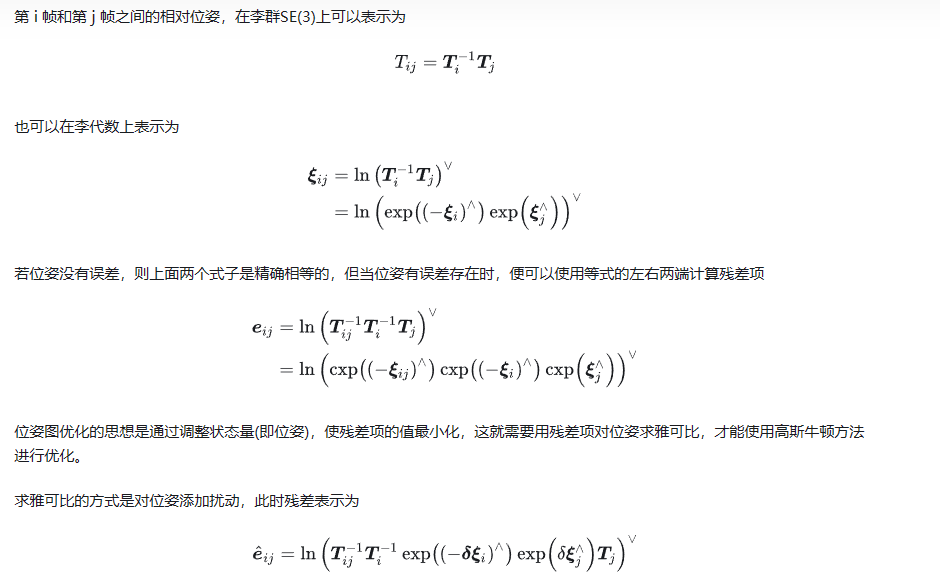
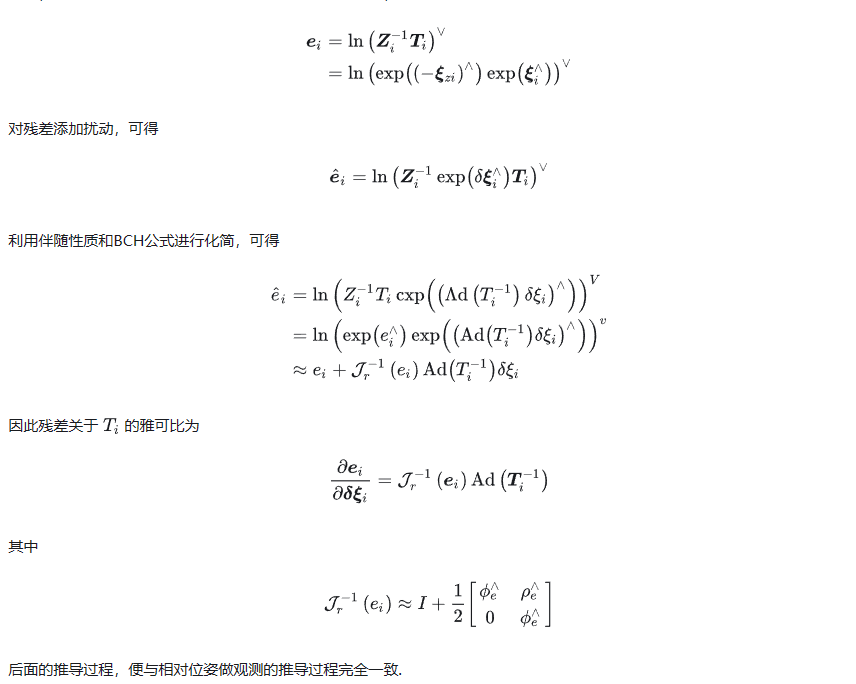
进一步对前面的式子进行化简
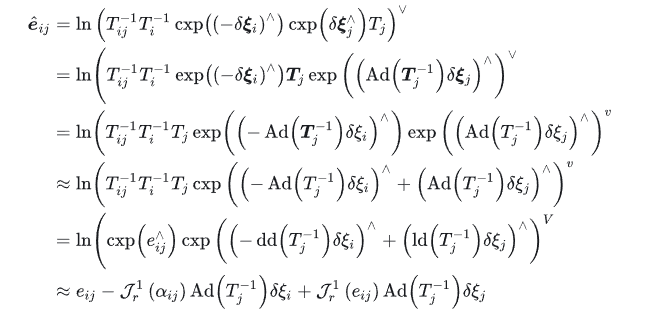
上式的6个等号(包括约等号),可能需要做一些解释(按照等号序号):
1)就是从上面复制下来的,不解释
2)利用了三维变换下的伴随性质
3)利用了三维变换下的伴随性质
4)利用了BCH公式,且是两个李代数都比较小情况下的近似
5)残差的定义
6)利用了三维变化下的伴随性质
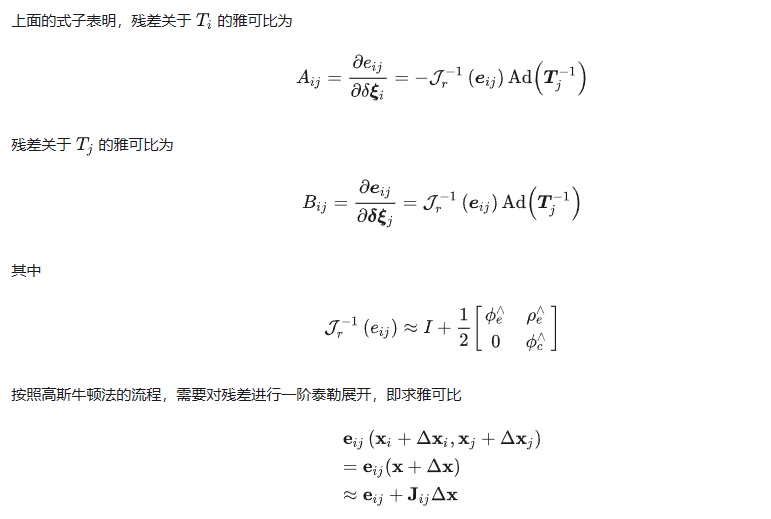
其中
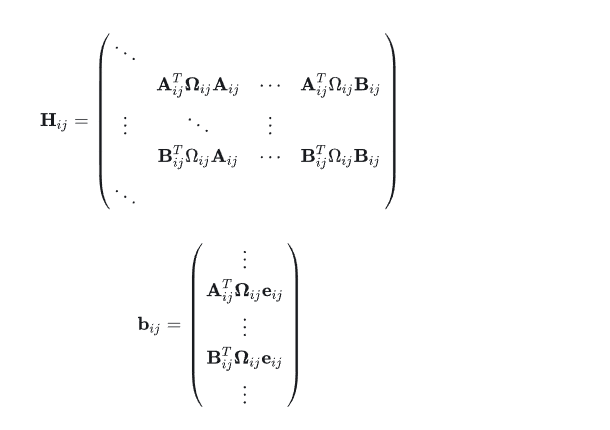
此后便可以使用高斯牛顿法进行优化。
2.先验位姿优化模型推导
先验观测是一元边,它不像前面所述的帧间观测连接两个位姿状态,而是只连接一个位姿状态量,它直接给出的就是该状态量的观测值,因此它对应的残差就是观测值与状态量之间的差异,即
此外,部分场合提供的观测只有位置,没有姿态,比如只有RTK,而没有组合导航,这里的残差便只剩下位置误差。相应的雅可比公式,可自行推导。















 755
755

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









