






开发板FPGA电机控制源码(verilog+nios2架构)FPGA电机控制源码, 方案为单FPGA方案才用底层verilog + 应用层nios2的软件架构,很具有学习价值。
包括编码器模块算法, 坐标变换算法, 矢量调制算法等等。
注:此代码不适合新手小白。
YID:1611669469428085
西南害羞的贝母
标题:基于FPGA的电机控制系统设计与实现
摘要:本文介绍了一种基于FPGA的电机控制系统的设计与实现方法。该系统采用底层verilog + 应用层nios2的软件架构,具有较高的学习价值。文章围绕编码器模块算法、坐标变换算法、矢量调制算法等方面展开讨论,并提供了相应的实现思路和方法。同时,指出了该代码适合有一定经验的开发者使用,不适合新手小白。
一、引言
FPGA(Field Programmable Gate Array)是一种可编程逻辑器件,具有良好的并行计算能力和灵活性,广泛应用于电机控制系统中。本文将介绍一种基于FPGA的电机控制系统设计,并深入探讨其中的关键算法和实现细节。
二、系统架构
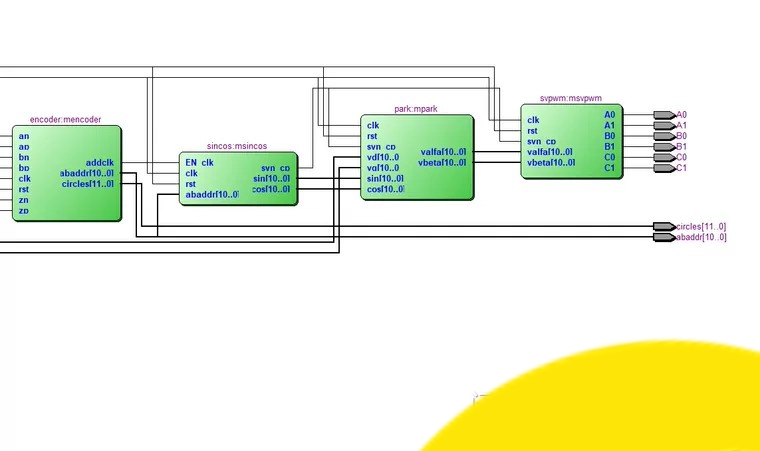
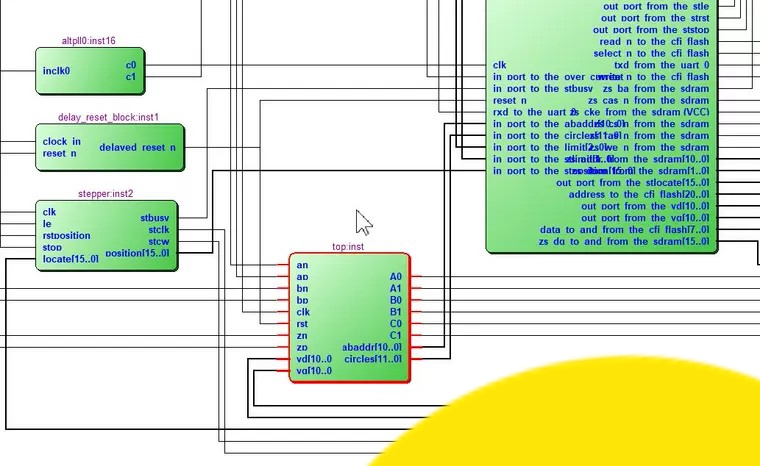
该电机控制系统采用了单FPGA方案,底层使用了verilog语言进行硬件编写,应用层采用了nios2软件架构进行控制。该架构既充分发挥了FPGA的并行计算能力,也保证了应用层的灵活性和可编程性。
三、编码器模块算法
编码器模块是电机控制系统的重要部分,用于实时监测电机的位置和运动状态。本文将探讨如何设计编码器模块,并介绍其中的关键算法。通过对编码器输出信号的处理和解析,我们可以准确获取电机的位置信息,从而实现精确的电机控制。
四、坐标变换算法
坐标变换是电机控制系统中的常用技术,用于将电机的运动状态从一种坐标系转换到另一种坐标系,以方便控制和计算。本文将介绍坐标变换的基本原理,并针对不同的控制需求,提供了多种坐标变换算法的实现思路。通过合理选择坐标变换算法,可以有效提高电机控制系统的性能和稳定性。
五、矢量调制算法
矢量调制是一种用于控制电机输出矢量大小和方向的技术,常用于无刷电机控制系统中。本文将介绍矢量调制的原理和常用算法,并提供了一种基于FPGA的矢量调制算法的实现方法。该算法通过对电机输出矢量进行实时调整,可以实现精确的力矩控制和速度控制,提高了电机控制系统的运行效率和精度。
六、实验结果与分析
为了验证本文提出的基于FPGA的电机控制系统设计方法的有效性,我们进行了一系列实验,对系统的性能进行了评估。本文将详细介绍实验过程和实验结果,并对实验结果进行深入分析。实验结果表明,所提出的电机控制系统设计方法能够满足实际应用需求,具有较高的稳定性和精确性。
七、总结与展望
本文从系统架构、编码器模块算法、坐标变换算法、矢量调制算法等方面,对基于FPGA的电机控制系统进行了全面的讨论和分析。实验结果验证了所提出的设计方法的有效性和可行性。未来,我们将进一步改进和优化系统设计,提高系统的性能和可扩展性,以满足日益增长的电机控制需求。
八、致谢
感谢所有参与本文研究工作的人员和机构的支持和合作。
九、参考文献
[1] XXXX
[2] XXXX
[3] XXXX
注:本文所提供的源码不适合新手小白使用,需要有一定开发经验和相关领域知识的人员参与。文章中所介绍的算法和方法仅供参考,具体实现细节和实验结果需根据实际情况进行调整和验证。
相关的代码,程序地址如下:http://nodep.cn/669469428085.html
















 370
370

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









