







庞特里亚金提出的“极大值原理”(Pontryagin Maximum Principle,PMP)是最优控制理论的三大基石之一。与哈密尔顿函数法的异同是,两者都旨在解决非线性常微分方程组下的最优控制问题,都是性能指标取极值的必要条件。Hamiltonian解决分段连续可导的控制
u
(
t
)
u(t)
u(t),而PMP可以求解不连续可导的控制,特别是不等式约束下的最优控制问题。
极大值原理解决控制受限问题
前面,最优控制理论 二、哈密尔顿函数法已经列举了各种类型的等式约束,采用Hamiltonian求解的方法,如:
- 终端等式约束 ψ ( x ( t f ) , t f ) = 0 \psi(x(t_f),t_f)=0 ψ(x(tf),tf)=0
- 积分方程约束 ∫ 0 t f N ( x ( t ) , u ( t ) , t ) d t = β \int_0^{t_f}N(x(t),u(t),t)\text d t=\beta ∫0tfN(x(t),u(t),t)dt=β
- 控制方程的非线性等式约束 N ( u ( t ) , t ) = 0 N(u(t),t)=0 N(u(t),t)=0
- 状态变量的非线性等式约束 N ( x ( t ) , t ) = 0 N(x(t),t)=0 N(x(t),t)=0
可是常见的不等式约束,Hamiltonian是难以解决的,如
- 控制输入受限 C ( u ( t ) , t ) ≤ 0 C(u(t),t)\leq0 C(u(t),t)≤0
- 状态变量的路径约束 S ( x ( t ) , t ) ≤ 0 S(x(t),t)\leq0 S(x(t),t)≤0,如火箭上升的过载约束
- 终端状态的不等式约束 S ( x ( t f ) , t f ) ≤ 0 S(x(t_f),t_f)\leq0 S(x(tf),tf)≤0,如导弹命中脱靶量要求等
对于这些问题,采用PMP是很有必要的。解决另外两种形式的不等式约束下的OCP问题,在后续章节我会写出来。本篇博客限于篇幅,仅讨论控制输入受限的极大值原理方法,即 C ( u ( t ) , t ) ≤ 0 C(u(t),t)\leq0 C(u(t),t)≤0。
1. 控制 u ( t ) u(t) u(t)受约束的极小值原理
由于PMP的推导过程很复杂,所以这里只给出结论。文献[1]的2.4节应该有证明。
对于控制系统:
x
˙
=
f
[
x
(
t
)
,
u
(
t
)
,
t
]
;
x
(
t
o
)
=
x
0
t
o
≤
t
≤
t
f
min
u
(
t
)
∈
U
J
=
φ
[
x
(
t
f
)
,
t
f
]
+
∫
t
o
t
f
L
[
x
(
t
)
,
u
(
t
)
,
t
]
d
t
\dot{x}=f[x(t), u(t), t] ; \quad x\left(t_{o}\right)=x_0\quad t_{o} \leq t \leq t_{f}\\ \min_{u(t)\in U}J=\varphi\left[x\left(t_{f}\right), t_{f}\right]+\int_{t_{o}}^{t_{f}} L[x(t), u(t), t] d t
x˙=f[x(t),u(t),t];x(to)=x0to≤t≤tfu(t)∈UminJ=φ[x(tf),tf]+∫totfL[x(t),u(t),t]dt
t
f
t_f
tf给定或自由,问题要求受约束的最优控制
u
(
t
)
∈
U
⊂
R
q
u(t)\in U\subset\Reals^q
u(t)∈U⊂Rq,
U
U
U为闭集,(简单理解闭集和开集,举例,闭集是
{
u
∣
∥
u
∥
≤
1
}
\{u|\Vert u\Vert\leq1\}
{u∣∥u∥≤1},开集是
{
u
∣
∥
u
∥
<
1
}
\{u|\Vert u\Vert\lt1\}
{u∣∥u∥<1}。)实际上就是要满足形如下列形式的约束:
C
(
u
(
t
)
,
t
)
≤
0
C(u(t),t)\leq0
C(u(t),t)≤0
对于这个问题,构造Hamilton函数如
H
[
x
(
t
)
,
u
(
t
)
,
λ
(
t
)
,
t
]
≜
L
[
x
(
t
)
,
u
(
t
)
,
t
]
+
λ
T
(
t
)
f
[
x
(
t
)
,
u
(
t
)
,
t
]
H[x(t), u(t), \lambda(t), t]\triangleq L[x(t), u(t), t]+\lambda^{\mathrm T}(t) f[x(t), u(t), t]
H[x(t),u(t),λ(t),t]≜L[x(t),u(t),t]+λT(t)f[x(t),u(t),t]
沿最优轨线的状态方程、协态方程成立,表达为如下形式的Euler-Lagrange方程:
λ
˙
=
−
∂
H
∂
x
(协态方程)
x
˙
=
∂
H
∂
λ
(状态方程)
\begin{aligned} \dot{\lambda}&=-\frac{\partial H}{\partial x} \ &\text{(协态方程)}\\ \dot{x}&=\frac{\partial H}{\partial \lambda} \ &\text{(状态方程)} \end{aligned}
λ˙x˙=−∂x∂H =∂λ∂H (协态方程)(状态方程)
而控制方程有新的形式
H
(
x
∗
(
t
)
,
u
∗
(
t
)
,
λ
∗
(
t
)
,
t
)
=
min
u
∈
U
H
(
x
∗
(
t
)
,
u
(
t
)
,
λ
∗
(
t
)
,
t
)
(PMP)
H(x^*(t),u^*(t),\lambda^*(t),t)=\min_{u\in U}H(x^*(t),u(t),\lambda^*(t),t) \tag{PMP}
H(x∗(t),u∗(t),λ∗(t),t)=u∈UminH(x∗(t),u(t),λ∗(t),t)(PMP)
上式 ( PMP ) (\text{PMP}) (PMP)称为庞特里亚金的极小值原理,该式表明最优控制 u ∗ ( t ) u^*(t) u∗(t)是所有容许的控制 u ( t ) ∈ U u(t)\in U u(t)∈U当中使Hamilton函数取最小值的那个,即 u ∗ ( t ) = { u ∣ min u ( t ) H ( x ∗ , λ ∗ , u , t ) , u ∈ U } u^*(t)=\{u|\min_{u(t)}H(x^*,\lambda^*,u,t),u\in U\} u∗(t)={u∣minu(t)H(x∗,λ∗,u,t),u∈U}。这个控制方程和无约束问题的 ∂ H ∂ u ∗ = 0 \frac{\partial H}{\partial u^*}=0 ∂u∗∂H=0相比而言,将控制的集合推广到分段函数上,不必在整个区间内连续可导;相应地,在求解上需要分段求解 u ∗ ( t ) u^*(t) u∗(t)。
上面协态方程、状态方程、控制方程(PMP)、边界条件等公式,共同组成性能指标取极值的必要条件。
注:若Hamiltonian取
H
[
x
(
t
)
,
u
(
t
)
,
λ
(
t
)
,
t
]
≜
−
L
+
λ
T
f
H[x(t), u(t), \lambda(t), t]\triangleq -L+\lambda^{\mathrm T}f
H[x(t),u(t),λ(t),t]≜−L+λTf
则沿最优控制的必要条件为
H
(
x
∗
(
t
)
,
u
∗
(
t
)
,
λ
∗
(
t
)
,
t
)
=
max
u
∈
U
H
(
x
∗
(
t
)
,
u
(
t
)
,
λ
∗
(
t
)
,
t
)
H(x^*(t),u^*(t),\lambda^*(t),t)=\max_{u\in U}H(x^*(t),u(t),\lambda^*(t),t)
H(x∗(t),u∗(t),λ∗(t),t)=u∈UmaxH(x∗(t),u(t),λ∗(t),t)
这个形式被称为极大值原理,也是庞特里亚金最早提出来的形式。这个方程在求解时和 PMP \text{PMP} PMP等价,但是为了和前面章节的Hamiltonian保持一致,我们用极小值原理。 □ \square □
1.1 边界条件和横截条件
不同问题有不同的边界条件和横截条件,只有考虑全了,常微分方程组和两点边值问题才有可能定解。方程中 x ( t ) , λ ( t ) ∈ R n , u ( t ) ∈ R q x(t),\lambda(t)\in \Reals^n,u(t)\in\Reals^q x(t),λ(t)∈Rn,u(t)∈Rq总共有 2 n + q 2n+q 2n+q个未知的时变参数。协态方程和状态方程 x ( t ) , λ ( t ) x(t),\lambda(t) x(t),λ(t)是一阶常微分方程组,需要知道 2 n 2n 2n个边界条件才能求解;控制方程 u ( t ) u(t) u(t)是代数方程,由 x ( t ) x(t) x(t)和 λ ( t ) \lambda(t) λ(t)分段求解得到。时间自由问题&最小时间问题的终端时刻 t f t_f tf是未知数,需要多加一个边界条件。终端约束问题若有m个等式方程,则在 t f t_f tf时刻多了m个未知的Lagrange乘数 μ ∈ R m \mu\in\Reals^m μ∈Rm.
下面直接把第二章的表格粘贴过来,利用PMP仍然需要套用这些条件,或者说Hamilton函数法和庞特里亚金极小值原理的边界条件、横截条件相同。
| 问题描述 | 未知变量个数(不包含 u ( t ) u(t) u(t)) | 边界条件 | 横截条件 |
|---|---|---|---|
| t f , x f t_f,x_f tf,xf均给定 | 2 n 2n 2n | x ( t 0 ) = x 0 , x ( t f ) = x f x(t_0)=x_0,x(t_f)=x_f x(t0)=x0,x(tf)=xf | \ |
| t f t_f tf给定, x f x_f xf自由 | 2 n 2n 2n | x ( t 0 ) = x 0 x(t_0)=x_0 x(t0)=x0 | λ ( t f ) = ∂ φ ( ⋅ ∗ , t f ) ∂ x \lambda(t_f)=\frac{\partial \varphi(\cdot^*,t_f)}{\partial x} λ(tf)=∂x∂φ(⋅∗,tf) |
| t f t_f tf自由, x f x_f xf给定 | 2 n + 1 2n+1 2n+1 | x ( t 0 ) = x 0 , x ( t f ) = x f x(t_0)=x_0,x(t_f)=x_f x(t0)=x0,x(tf)=xf | H ( ⋅ ∗ , t f ) + ∂ φ ( ⋅ ∗ , t f ) ∂ t = 0 H(\cdot^*,t_f)+\frac{\partial \varphi(\cdot^*,t_f)}{\partial t}=0 H(⋅∗,tf)+∂t∂φ(⋅∗,tf)=0 |
| t f , x f t_f,x_f tf,xf均自由 | 2 n + 1 2n+1 2n+1 | x ( t 0 ) = x 0 x(t_0)=x_0 x(t0)=x0 | λ ( t f ) = ∂ φ ∂ x ; H ( ⋅ ∗ , t f ) + ∂ φ ( ⋅ ∗ , t f ) ∂ t = 0 \lambda(t_f)=\frac{\partial \varphi}{\partial x};\\H(\cdot^*,t_f)+\frac{\partial \varphi(\cdot^*,t_f)}{\partial t}=0 λ(tf)=∂x∂φ;H(⋅∗,tf)+∂t∂φ(⋅∗,tf)=0 |
| t f t_f tf给定, x f x_f xf自由,且有终端约束 ψ ( x f , t f ) = 0 \psi(x_f,t_f)=0 ψ(xf,tf)=0 | 2 n + m 2n+m 2n+m | x ( t 0 ) = x 0 ψ ( x f , t f ) = 0 x(t_0)=x_0\\ \psi(x_f,t_f)=0 x(t0)=x0ψ(xf,tf)=0 | λ ( t f ) = ∂ φ ∂ x + μ T ∂ ψ ∂ x \lambda(t_f)=\frac{\partial \varphi}{\partial x}+\mu^{\mathrm T}\frac{\partial\psi}{\partial x} λ(tf)=∂x∂φ+μT∂x∂ψ |
| t f t_f tf给定, x f x_f xf自由,且有终端约束 ψ ( x f , t f ) = 0 \psi(x_f,t_f)=0 ψ(xf,tf)=0,(Lagrange型性能指标) | 2 n + m 2n+m 2n+m | x ( t 0 ) = x 0 ψ ( x f , t f ) = 0 x(t_0)=x_0\\ \psi(x_f,t_f)=0 x(t0)=x0ψ(xf,tf)=0 | λ ( t f ) = μ T ∂ ψ ∂ x \lambda(t_f)=\mu^{\mathrm T}\frac{\partial\psi}{\partial x} λ(tf)=μT∂x∂ψ |
| t f , x f t_f,x_f tf,xf均自由,且有终端约束 ψ ( x f , t f ) = 0 \psi(x_f,t_f)=0 ψ(xf,tf)=0 | 2 n + m + 1 2n+m+1 2n+m+1 | x ( t 0 ) = x 0 ψ ( x f , t f ) = 0 x(t_0)=x_0\\ \psi(x_f,t_f)=0 x(t0)=x0ψ(xf,tf)=0 | λ ( t f ) = ∂ φ ∂ x + μ T ∂ ψ ∂ x ; ∂ φ ∂ t + μ T ∂ ψ ∂ t + ( ∂ φ ∂ x + μ T ∂ ψ ∂ x ) f + L = 0 , ( t = t f ) \lambda(t_f)=\frac{\partial \varphi}{\partial x}+\mu^{\mathrm T}\frac{\partial\psi}{\partial x};\\ \frac{\partial \varphi}{\partial t}+\mu^{\mathrm T} \frac{\partial \psi}{\partial t}+\left(\frac{\partial \varphi}{\partial x}+\mu^{\mathrm T} \frac{\partial \psi}{\partial x}\right) f+L=0,(t=t_{f}) λ(tf)=∂x∂φ+μT∂x∂ψ;∂t∂φ+μT∂t∂ψ+(∂x∂φ+μT∂x∂ψ)f+L=0,(t=tf) |
| t f , x f t_f,x_f tf,xf均自由,且有终端约束 ψ ( x f , t f ) = 0 \psi(x_f,t_f)=0 ψ(xf,tf)=0,(Lagrange型性能指标) | 2 n + m + 1 2n+m+1 2n+m+1 | x ( t 0 ) = x 0 ψ ( x f , t f ) = 0 x(t_0)=x_0\\ \psi(x_f,t_f)=0 x(t0)=x0ψ(xf,tf)=0 | λ ( t f ) = ∂ φ ∂ x + μ T ∂ ψ ∂ x ; μ T [ ∂ ψ ∂ t + ∂ ψ ∂ x f ] + L = 0 , ( t = t f ) \lambda(t_f)=\frac{\partial \varphi}{\partial x}+\mu^{\mathrm T}\frac{\partial\psi}{\partial x};\\ \mu^{\mathrm T} [\frac{\partial \psi}{\partial t}+ \frac{\partial \psi}{\partial x} f]+L=0,(t=t_{f}) λ(tf)=∂x∂φ+μT∂x∂ψ;μT[∂t∂ψ+∂x∂ψf]+L=0,(t=tf) |
1.2 例1. 一维Riccati方程的PMP推导
对下面这个问题
x
˙
(
t
)
=
x
(
t
)
+
u
(
t
)
,
x
(
0
)
=
x
0
,
0
<
t
<
t
f
min
u
∈
R
J
(
x
,
u
,
t
)
=
∫
0
t
f
x
2
(
t
)
+
u
2
(
t
)
d
t
\dot x(t)=x(t)+u(t),\ x(0)=x_0, \ 0\lt t\lt t_f\\ \min_{u\in\Reals}J(x,u,t)=\int_0^{t_f}x^2(t)+u^2(t)\text dt
x˙(t)=x(t)+u(t), x(0)=x0, 0<t<tfu∈RminJ(x,u,t)=∫0tfx2(t)+u2(t)dt
这个问题不考虑控制约束,即控制在开集
U
∈
R
U\in\Reals
U∈R中且不受约束;
t
f
t_f
tf自由。这个问题可以看做无限时域线性二次型调节器问题的一种一维形式。下面采用极小值原理进行求解
H
(
x
(
t
)
,
λ
(
t
)
,
u
(
t
)
,
t
)
=
x
2
+
u
2
+
λ
(
x
+
u
)
H(x(t),\lambda(t),u(t),t)=x^2+u^2+\lambda(x+u)
H(x(t),λ(t),u(t),t)=x2+u2+λ(x+u)
写出协态方程
λ
′
=
−
∂
H
∂
x
=
−
(
2
x
+
λ
)
\begin{aligned} \lambda'&=-\frac{\partial H}{\partial x}=-(2x+\lambda)\\ \end{aligned}
λ′=−∂x∂H=−(2x+λ)
按照庞特里亚金极大值原理写出控制方程并变形:
H
(
∗
,
u
∗
(
t
)
,
t
)
≤
H
(
∗
,
u
(
t
)
,
t
)
⇒
x
∗
2
+
u
∗
2
+
λ
∗
(
x
∗
+
u
∗
)
≤
x
∗
2
+
u
2
+
λ
∗
(
x
∗
+
u
)
u
∗
2
+
λ
∗
u
∗
≤
u
2
+
λ
∗
+
u
=
g
(
u
)
\begin{aligned} H(*,u^*(t),t)&\leq H(*,u(t),t)\\ \rArr x^{*2}+u^{*2}+\lambda^*(x^*+u^*)&\leq x^{*2}+u^{2}+\lambda^*(x^*+u)\\ u^{*2}+\lambda^*u^*&\leq u^{2}+\lambda^*+u=g(u) \end{aligned}
H(∗,u∗(t),t)⇒x∗2+u∗2+λ∗(x∗+u∗)u∗2+λ∗u∗≤H(∗,u(t),t)≤x∗2+u2+λ∗(x∗+u)≤u2+λ∗+u=g(u)
等式左边小于等于右边的极小值,而右边的极小值,在极值点应有
∂
g
(
u
)
∂
u
=
0
⇒
u
m
i
n
=
−
λ
∗
/
2
\frac{\partial g(u)}{\partial u}=0\rArr u_{min}=-\lambda^*/2
∂u∂g(u)=0⇒umin=−λ∗/2
在无约束情况下,上式就是按照极小值条件求出的最优控制,即
u
∗
(
t
)
=
−
λ
∗
(
t
)
/
2
u^*(t)=-\lambda^*(t)/2
u∗(t)=−λ∗(t)/2. 将最优控制代入状态方程,
{
x
′
=
x
−
λ
/
2
λ
′
=
−
2
x
−
λ
x
(
0
)
=
x
0
,
λ
(
t
f
)
=
0
\left\{\begin{matrix} x'=x-\lambda/2\\ \lambda'=-2x-\lambda\\ x(0)=x_0,\lambda(t_f)=0 \end{matrix}\right.
⎩
⎨
⎧x′=x−λ/2λ′=−2x−λx(0)=x0,λ(tf)=0
求解这个两点边值问题即可得到结果。如果进一步假设控制是反馈控制,即
u
(
t
)
=
−
k
(
t
)
x
(
t
)
u(t)=-k(t)x(t)
u(t)=−k(t)x(t)
再考虑控制方程,并且定义一个变量
s
(
t
)
s(t)
s(t)
λ
(
t
)
=
2
k
(
t
)
x
(
t
)
≡
s
(
t
)
x
(
t
)
⇒
s
(
t
)
=
λ
(
t
)
x
(
t
)
\lambda(t)=2k(t)x(t)\equiv s(t)x(t)\rArr s(t)=\frac{\lambda(t)}{x(t)}
λ(t)=2k(t)x(t)≡s(t)x(t)⇒s(t)=x(t)λ(t)
为了获得 s ( t ) s(t) s(t)对时间的微分方程以便求解它,把 s ( t ) s(t) s(t)对时间求全导数 s ′ = λ ′ x − λ x ′ x 2 s'=\frac{\lambda'}x-\frac{\lambda x'}{x^2} s′=xλ′−x2λx′然后代入协态方程 λ ′ = − 2 x − λ \lambda'=-2x-\lambda λ′=−2x−λ和状态方程 x ′ = x − λ / 2 x'=x-\lambda/2 x′=x−λ/2得到: − s ′ = 2 + 2 s − s 2 2 , s ( t f ) = λ ( t f ) / x = 0 -s'=2+2s-\frac{s^2}2,s(t_f)=\lambda(t_f)/x=0 −s′=2+2s−2s2,s(tf)=λ(tf)/x=0
上式就是Riccati方程,高等数学中有求解初值问题
s
(
t
)
s(t)
s(t)的方法。它的矩阵形式为
−
S
˙
(
t
)
=
A
T
S
+
S
A
−
S
B
R
−
1
B
T
S
+
Q
,
S
(
t
f
)
=
S
f
-\dot{S}(t)=A^{\mathrm T} S+S A-S B R^{-1} B^{\mathrm T} S+Q, \quad S(t_f)=S_f
−S˙(t)=ATS+SA−SBR−1BTS+Q,S(tf)=Sf
事实上,利用PMP不仅可以解决控制受限的最优控制问题,而且也可以解决控制不受约束的问题,此时按照PMP推导出的结果和Hamilton函数方法的控制方程是完全等价的。
2. 最短时间控制问题
2.1 问题描述
设最短时间、终端约束的最优控制问题如下
x
˙
(
t
)
=
f
(
x
(
t
)
,
t
)
+
B
(
x
(
t
)
,
t
)
u
(
t
)
u
∈
R
q
,
∣
u
j
(
t
)
∣
<
1
,
j
=
1
,
2
,
⋯
,
q
x
(
t
0
)
=
x
0
,
ψ
(
x
(
t
f
)
,
t
f
)
=
0
,
ψ
∈
R
m
min
u
(
t
)
J
=
t
f
\dot x(t)=f(x(t),t)+B(x(t),t)u(t)\\ u\in\Reals^q,|u_j(t)|<1,j=1,2,\cdots,q\\ x(t_0)=x_0,\psi(x(t_f),t_f)=0,\psi\in\Reals^m\\ \min_{u(t)}J=t_f
x˙(t)=f(x(t),t)+B(x(t),t)u(t)u∈Rq,∣uj(t)∣<1,j=1,2,⋯,qx(t0)=x0,ψ(x(tf),tf)=0,ψ∈Rmu(t)minJ=tf
此问题的性能指标仅由一个到达时刻
t
f
t_f
tf构成。写出Hamilton函数
H
=
1
+
λ
T
(
f
+
B
u
)
=
1
+
λ
T
f
+
u
T
(
B
T
λ
)
=
1
+
λ
T
f
+
∑
j
=
1
q
u
j
(
λ
T
B
(
:
,
j
)
)
\begin{aligned} H&=1+\lambda^\mathrm T(f+Bu) =1+\lambda^\mathrm Tf+u^\mathrm T(B^\mathrm T\lambda)\\ &=1+\lambda^\mathrm Tf+\sum_{j=1}^qu_j(\lambda^\mathrm T B(:,j)) \end{aligned}
H=1+λT(f+Bu)=1+λTf+uT(BTλ)=1+λTf+j=1∑quj(λTB(:,j))
其中
B
(
:
,
j
)
B(:,j)
B(:,j)代表矩阵
B
B
B的第
j
j
j列所有元素,
λ
T
B
(
:
,
j
)
=
(
n
∗
1
)
T
⋅
(
n
∗
1
)
∈
R
\lambda^\mathrm T B(:,j)=(n*1)^\mathrm T\cdot(n*1)\in\Reals
λTB(:,j)=(n∗1)T⋅(n∗1)∈R。这个系统的协态方程
λ
˙
=
−
∂
H
∂
x
=
−
∂
f
T
∂
x
λ
−
∑
j
=
1
q
u
j
(
∂
B
(
:
,
j
)
T
∂
x
λ
)
=
−
[
∂
f
T
∂
x
+
∑
j
=
1
q
u
j
(
∂
B
(
:
,
j
)
T
∂
x
)
]
λ
\dot\lambda=-\frac{\partial H}{\partial x}= -\frac{\partial f^\mathrm T}{\partial x}\lambda-\sum_{j=1}^qu_j(\frac{\partial B(:,j)^\mathrm T}{\partial x}\lambda)\\=-[\frac{\partial f^\mathrm T}{\partial x}+\sum_{j=1}^qu_j(\frac{\partial B(:,j)^\mathrm T}{\partial x})]\lambda
λ˙=−∂x∂H=−∂x∂fTλ−j=1∑quj(∂x∂B(:,j)Tλ)=−[∂x∂fT+j=1∑quj(∂x∂B(:,j)T)]λ
下面考察极小值原理,则对每个
u
j
,
j
=
1
,
2
,
⋯
,
q
u_j, j=1,2,\cdots,q
uj,j=1,2,⋯,q,它的开关函数如下
u
j
∗
=
{
−
1
,
λ
T
B
(
:
,
j
)
>
0
1
,
λ
T
B
(
:
,
j
)
<
0
o
t
h
e
r
s
,
λ
T
B
(
:
,
j
)
=
0
u_j^*=\left\{\begin{matrix} -1,&\lambda^\mathrm T B(:,j)>0\\ 1,&\lambda^\mathrm T B(:,j)<0\\ others,&\lambda^\mathrm T B(:,j)=0 \end{matrix}\right.
uj∗=⎩
⎨
⎧−1,1,others,λTB(:,j)>0λTB(:,j)<0λTB(:,j)=0
需要注意的是,最小时间控制问题,若开关函数对
∀
t
∈
[
0
,
t
f
]
,
λ
T
B
(
:
,
j
)
≠
0
\forall t\in[0,t_f],\lambda^\mathrm T B(:,j)\neq0
∀t∈[0,tf],λTB(:,j)=0. 那么上面的第三项
others
\text{others}
others就没有了,用正负号符号函数
sign
\text{sign}
sign来表示这种形式的式子
u
j
∗
=
−
sign
{
λ
T
B
(
:
,
j
)
}
u_j^*=-\text{sign}\{\lambda^\mathrm T B(:,j)\}
uj∗=−sign{λTB(:,j)}
这种形式的控制要么是最大值,要么是最小值,称为Bang-Bang控制。可证明在最大与最小之间的切换次数是有限的。
2.2 例2. 二次积分时间最优控制
对于二次积分系统,若初始和终端条件给定,控制幅值受限,最小到达时间。问题如下
x
˙
1
(
t
)
=
x
2
(
t
)
,
x
˙
2
(
t
)
=
u
(
t
)
x
(
0
)
=
[
x
1
,
x
2
]
,
x
(
t
f
)
=
[
0
,
0
]
min
∣
u
(
t
)
∣
≤
1
J
=
∫
0
t
f
1
d
t
=
t
f
\dot x_1(t)=x_2(t),\dot x_2(t)=u(t)\\ \mathbf x(0)=[x_1,x_2],\mathbf x(t_f)=[0,0]\\ \min_{|u(t)|\leq 1}J=\int_0^{t_f}1\text dt=t_f
x˙1(t)=x2(t),x˙2(t)=u(t)x(0)=[x1,x2],x(tf)=[0,0]∣u(t)∣≤1minJ=∫0tf1dt=tf
这个问题可以看做最小时间控制问题的一维形式。首先构建Hamilton函数
H
(
x
(
t
)
,
λ
(
t
)
,
u
(
t
)
,
t
)
=
1
+
λ
1
x
2
+
λ
2
u
H(x(t),\lambda(t),u(t),t)=1+\lambda_1x_2+\lambda_2u
H(x(t),λ(t),u(t),t)=1+λ1x2+λ2u
由极小值原理






3. 燃料最优控制
3.1 最小燃料消耗问题
设最小燃料消耗问题如下
x
˙
(
t
)
=
f
(
x
(
t
)
,
t
)
+
B
(
x
(
t
)
,
t
)
u
(
t
)
u
∈
R
q
,
∣
u
j
(
t
)
∣
<
1
,
j
=
1
,
2
,
⋯
,
q
x
(
t
0
)
=
x
0
,
ψ
(
x
(
t
f
)
,
t
f
)
=
0
,
ψ
∈
R
m
min
u
(
t
)
J
=
∫
0
t
f
∑
j
=
1
q
w
j
∣
u
j
(
t
)
∣
d
t
\dot x(t)=f(x(t),t)+B(x(t),t)u(t)\\ u\in\Reals^q,|u_j(t)|<1,j=1,2,\cdots,q\\ x(t_0)=x_0,\psi(x(t_f),t_f)=0,\psi\in\Reals^m\\ \min_{u(t)}J=\int_0^{t_f}\sum_{j=1}^qw_j|u_j(t)|\text dt
x˙(t)=f(x(t),t)+B(x(t),t)u(t)u∈Rq,∣uj(t)∣<1,j=1,2,⋯,qx(t0)=x0,ψ(x(tf),tf)=0,ψ∈Rmu(t)minJ=∫0tfj=1∑qwj∣uj(t)∣dt
此问题的性能指标当中,各个控制分量的权重
w
i
>
0
w_i>0
wi>0为常数;终端时刻
t
f
t_f
tf自由或固定。写出Hamilton函数
H
=
∑
j
=
1
q
w
j
∣
u
j
(
t
)
∣
+
λ
T
(
f
+
B
u
)
=
λ
T
f
+
∑
j
=
1
q
w
j
∣
u
j
(
t
)
∣
+
u
j
[
λ
T
B
(
:
,
j
)
]
\begin{aligned} H&=\sum_{j=1}^qw_j|u_j(t)|+\lambda^\mathrm T(f+Bu)\\ &=\lambda^\mathrm Tf+\sum_{j=1}^qw_j|u_j(t)|+u_j[\lambda^\mathrm T B(:,j)] \end{aligned}
H=j=1∑qwj∣uj(t)∣+λT(f+Bu)=λTf+j=1∑qwj∣uj(t)∣+uj[λTB(:,j)]
这个系统的协态方程与上面的问题一样
λ
˙
=
−
∂
H
∂
x
=
−
∂
f
T
∂
x
λ
−
∑
j
=
1
q
u
j
(
∂
B
(
:
,
j
)
T
∂
x
λ
)
=
−
[
∂
f
T
∂
x
+
∑
j
=
1
q
u
j
(
∂
B
(
:
,
j
)
T
∂
x
)
]
λ
\dot\lambda=-\frac{\partial H}{\partial x}\\= -\frac{\partial f^\mathrm T}{\partial x}\lambda-\sum_{j=1}^qu_j(\frac{\partial B(:,j)^\mathrm T}{\partial x}\lambda)=-[\frac{\partial f^\mathrm T}{\partial x}+\sum_{j=1}^qu_j(\frac{\partial B(:,j)^\mathrm T}{\partial x})]\lambda
λ˙=−∂x∂H=−∂x∂fTλ−j=1∑quj(∂x∂B(:,j)Tλ)=−[∂x∂fT+j=1∑quj(∂x∂B(:,j)T)]λ
下面考察极小值原理,则对每个
u
j
,
j
=
1
,
2
,
⋯
,
q
u_j, j=1,2,\cdots,q
uj,j=1,2,⋯,q,需要考虑
∑
j
=
1
q
w
j
∣
u
j
∗
(
t
)
∣
+
u
j
∗
[
λ
T
B
(
:
,
j
)
]
≤
∑
j
=
1
q
w
j
∣
u
j
(
t
)
∣
+
u
j
[
λ
T
B
(
:
,
j
)
]
\sum_{j=1}^qw_j|u_j^*(t)|+u_j^*[\lambda^\mathrm T B(:,j)]\leq \sum_{j=1}^qw_j|u_j(t)|+u_j[\lambda^\mathrm T B(:,j)]
j=1∑qwj∣uj∗(t)∣+uj∗[λTB(:,j)]≤j=1∑qwj∣uj(t)∣+uj[λTB(:,j)]
为了具体知道参数对于最优控制的影响,定义
g
(
u
j
)
≜
∣
u
j
(
t
)
∣
+
λ
T
B
(
:
,
j
)
w
j
u
j
=
∣
u
j
(
t
)
∣
+
p
j
⋅
u
j
g(u_j)\triangleq|u_j(t)|+\frac{\lambda^\mathrm T B(:,j)}{w_j}u_j=|u_j(t)|+p_j\cdot u_j
g(uj)≜∣uj(t)∣+wjλTB(:,j)uj=∣uj(t)∣+pj⋅uj
上式定义的函数 g ( u j ) g(u_j) g(uj)的函数曲线是分段线性的,而且它分两段,具体的取值可以看下面的图
| p j < − 1 p_j<-1 pj<−1 | p j ∈ ( − 1 , 0 ) p_j\in(-1,0) pj∈(−1,0) | p j ∈ ( 0 , 1 ) p_j\in(0,1) pj∈(0,1) | p j > 1 p_j>1 pj>1 |
|---|---|---|---|
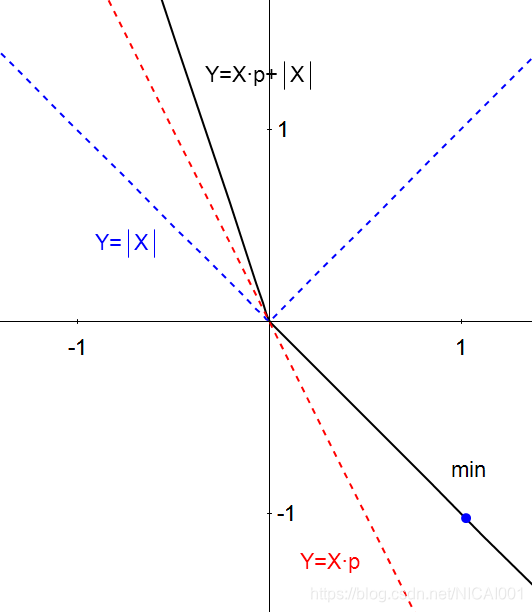 | 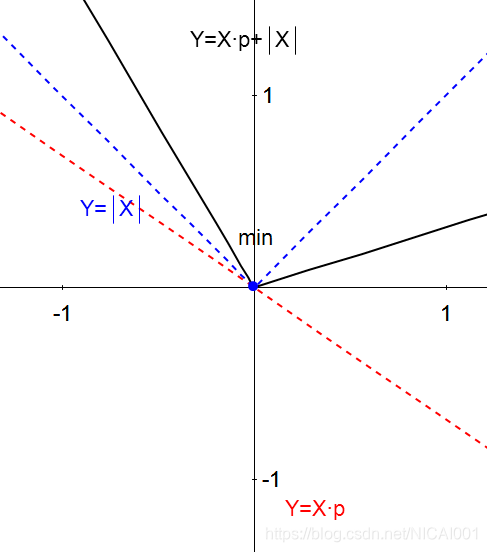 | 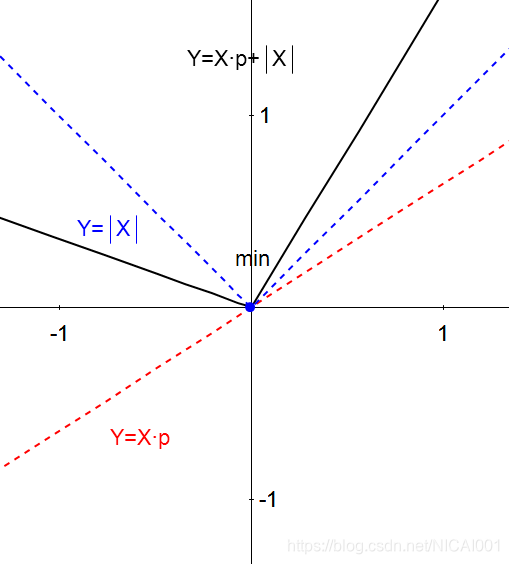 | 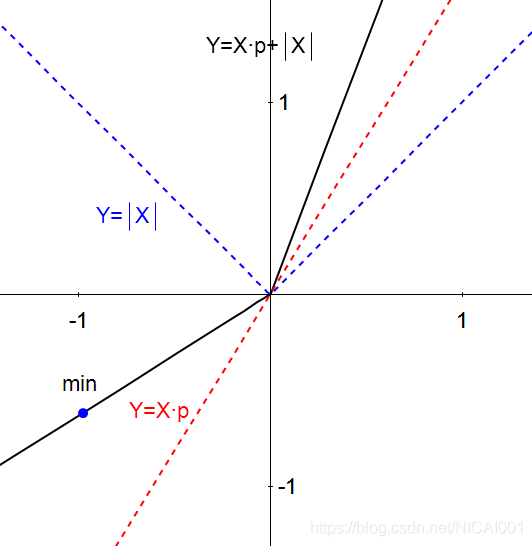 |
| 图1 | 图2 | 图3 | 图4 |
| u j ∗ = 1 u_j^*=1 uj∗=1 | u j ∗ = 0 u_j^*=0 uj∗=0 | u j ∗ = 0 u_j^*=0 uj∗=0 | u j ∗ = − 1 u_j^*=-1 uj∗=−1 |
考虑到控制受限
∣
u
j
(
t
)
∣
≤
1
|u_j(t)|\leq1
∣uj(t)∣≤1,于是最优控制的取值如下
u
j
∗
=
{
1
,
p
j
<
−
1
∃
u
j
∈
[
0
,
1
]
,
p
j
=
−
1
0
,
p
j
∈
(
−
1
,
1
)
∃
u
j
∈
[
−
1
,
0
]
,
p
j
=
1
−
1
,
p
j
>
1
u_j^*=\left\{\begin{matrix} 1,&p_j<-1\\ \exist u_j\in[0,1],&p_j=-1\\ 0,&p_j\in(-1,1)\\ \exist u_j\in[-1,0],&p_j=1\\ -1,&p_j>1\\ \end{matrix}\right.
uj∗=⎩
⎨
⎧1,∃uj∈[0,1],0,∃uj∈[−1,0],−1,pj<−1pj=−1pj∈(−1,1)pj=1pj>1
其中的
p
j
=
λ
T
B
(
:
,
j
)
/
w
j
p_j=\lambda^\mathrm T B(:,j)/w_j
pj=λTB(:,j)/wj.控制方程中的
∃
u
j
∈
[
0
,
1
]
\exist u_j\in[0,1]
∃uj∈[0,1]代表控制处在这个区间,具体的求解方法属于奇异最优控制理论的范畴。在此暂时不给出。
注2: 若控制的约束为
u
j
(
t
)
∈
[
0
,
1
]
u_j(t)\in[0,1]
uj(t)∈[0,1],看图可得最小的Hamiltonian在这些点取得
u
j
∗
=
{
1
,
p
j
<
−
1
∃
u
j
∈
[
0
,
1
]
,
p
j
=
−
1
0
,
p
j
>
−
1
u_j^*=\left\{\begin{matrix} 1,&p_j<-1\\ \exist u_j\in[0,1],&p_j=-1\\ 0,&p_j>-1\\ \end{matrix}\right.
uj∗=⎩
⎨
⎧1,∃uj∈[0,1],0,pj<−1pj=−1pj>−1
3.2 例3. 二次积分燃料最优控制
系统模型不变,性能指标改变
x
˙
1
(
t
)
=
x
2
(
t
)
,
x
˙
2
(
t
)
=
u
(
t
)
x
(
0
)
=
[
x
10
,
x
20
]
,
x
(
t
f
)
=
[
0
,
0
]
,
t
f
free
min
∣
u
(
t
)
∣
≤
1
J
=
∫
0
t
f
∣
u
∣
d
t
\dot x_1(t)=x_2(t),\dot x_2(t)=u(t)\\ \mathbf x(0)=[x_{10},x_{20}],\mathbf x(t_f)=[0,0],t_f\text{ free}\\ \min_{|u(t)|\leq 1}J=\int_0^{t_f}|u|\text dt
x˙1(t)=x2(t),x˙2(t)=u(t)x(0)=[x10,x20],x(tf)=[0,0],tf free∣u(t)∣≤1minJ=∫0tf∣u∣dt
这个问题可以看做最优燃料问题的一维形式。构建Hamilton函数、
H
(
x
(
t
)
,
λ
(
t
)
,
u
(
t
)
,
t
)
=
∣
u
∣
+
λ
1
x
2
+
λ
2
u
H(x(t),\lambda(t),u(t),t)=|u|+\lambda_1x_2+\lambda_2u
H(x(t),λ(t),u(t),t)=∣u∣+λ1x2+λ2u
其协态方程和边界条件很容易写出,在此略去。根据极小值原理,控制方程有:
∣
u
∗
∣
+
λ
2
u
∗
≤
∣
u
∣
+
λ
2
u
=
g
(
u
)
|u^*|+\lambda_2u^*\leq|u|+\lambda_2u=g(u)
∣u∗∣+λ2u∗≤∣u∣+λ2u=g(u)
u ∗ u^* u∗取函数 g ( u ) g(u) g(u)的最小值,而函数 g ( u ) g(u) g(u)只受 λ 2 \lambda_2 λ2影响,不同取值有不同的形态,而这结果与多维问题的图一样。
| λ 2 < − 1 \lambda_2<-1 λ2<−1 | λ 2 ∈ ( − 1 , 0 ) \lambda_2\in(-1,0) λ2∈(−1,0) | λ 2 ∈ ( 0 , 1 ) \lambda_2\in(0,1) λ2∈(0,1) | λ 2 > 1 \lambda_2>1 λ2>1 |
|---|---|---|---|
| 如图1 | 如图2 | 如图3 | 如图4 |
| u ∗ = 1 u^*=1 u∗=1 | u ∗ = 0 u^*=0 u∗=0 | u ∗ = 0 u^*=0 u∗=0 | u ∗ = − 1 u^*=-1 u∗=−1 |
最优控制律为
u
∗
=
{
−
sign
(
λ
2
)
,
∣
λ
2
∣
>
1
0
,
∣
λ
2
∣
<
1
∃
u
∈
[
0
,
1
]
,
λ
2
=
−
1
∃
u
∈
[
−
1
,
0
]
,
λ
2
=
1
u^*=\left\{\begin{matrix} -\text{sign}(\lambda_2),&|\lambda_2|>1\\ 0,&|\lambda_2|<1\\ \exist u\in[0,1],&\lambda_2=-1\\ \exist u\in[-1,0],&\lambda_2=1\\ \end{matrix}\right.
u∗=⎩
⎨
⎧−sign(λ2),0,∃u∈[0,1],∃u∈[−1,0],∣λ2∣>1∣λ2∣<1λ2=−1λ2=1
在
λ
2
=
±
1
\lambda_2=\pm1
λ2=±1时,控制并不是任意的,而是有进一步的判定条件。有关奇异弧段最优控制的相关方法,请参考具体文献。
4. 数值求解
极大值原理求解最优控制问题属于间接法,它的数值求解基本思路仍然是求解Hamilton系统,也就是包含状态 x ( t ) x(t) x(t),协态 λ ( t ) \lambda(t) λ(t)的变化。它与Hamilton函数法求解的主要区别是,状态方程和协态方程是间断性的,也就是在开关开2种系统方程之间切换,这样构成的问题属于多点边值问题。类似于前面最优控制理论 三、两点边值问题求解这一节的思路,主要求解步骤是猜测协态变量的初始值 λ ( t 0 ) \lambda(t_0) λ(t0),然后代入求解Bang-Bang控制的哈密尔顿系统,通过非线性方程求根方法得到准确的协态初值,积分这个ODE系统自然能得到最优控制的解析解 u ( x , λ ) u(x,\lambda) u(x,λ)。
参考文献
[1] 邢继祥. 最优控制应用基础 Sec 2.4~Sec 2.8 [M]. 科学出版社, 2003.
[2] Bryson A E , Ho Y C ,Applied optimal control : optimization, estimation, and control Sec 3.8~Sec 3.12 [J]. IEEE Transactions on Systems Man & Cybernetics, 1975
[3] MIT OpenCourseWare 16.323 Principles of Optimal Control - Lecture 9: Constrained Optimal Control
[4] 百度文库-3. 极大值原理
[5] CSDN - An Introduction to Mathematical Optimal Control Theory-Notes v2.0.pdf- Ch.4 The Pontryagin Maximum Principle [M] Lawrence C. Evans (American Math Society, 2013) 原文链接

















 7148
7148

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









