







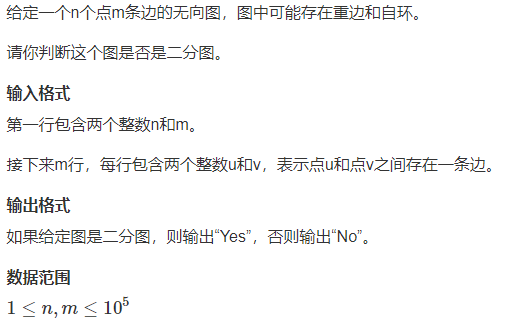
1.染色法判定二分图 O(n+m)
重要性质: 1.一个图是二分图,当且仅当(<=>)图中不含奇数环(环当中的边数是奇数)
2.一个图不含奇数环,则一定是二分图
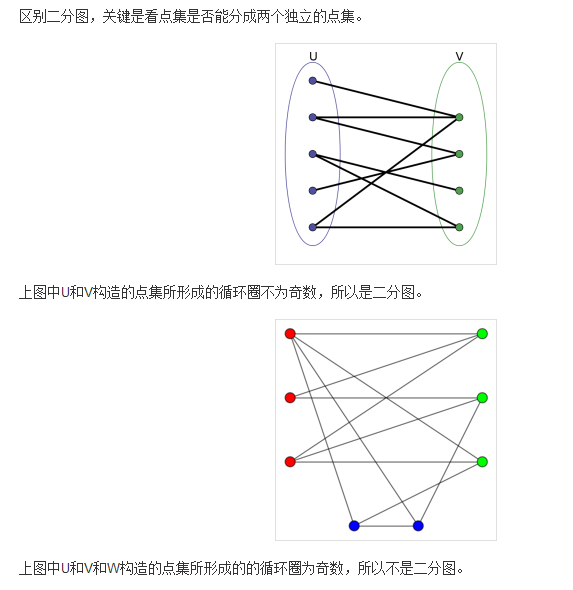
二分图:一个图中的所有点能被划分在两个集合中,它们之前的边都不存在于集合内,而是在集合之间
- 设G=(V,E)是一个无向图,如果顶点V可分割为两个互不相交的子集(A,B),并且图中的每条边(i,j)所关联的两个顶点i和j分别属于这两个不同的顶点集(i in A,j in B),则称图G为一个二分图。
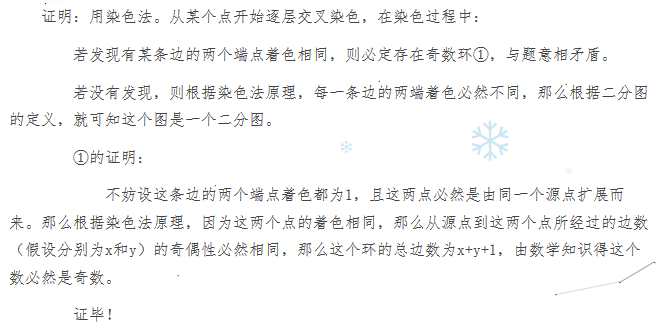
二分图染色
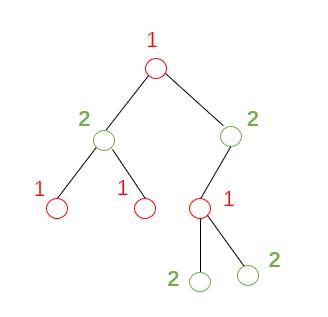
由于图中不含奇数环,所以染色过程中一定没有矛盾
反证法:假设染色过程中出现了矛盾。
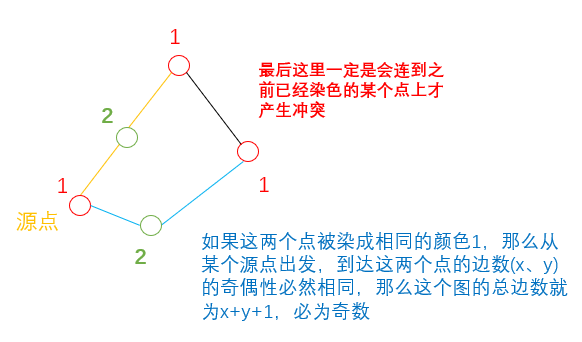
所以染色过程中一旦出现了矛盾,就一定存在奇数环。
可以通过dfs去判断染色是否会出现矛盾=>是否存在奇数环=>是否是二分图
注意:二分图不一定是连通的 ,只要能将所有点分成两个集合,使得所有边只出现在集合之间即可
所以要在主函数中加一重循环
基本思路
for(int i=1;i<=n;i++)
if i 未染色
dfs(i,color)//就通过dfs给它染色
例题
“包含自环、重边”的描述,是为了告诉大家算法本身可以有效处理这种边界问题,如果有自环的话,就会发现自环这条边的两端颜色相同,就矛盾了。
输入
4 4
1 3
1 4
2 3
2 4
输出
Yes
代码
#include <iostream>
#include <queue>
#include <cstring>
#include <algorithm>
const int maxn=1e5+5;
const int INF=0x3f3f3f3f;
using namespace std;
int n,m;
int h[maxn],e[2*maxn],nex[2*maxn],idx;//注意存边的时候要扩大一倍,因为要存储双向边
int color[maxn];//存储该结点被染的颜色
void add(int a,int b)
{
e[idx]=b;
nex[idx]=h[a];
h[a]=idx++;
}
bool dfs(int k,int c)
{
color[k]=c;//染色
for(int i=h[k];i!=-1;i=nex[i])//遍历一下当前结点的所有邻结点
{
int j=e[i];
if(!color[j])//如果当前没有被染色
{
if(!dfs(j,-c))//染色记号为1或2,就用1+2-c,染色记号为1或-1就直接取负就可以
return false;//要这样递归的去看之后的结点会不会产生矛盾
}
else if(color[j]==c)//本身可以处理掉有自环的情况
return false;
}
return true;
}
int main()
{
cin>>n>>m;
memset(h,-1,sizeof(h));//一开始忘记初始化了,会导致结果错误
for(int i=0;i<m;i++)
{
int a,b;
cin>>a>>b;
add(a,b);
add(b,a);//无向图
}
bool flag=true;
for(int i=1;i<=n;i++)//因为二分图可能是不连通的,然后要保证每个连通分量都被着色
{
if(!color[i])//如果这个点没有被染色
{
if(!dfs(i,1))//如果dfs染色失败
{
flag=false;
break;
}
}
}
if(flag)
cout<<"Yes"<<endl;
else
cout<<"No"<<endl;
return 0;
}
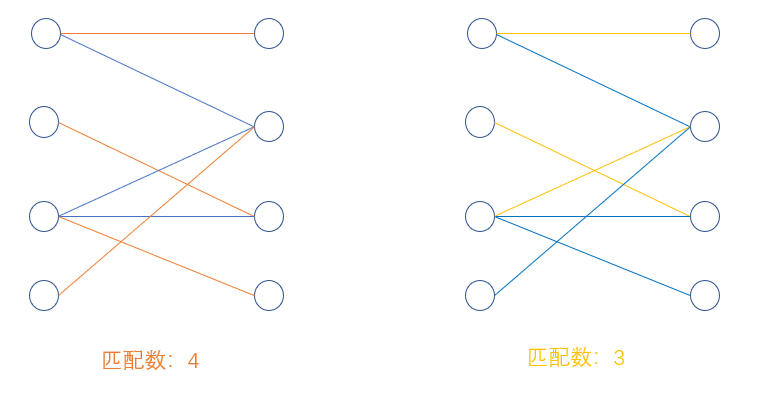
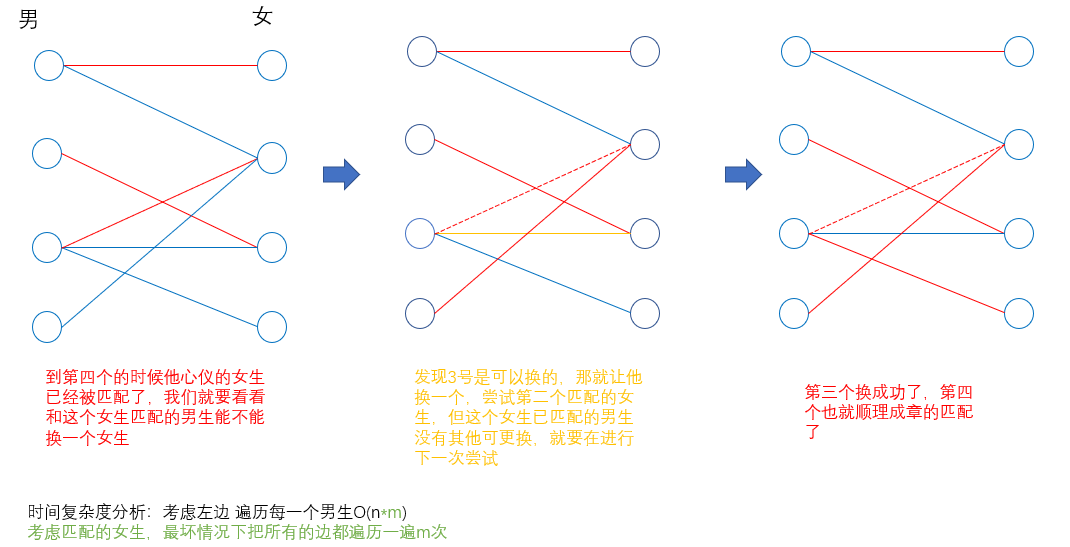
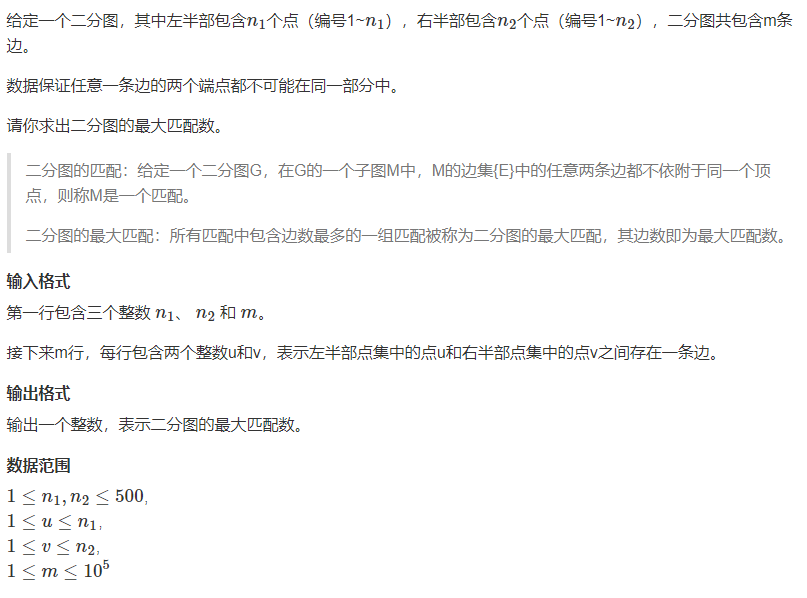
2.匈牙利算法 O(mn),但实际运行时间一般远小于这个
基本思路
匈牙利算法用来找二分图的最大匹配
算法证明参照《算法导论》
例题
题目保证了是二分图
输入
2 2 4
1 1
1 2
2 1
2 2
输出
2
代码
数组尽量开大一点,如果数组越界,什么问题都能发生,不仅仅是段错误
注意这里只要存从左边到右边方向即可,因为是遍历男生去找匹配的,且两个点集的编号是重合的如果再add(2,1)有可能多了一条边会造成错误。
#include <iostream>
#include <queue>
#include <cstring>
#include <algorithm>
const int maxn=1e5+5;
const int INF=0x3f3f3f3f;
using namespace std;
int n1,n2,m;
int h[maxn],e[2*maxn],nex[2*maxn],idx;//注意存边的时候要扩大一倍,因为要存储双向边
int match[maxn];//存储女生所匹配的男生
bool st[maxn];//标记女生有没有被考虑过(即这个点有没有被访问过)
void add(int a,int b)
{
e[idx]=b;
nex[idx]=h[a];
h[a]=idx++;
}
bool find(int x)
{
for(int i=h[x];i!=-1;i=nex[i])//枚举这个男生心仪的女生
{
int j=e[i];
if(!st[j])//j没有被访问过
{
st[j]=true;
if(!match[j]||find(match[j]))//女生没有匹配的男生或女生所匹配的男生能够换一个女生匹配
{
match[j]=x;//就让这个女生和现在这个男生匹配
return true;
}
}
}
return false;
}
int main()
{
cin>>n1>>n2>>m;
memset(h,-1,sizeof(h));//一开始忘记初始化了,会导致结果错误
for(int i=0;i<m;i++)
{
int a,b;
cin>>a>>b;
add(a,b);//因为遍历男生去找匹配的女生即可,所以只要存储左边到右边方向即可
//add(b,a);//无向图
}
int ans=0;
for(int i=1;i<=n1;i++)
{
fill(st,st+maxn,false);//注意这个st数组初始化的位置,如果放在循环外会出错
if(find(i))
ans++;
}
cout<<ans<<endl;
return 0;
}
st数组用来判重,避免在某次匹配中重复遍历点和边
st数组用来防止重复搜索相同的点。当图中有环的时候,不加st数组可能会无限循环下去,就出现段错误了
- “不加st数组的话,如果遇到偶数长度回路(双向边)的话就会陷入递归死循环。对于为什么加入st数组仍然可以保证答案正确,首先每次为一个点做匹配时,都会将st数组全部初始化为false,即find函数是为把当前这个点匹配出去而进行尝试。下面分为三种情况,第一种,直接匹配成功,显然与st数组没什么关系;第二种,第一次想要匹配的点已经被匹配过了,但是通过递归调换最后匹配成功,同样st数组不会影响答案;第三种,设当前正在尝试与可以和它进行匹配的第k个点进行匹配,之前k-1个可以与它匹配的点的匹配尝试均失败,在递归调换的过程中某个点遇到了被标记的点,那么说明与这个点匹配的点无法做出”妥协”,所以就可以不必在从这个被标记的点在往下尝试。这样可以保证每个点只会被被递归访问一次,那么每条边也只会被访问一次,从而可以保证匈牙利算法的复杂度上限为O(NM)。”
- “1.经过测试,若不加st数组,MLE,应该是爆栈了。所以必须要加 2.虽然我们看for (int i = h[x]; i != -1; i = ne[i]),的确对于x只会遍历x的所有邻边且一次,遍历完后自然就结束了,但是st这里还有个作用,作为递归以防死循环。
–> eg:比如当前层:x尝试找j女生,然后j女生已经匹配,那么递归到下一层。我们尝试math[j]的男生去匹配,假如math[j]的男生也去找j女生(这个j女与上一层女生同一人),那么尴尬了与上一层x尝试找j女生的情况等价,那么再递归找math[j]…显然死循环了。这里只是说一种st必须存在的必要性,较局限。”















 746
746











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









