






自适应巡航控制,ACC,模型预测控制,MPC,纵向跟车避撞控制为分层式控制,上层控制得到期望加速度,下层控制得到对应的期望制动压力和节气门开度。
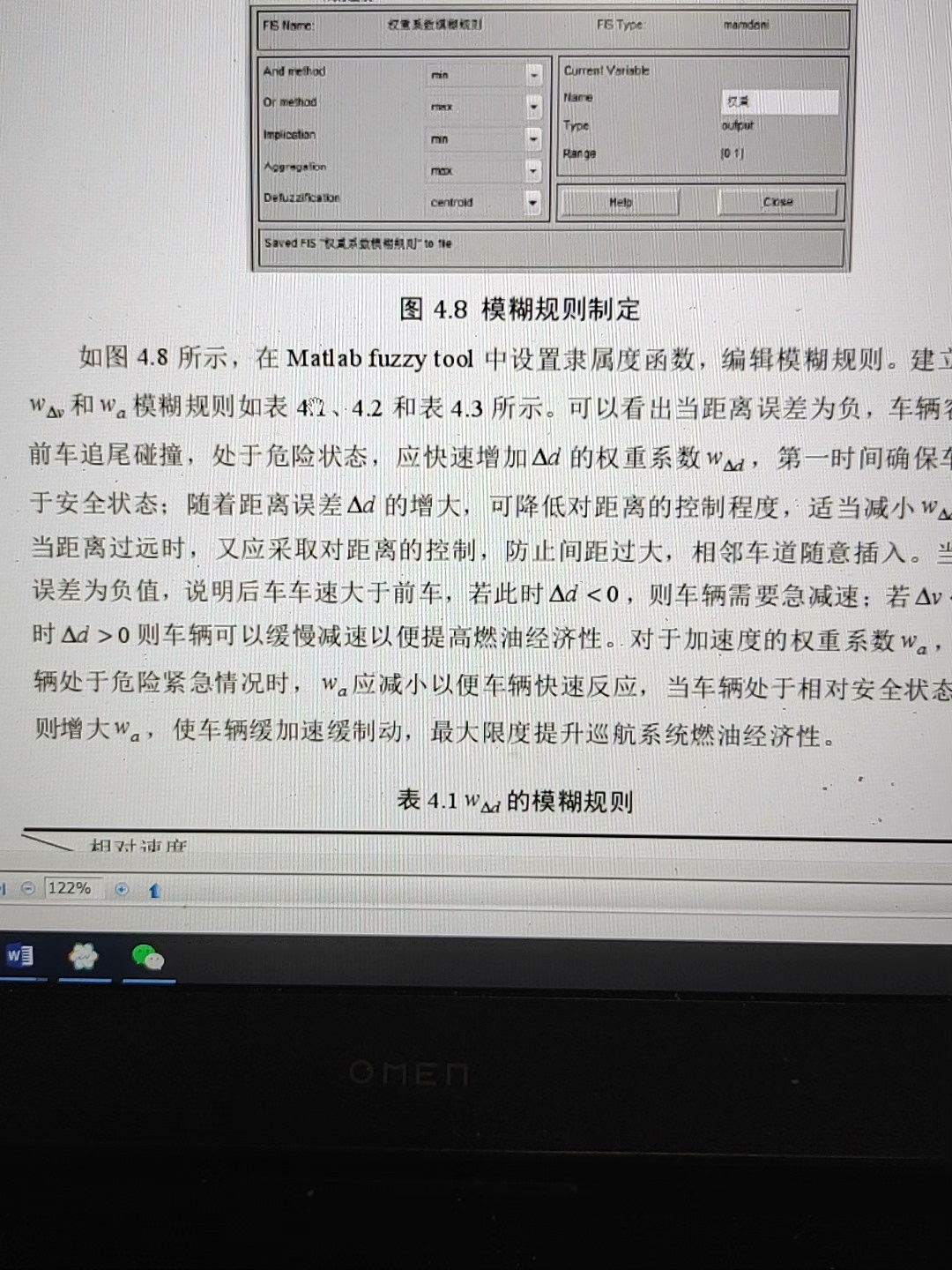
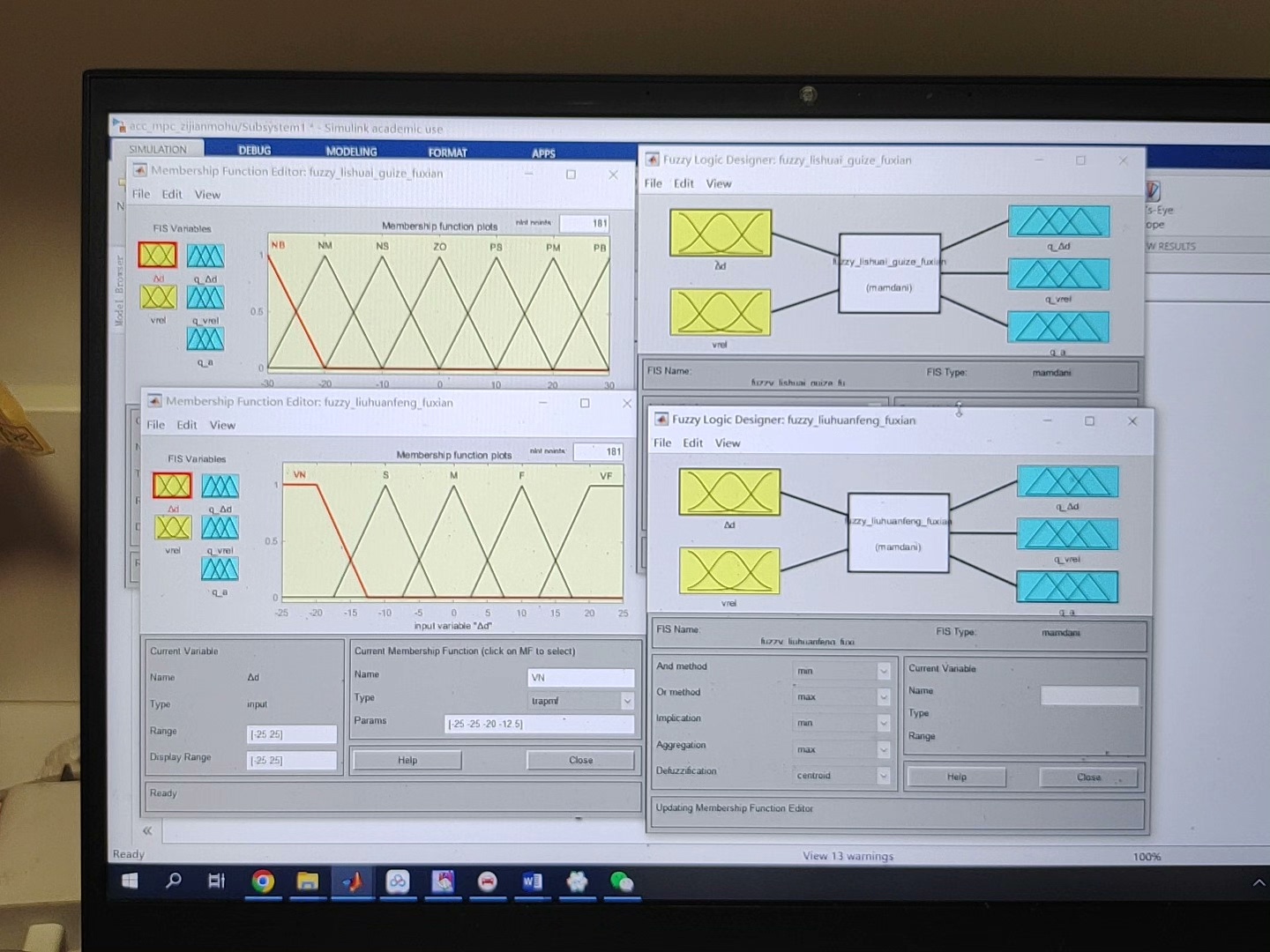
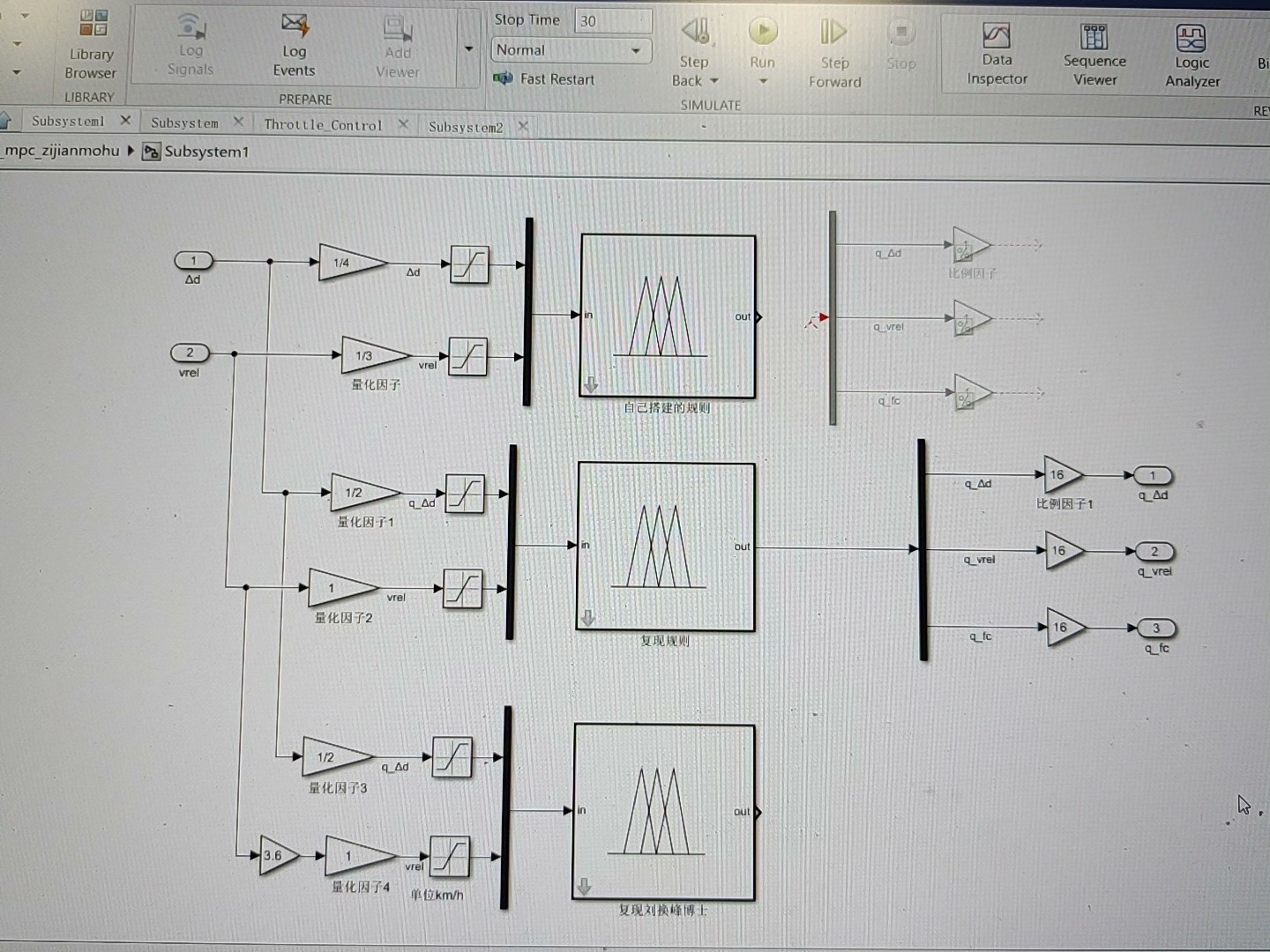
上层控制首先建立考虑前车加速度扰动的离散跟车运动学模型,然后建立了基于反馈校正的跟车预测模型,接着引入松弛因子与多目标优化求解,大概几百行MPC代码,最后是基于模糊控制的权重系数调整,这是该模型中最重要的一点,当MPC目标函数中的权重系数取为定值时,难以适应复杂多变的道路交通环境,通过根据跟车性、安全性、舒适性以及经济性的偏重程度来设计相对应的权重系数调整策略,可以改善跟车避撞系统对交通环境的适应性,参考其他文献自己搭建的模糊控制规则得到可变权重,这也是ACC控制不同于网上烂大街的普通ACC控制的独特所在,设置了合理的模糊规则,基本论域、模糊集论域、量化因子,比例因子,调整的权重主要有:车间距误差权重系数q_Δd、两车相对速度权重系数q_vrel和自车加速度权重系数q_ar,而把自车跃度q_jr设置为常量,若q_jr也为变权重系数时会使得模糊控制系统过于复杂,易不稳定。
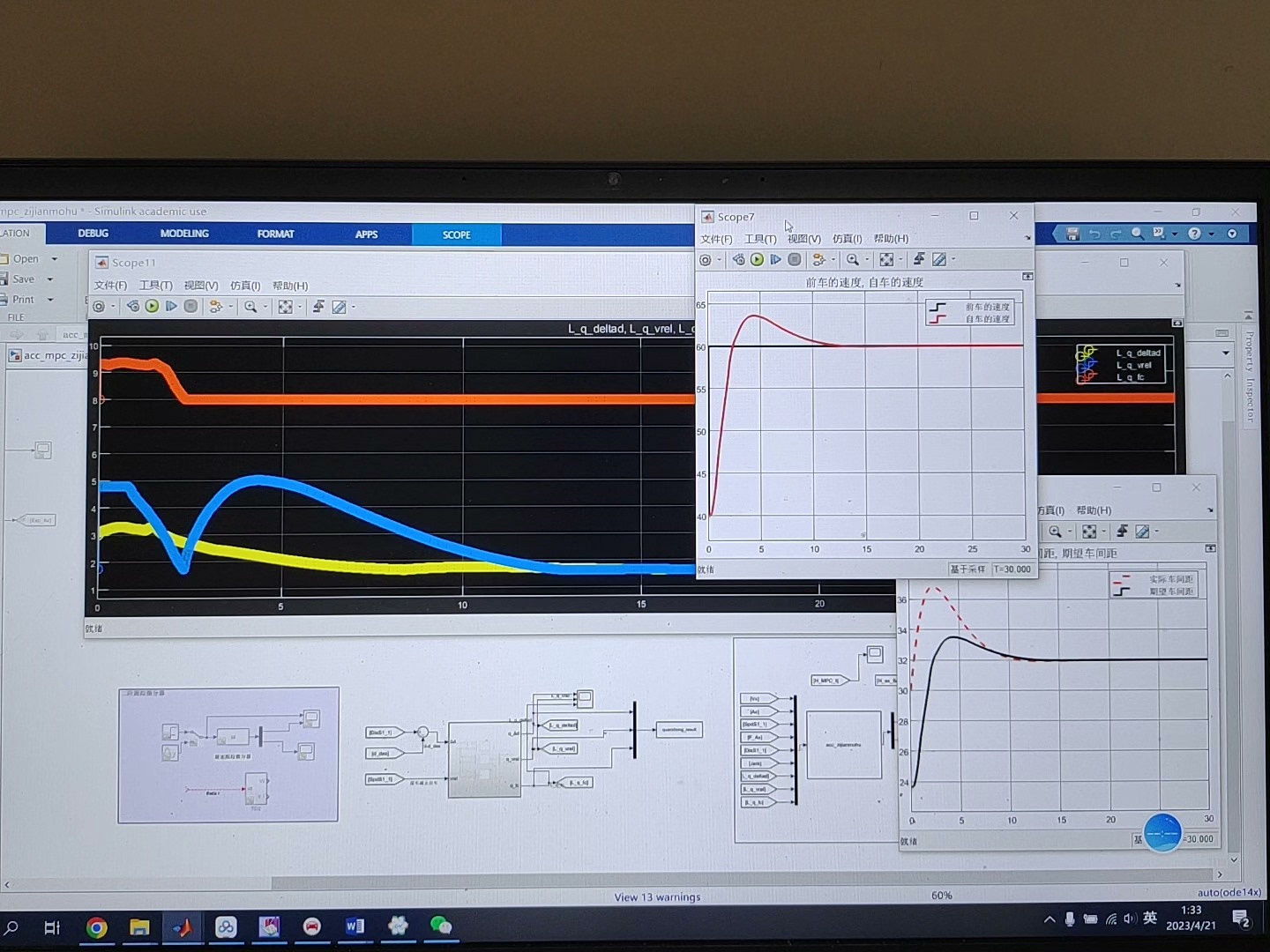
控制效果:匀速输入时,车间距、相对速度、自车的加速度、跃度、期望制动压力和节气门开度均能在满足多目标约束的条件下平稳进行变化,实现平稳跟车。
Matlab/Simulink版本:2021a
Carsim版本:2019.0
有完整的运行视频。
提供参考资料。
ID:86189713574052396
倒着走的三三
自适应巡航控制(ACC)中的模型预测控制(MPC)与纵向跟车避撞控制的分层式策略
在现代汽车技术中,自适应巡航控制(ACC)已经成为提高行车安全性和驾驶舒适性的重要手段。其中,模型预测控制(MPC)作为ACC系统的重要组成部分,通过精确的数学模型对未来状态进行预测,并据此优化控制策略,以确保车辆的稳定行驶。本文将深入探讨基于MPC的ACC系统及其纵向跟车避撞控制的分层式策略。
一、自适应巡航控制(ACC)概述
自适应巡航控制(ACC)是一种先进的驾驶辅助系统,通过感知车辆周围的环境信息,自动调整车辆的速度和距离,以保持与前车的安全距离。ACC系统的主要目标包括:
- 保持与前车的安全距离,避免碰撞;
- 在保持安全距离的同时,提高驾驶的舒适性和经济性。
二、模型预测控制(MPC)在ACC系统中的应用
模型预测控制(MPC)是一种优化控制策略,通过构建一个预测模型,对未来状态进行预测,并据此优化控制策略。在ACC系统中,MPC用于预测和优化车辆的行驶路径,以确保安全、舒适和经济的驾驶。
- 离散跟车运动学模型:在ACC系统中,我们首先建立一个考虑前车加速度扰动的离散跟车运动学模型。这个模型能够反映车辆的实际运动状态,并用于预测未来的车辆位置。
- 跟车预测模型:基于反馈校正,我们建立一个跟车预测模型。这个模型能够考虑车辆的动力学特性,并预测未来的车辆状态。
- 松弛因子与多目标优化:在MPC中,我们引入松弛因子,用于平衡跟车性、安全性和舒适性。通过多目标优化,我们确保车辆能够在满足所有约束条件的情况下,实现最优的行驶路径。
三、分层式控制策略
在ACC系统中,纵向跟车避撞控制通常采用分层式策略。上层控制主要负责计算期望加速度,下层控制则根据期望加速度计算对应的期望制动压力和节气门开度。
- 上层控制:上层控制首先基于建立的跟车运动学模型和预测模型,计算出期望的加速度。这个加速度用于指导车辆行驶,确保与前车的安全距离。
- 下层控制:下层控制根据期望的加速度,计算出对应的期望制动压力和节气门开度。这个控制策略确保了车辆能够按照期望的加速度行驶,同时保持与前车的安全距离。
四、模糊控制在权重系数调整中的应用
在MPC中,权重系数的选择对系统的性能有重要影响。当权重系数取为定值时,系统难以适应复杂多变的道路交通环境。为了解决这个问题,我们引入模糊控制,根据跟车性、安全性、舒适性以及经济性的偏重程度,设计相应的权重系数调整策略。
- 模糊控制规则:我们参考其他文献,搭建模糊控制规则。这个规则可以根据车辆的实际状态,动态调整权重系数,以适应不同的交通环境。
- 可变权重:通过模糊控制,我们可以实现权重系数的动态调整,使得系统能够更好地适应不同的交通环境。这种可变权重的设计,使得ACC系统具有更好的适应性和鲁棒性。
五、结论
在本文中,我们探讨了基于MPC的ACC系统及其纵向跟车避撞控制的分层式策略。通过引入模糊控制,我们实现了权重系数的动态调整,提高了系统对交通环境的适应性。未来,我们可以进一步研究如何进一步提高系统的性能,例如通过引入更多的传感器和算法,提高系统的精度和鲁棒性。
具体的代码,程序如下地址:http://wekup.cn/713574052396.html


















 484
484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









