







参考文献:
基于多目标柔化的电动汽车自适应巡航控制策略研究
电动机建模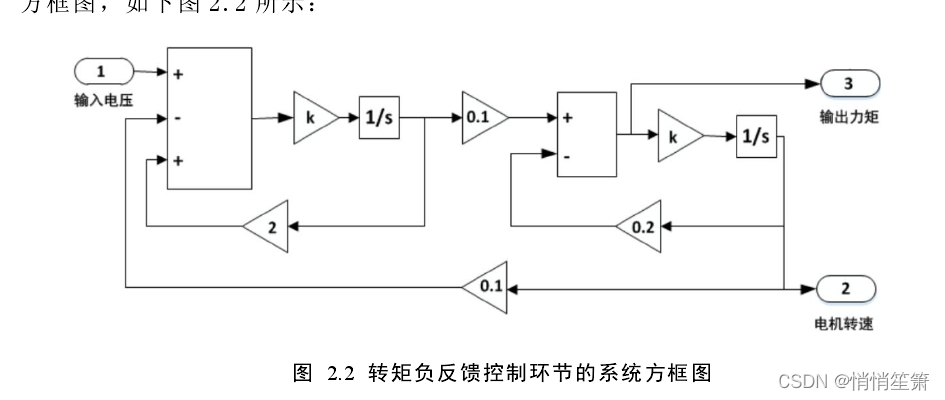
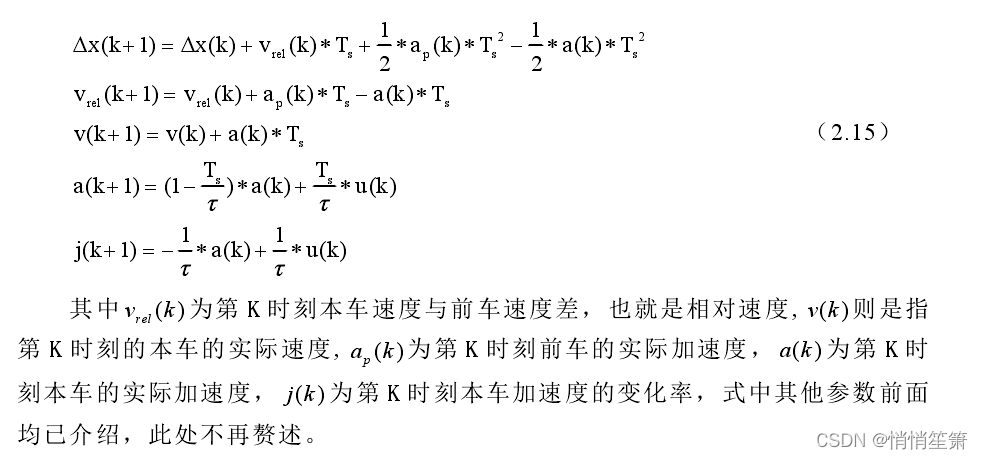
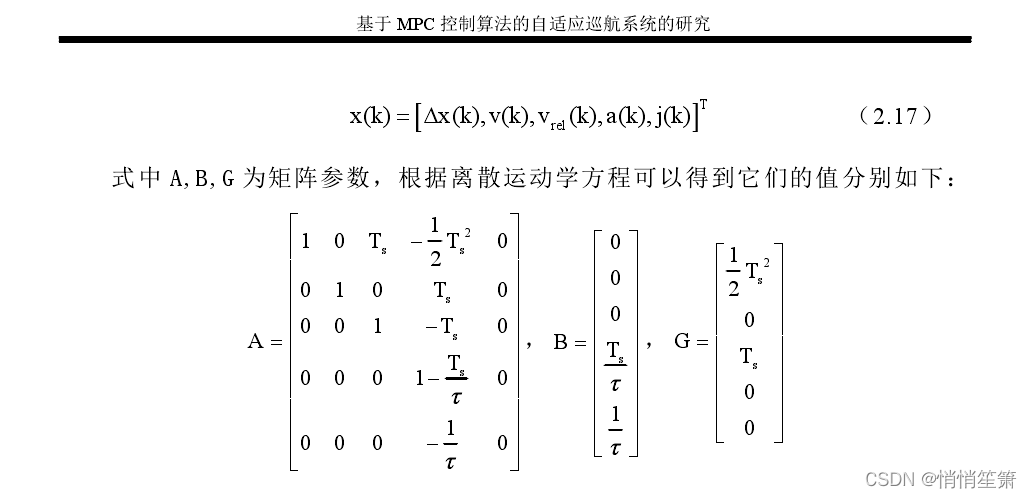
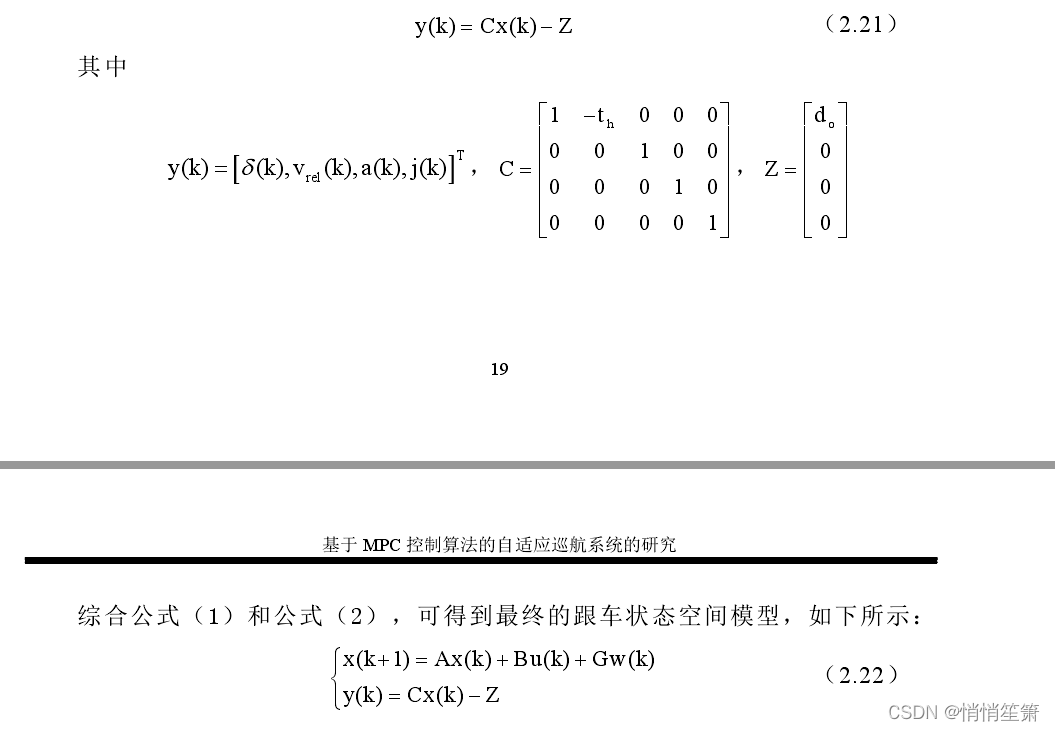
关于ACC常见公式的推导



同时需要针对系统的约束条件设置,可以根据实际经验设置速度范围为 0-40m/s,加速度的变化界限为-5.5-2.5m/2s ,加速度变化率的范围为-2-2m/3s ,前车加速度干扰值也设定在-5.5-2.5m/2s
参考文献:
基于多目标柔化的电动汽车自适应巡航控制策略研究
电动机建模
同时需要针对系统的约束条件设置,可以根据实际经验设置速度范围为 0-40m/s,加速度的变化界限为-5.5-2.5m/2s ,加速度变化率的范围为-2-2m/3s ,前车加速度干扰值也设定在-5.5-2.5m/2s
 1058
1036
655
2万+
1058
1036
655
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























