






卡尔曼滤波四元数姿态角仿真程序,EKF,UKF算法对比,附带C语言压缩包。
新增完整的单片机UKF实验项目代码
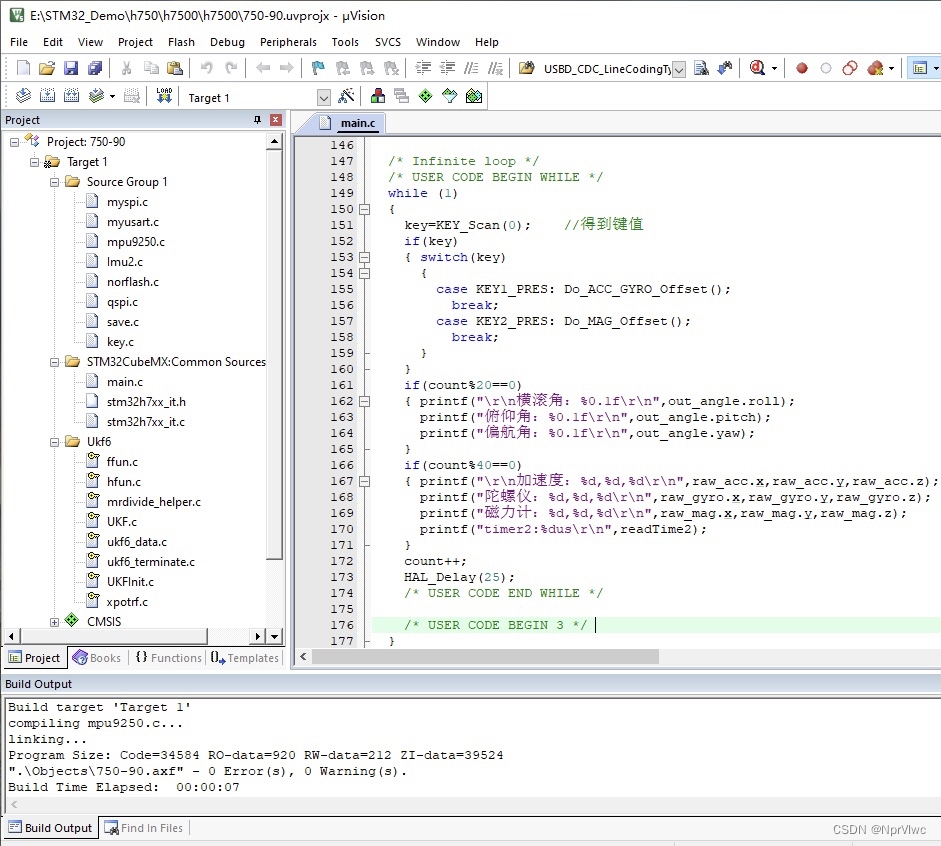
基于stm32h750+mpu9250+w25q64实现串口输出姿态角度和保存校准参数。
附带测量一次运行时间的创新功能,通过核心板按键的方式校准IMU单元。
软件工程调用keil中自带库方式组织,大大减小了软件包大小
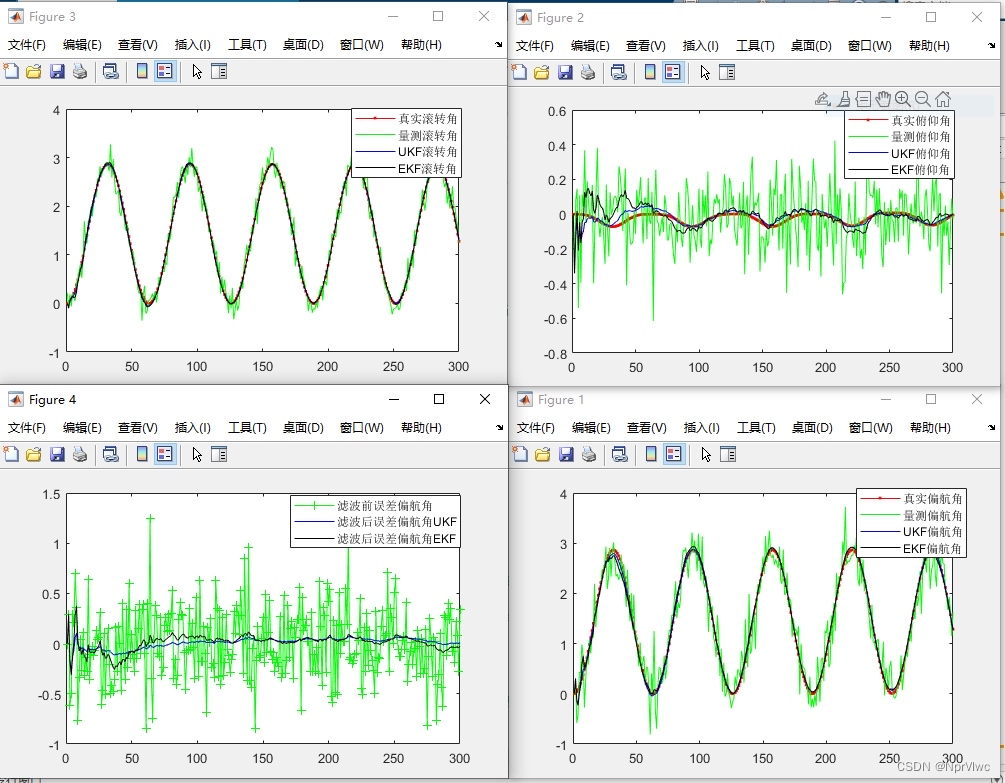
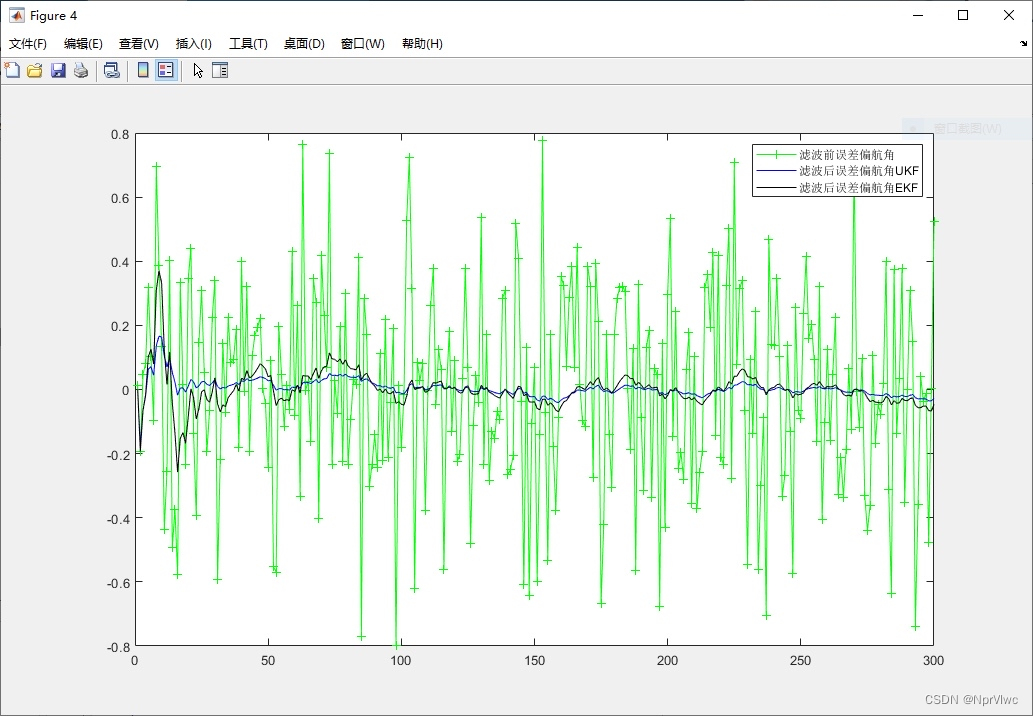
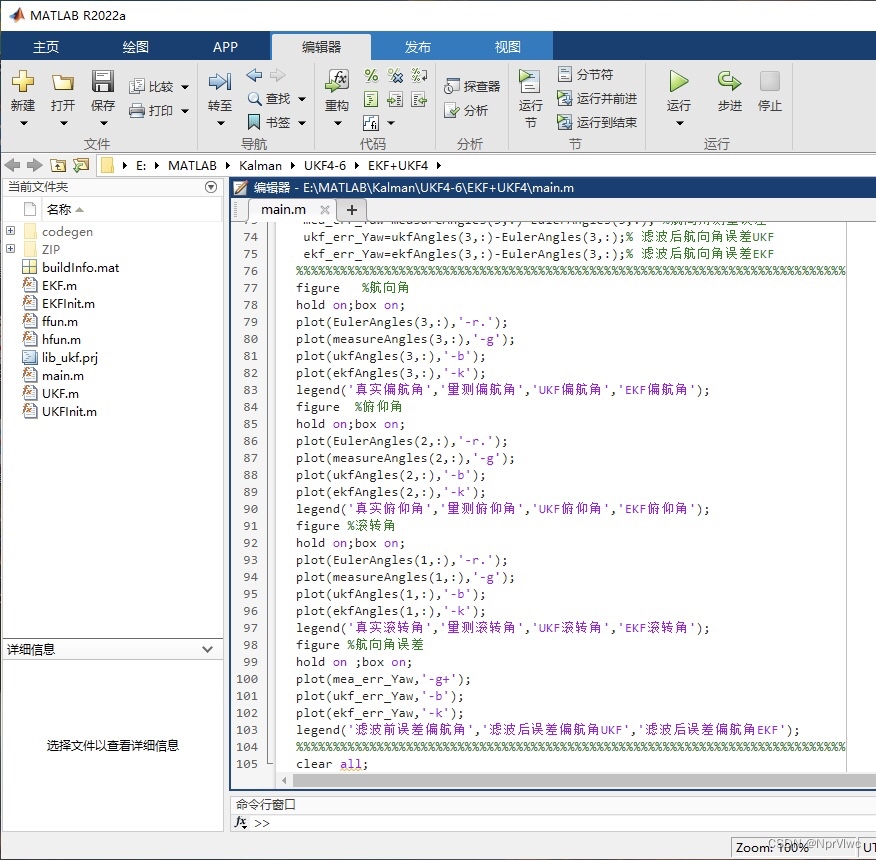
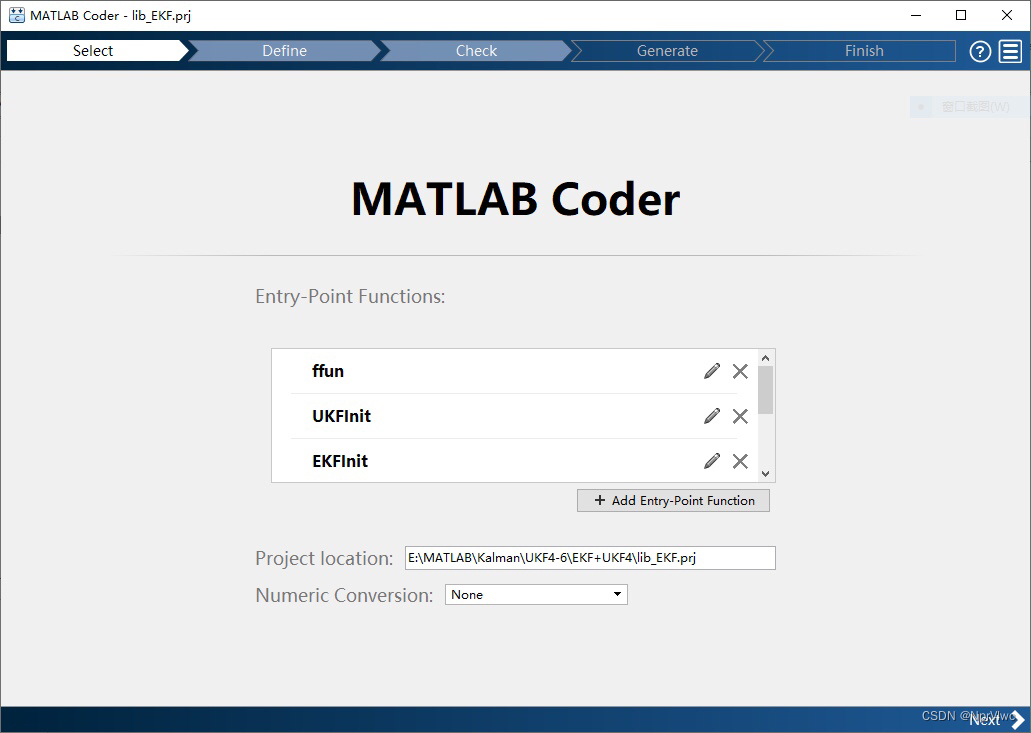
卡尔曼滤波在姿态角估计中的应用及其与扩展卡尔曼滤波和无迹卡尔曼滤波的对比
摘要:
姿态角估计是许多机器人和导航系统中的关键问题之一。卡尔曼滤波被广泛应用于姿态角估计领域,并且已经有了许多优化和扩展的变体算法。本文通过对比卡尔曼滤波、扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)算法在姿态角估计中的应用效果,来评估它们的性能和适用性。此外,本文还提供了一个基于STM32H750+MPU9250+W25Q64硬件平台的实验项目代码,用于演示单片机上的UKF姿态角估计,并附带了一个创新的功能,即通过按键校准IMU单元并测量一次运行时间。在软件工程中,我们使用Keil的自带库来组织代码,以减小软件包的大小。
关键词:卡尔曼滤波,姿态角估计,扩展卡尔曼滤波,无迹卡尔曼滤波,UKF,EKF,姿态角仿真,单片机,STM32H750,MPU9250,W25Q64,校准参数,运行时间测量
1. 简介
姿态角估计是机器人和导航系统中的一个重要问题,通过精确地估计物体在空间中的方位,可以实现许多应用,如航空航天、自动驾驶等。卡尔曼滤波是一种经典的估计算法,它通过融合传感器数据和系统模型来减小估计误差。本文将重点讨论卡尔曼滤波在姿态角估计中的应用,并与扩展卡尔曼滤波和无迹卡尔曼滤波进行对比。
2. 卡尔曼滤波在姿态角估计中的应用
卡尔曼滤波是一种递归的估计算法,它通过迭代的方式更新估计值和协方差矩阵。在姿态角估计中,卡尔曼滤波可以通过融合陀螺仪、加速度计和磁力计等传感器的数据来估计姿态角。根据系统模型和传感器的噪声特性,卡尔曼滤波可以自适应地调整权重,从而提高估计的准确性。
3. 扩展卡尔曼滤波(EKF)在姿态角估计中的应用
扩展卡尔曼滤波是对卡尔曼滤波的一种扩展,它通过线性化非线性系统模型和观测方程来近似处理非线性问题。在姿态角估计中,扩展卡尔曼滤波可以应用于非线性的姿态角估计问题,如欧拉角、四元数等。通过对非线性系统模型进行泰勒展开,扩展卡尔曼滤波可以近似估计系统的状态和协方差。
4. 无迹卡尔曼滤波(UKF)在姿态角估计中的应用
无迹卡尔曼滤波是对卡尔曼滤波的另一种扩展,它通过选择一组特定的采样点来近似非线性系统的状态和协方差。在姿态角估计中,无迹卡尔曼滤波可以应用于非线性的姿态角估计问题,如欧拉角、四元数等。通过使用一组特定的采样点,无迹卡尔曼滤波可以更准确地估计系统的状态和协方差。
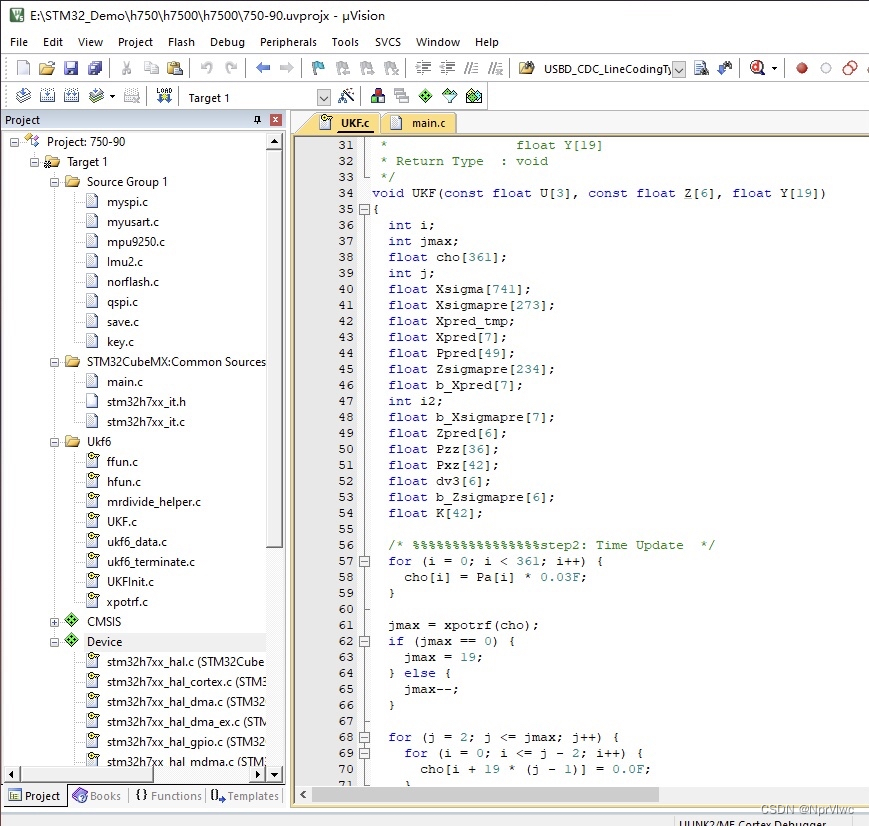
5. 实验演示项目
为了演示无迹卡尔曼滤波在姿态角估计中的应用,我们开发了一个基于STM32H750+MPU9250+W25Q64硬件平台的实验项目代码。该代码可以通过串口输出姿态角度,并保存校准参数到W25Q64存储器中。此外,我们还添加了一个创新的功能,通过核心板上的按键,可以进行IMU单元的校准,并测量一次运行时间。在软件工程中,我们使用Keil的
相关代码,程序地址:http://imgcs.cn/lanzoun/682736021322.html















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









