






 本文探讨了四旋翼飞行器的姿态自抗扰控制(ADRC)技术,其通过扰动观测器实现动态补偿,提高飞行器的稳定性和鲁棒性。虽然存在观测误差补偿和参数选择挑战,但ADRC在无人机领域有广阔的应用前景。
本文探讨了四旋翼飞行器的姿态自抗扰控制(ADRC)技术,其通过扰动观测器实现动态补偿,提高飞行器的稳定性和鲁棒性。虽然存在观测误差补偿和参数选择挑战,但ADRC在无人机领域有广阔的应用前景。
四旋翼飞行器姿态自抗扰控制
ID:5524670035618208
爱小马的海盐大傻
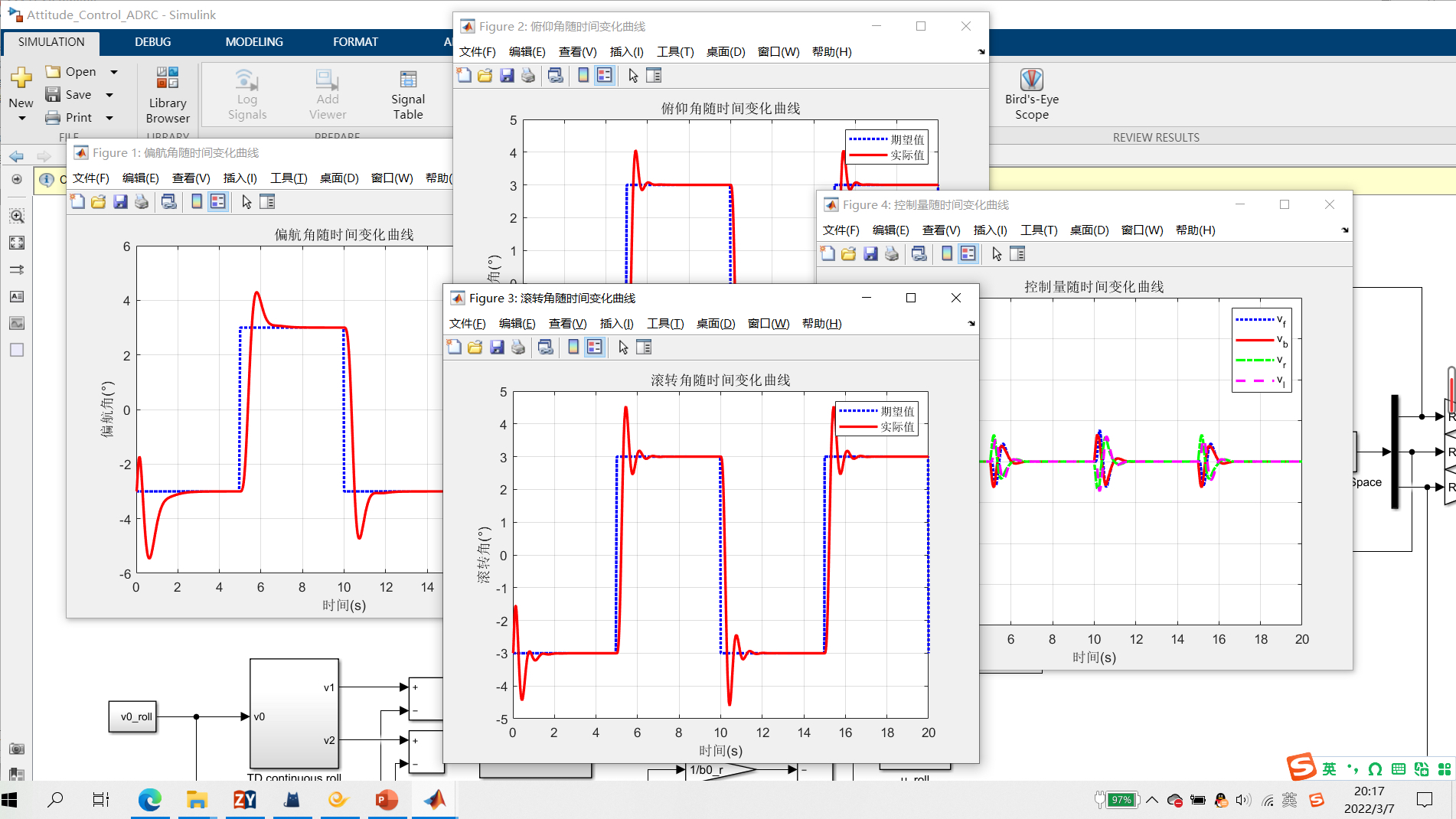
四旋翼飞行器(Quadcopter)作为一种常见的无人机类型,具有灵活、稳定的飞行性能,因此受到广泛应用和关注。在飞行器的控制中,姿态控制是一个重要的环节,它直接影响飞行器的稳定性和操控性能。而姿态自抗扰控制算法(Active Disturbance Rejection Control, ADRC)作为一种新兴的控制方法,可以有效地解决飞行器受到外部扰动时的姿态控制问题,提高飞行器的稳定性和鲁棒性。
在传统的姿态控制方法中,常常使用经验矩阵法或者PID控制器来进行姿态调节。然而,这些方法往往需要进行精细调参,并且对于复杂的飞行任务(如高速飞行、风速变化等)效果有限。而ADRC算法通过引入扰动观测器来实现对扰动的实时估计,从而实现了对姿态受扰动影响的实时补偿。同时,ADRC算法还具有自适应调参的特点,能够自动调整控制参数,适应不同的工况和飞行任务。
姿态自抗扰控制的基本原理是将飞行器的姿态控制问题转化为扰动抑制问题。在该控制算法中,首先需要建立飞行器的动力学模型和扰动模型。动力学模型描述了飞行器的运动规律,扰动模型描述了飞行器受到外部扰动时的响应。然后,利用扰动观测器对扰动进行实时估计,并在控制器中引入扰动补偿项,从而实现对扰动的抑制。最后,通过设计合适的控制参数和参数调整策略,实现对飞行器姿态的精确控制。
在四旋翼飞行器姿态控制中,ADRC算法具有许多优势。首先,由于ADRC算法引入了扰动观测器,可以对飞行器受到的外部扰动进行实时估计,从而能够更好地抑制扰动的影响,提高控制精度和稳定性。其次,ADRC算法具有自适应调参的特点,可以根据不同的飞行任务和环境条件自动调整控制参数,从而提高系统的适应性和鲁棒性。最后,由于ADRC算法不依赖于精确的模型,对于飞行器动力学特性的变化和参数的不确定性具有较好的鲁棒性。
然而,ADRC算法在实际应用中仍然存在一些问题和挑战。首先,由于ADRC算法引入了扰动观测器,需要对观测误差进行补偿,因此算法的鲁棒性和稳定性需要进一步的研究和改进。其次,ADRC算法对控制参数的选择和调整要求较高,需要通过实验和仿真来确定最优的参数组合。最后,ADRC算法在处理非线性系统和高阶系统时的效果还需要进一步验证和改进。
综上所述,四旋翼飞行器姿态自抗扰控制是一个具有挑战性和广泛应用前景的研究领域。ADRC算法作为一种新兴的控制方法,在姿态控制中具有一定的优势和潜力。通过进一步的研究和改进,可以提高ADRC算法在四旋翼飞行器姿态控制中的性能和鲁棒性,并为无人机的应用和发展提供更好的技术支持。希望本文对读者对四旋翼飞行器姿态自抗扰控制的原理和应用有所启发,并促进该领域的进一步研究和发展。
以上相关代码,程序地址:http://coupd.cn/670035618208.html















 2185
2185











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









