






nmpc非线性模型预测控制从原理到代码实践
包含4个案例
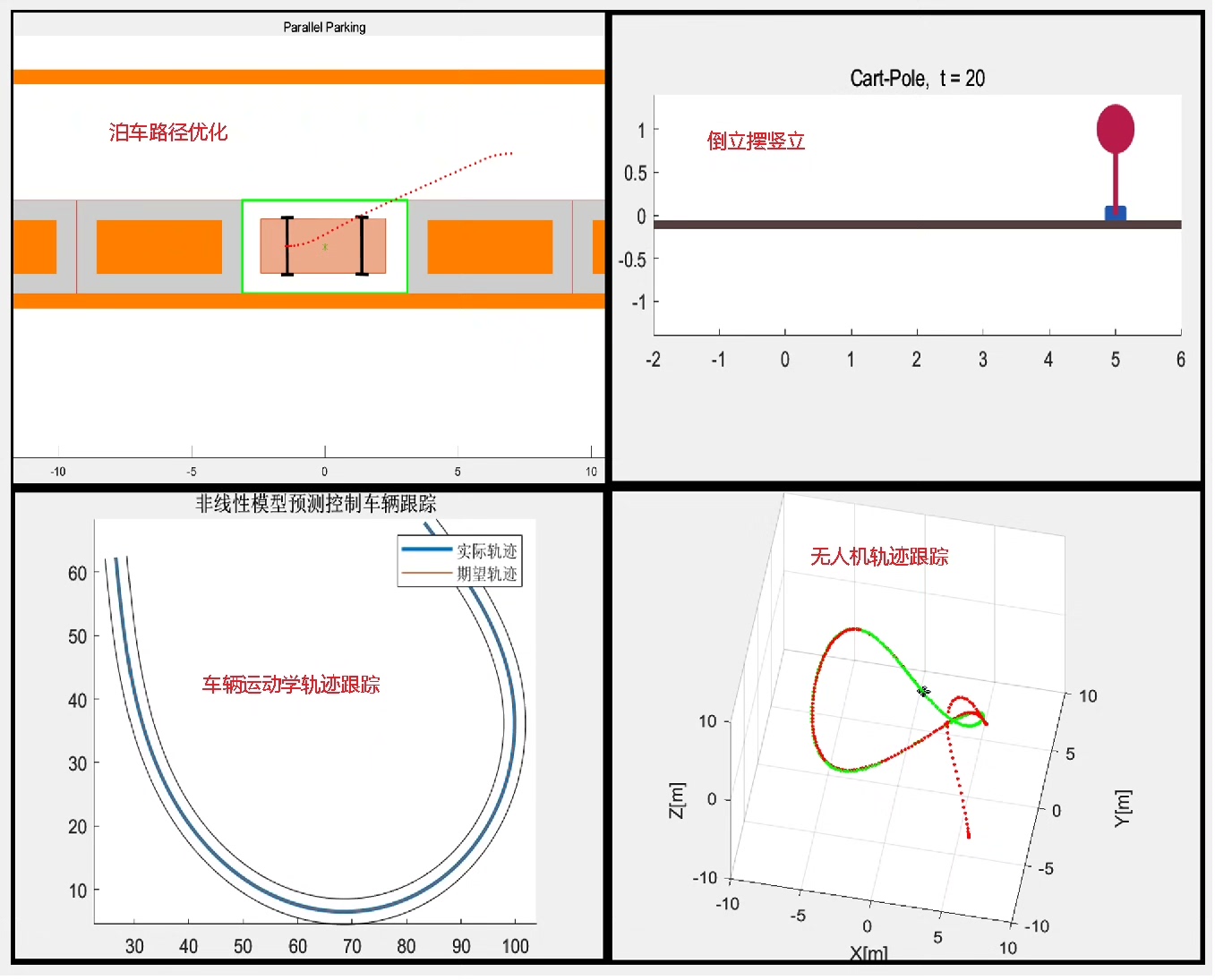
1 自动泊车轨迹优化
2 倒立摆上翻控制
3 车辆运动学轨迹跟踪
4 四旋翼无人机轨迹跟踪
ID:3750686161467689
autorobot
NMPC(Nonlinear Model Predictive Control,非线性模型预测控制)作为一种先进的控制算法,广泛应用于各种实时控制系统中。本文将从原理到代码实践介绍NMPC的工作原理,并结合四个实际案例进行探讨。
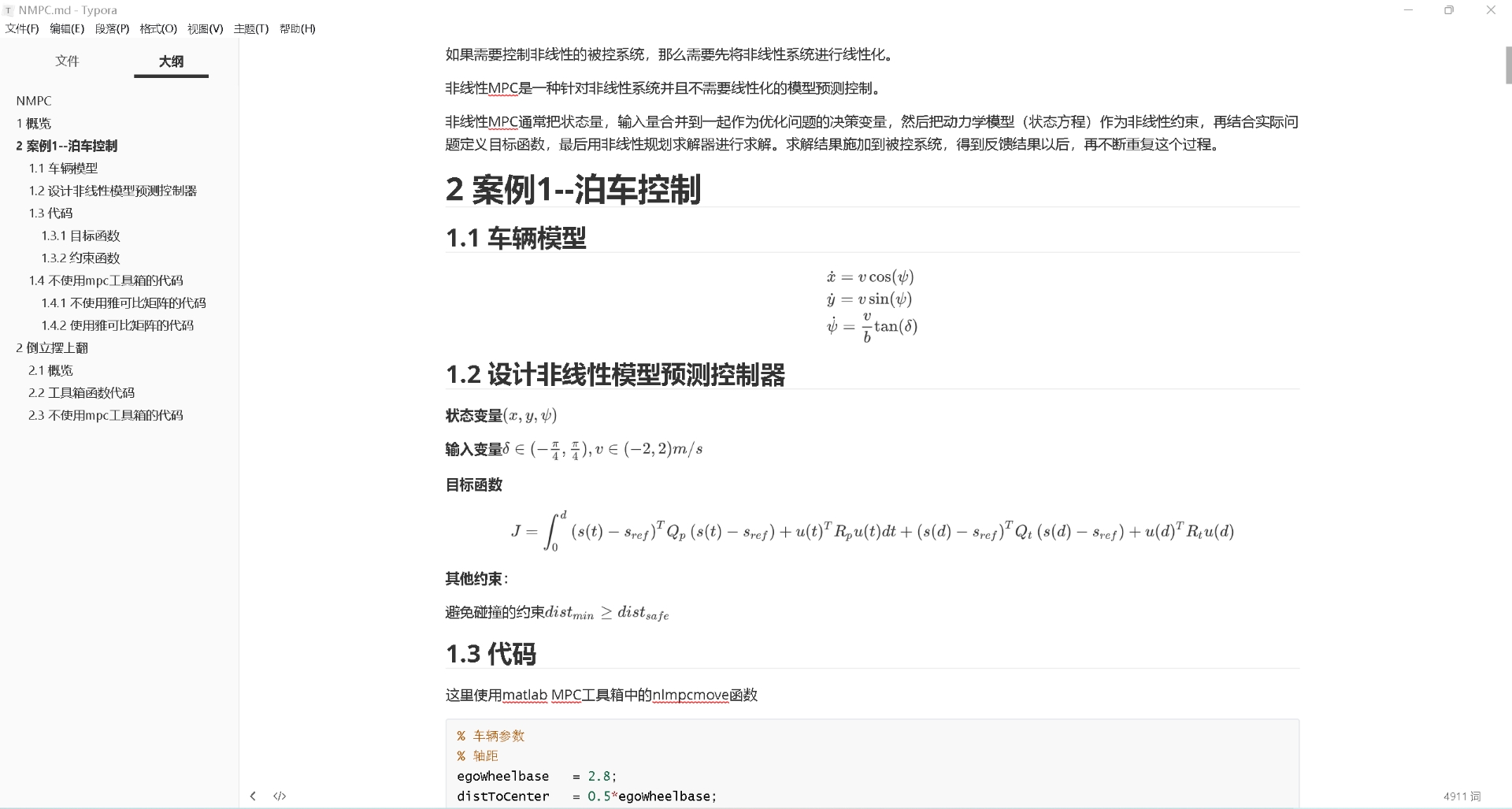
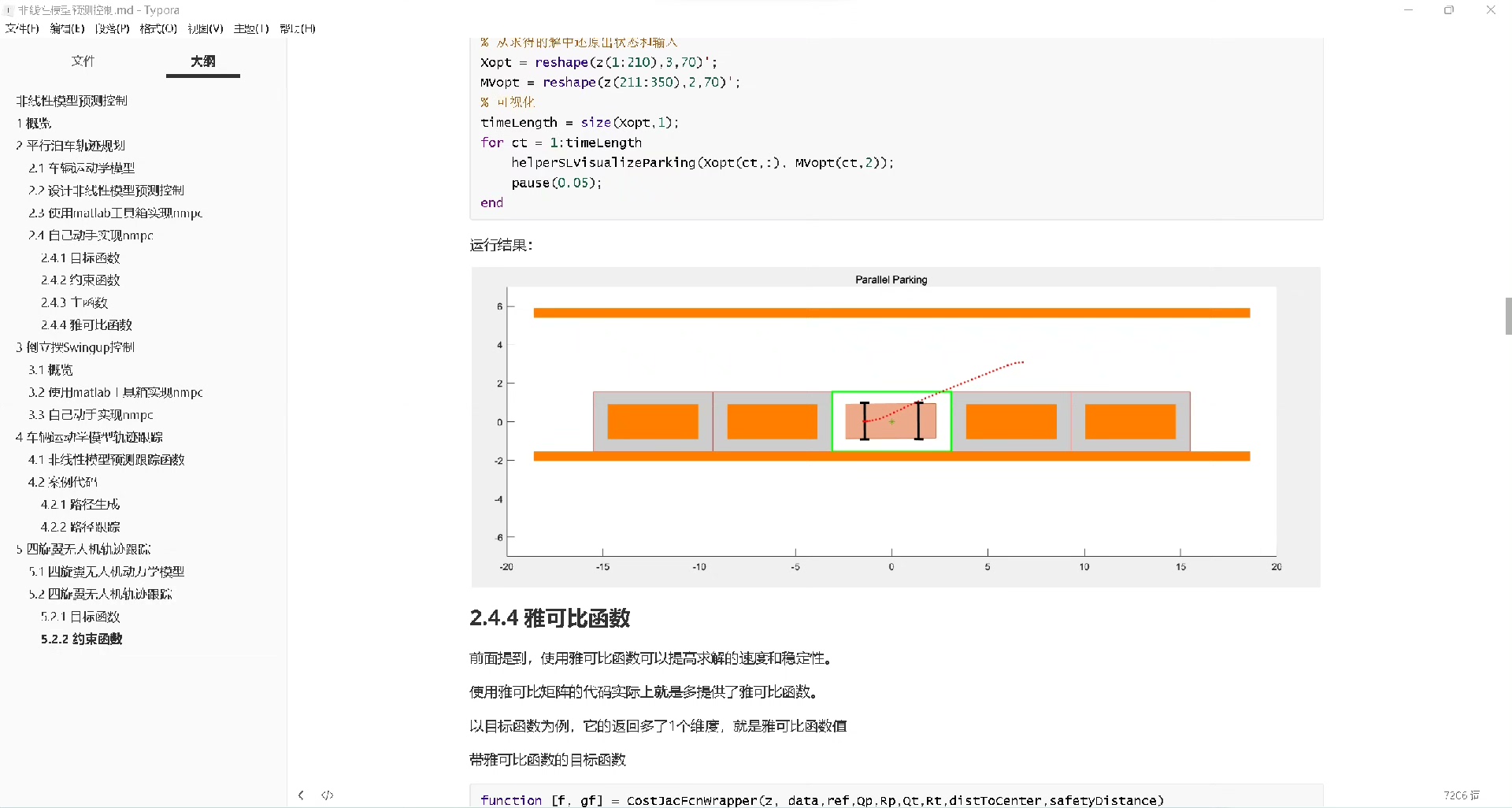
第一个案例是自动泊车轨迹优化,自动泊车系统是近年来汽车行业的热门研究方向。NMPC可以通过对车辆动力学进行建模,并优化轨迹规划,实现高效、安全的自动泊车。本文将详细介绍NMPC在自动泊车轨迹优化中的应用场景和技术细节,并通过实际案例验证其有效性。
第二个案例是倒立摆上翻控制,倒立摆是一个经典的控制问题。NMPC可以通过对倒立摆的非线性动力学模型进行建模,并实现对倒立摆的高精度控制。本文将详细介绍NMPC在倒立摆上翻控制中的应用原理和实现方法,并通过实验结果验证其控制效果。
第三个案例是车辆运动学轨迹跟踪,车辆在复杂的道路环境中实现高精度的轨迹跟踪是自动驾驶系统的一个重要任务。NMPC可以通过对车辆运动学模型进行建模,并进行轨迹优化,实现对车辆的精准控制。本文将详细介绍NMPC在车辆运动学轨迹跟踪中的应用原理和实现方法,并通过实际道路场景测试验证其控制性能。
第四个案例是四旋翼无人机轨迹跟踪,无人机的精确轨迹控制对于无人机应用领域至关重要。NMPC可以对四旋翼无人机进行动力学建模,并通过对轨迹进行优化,实现对无人机的高精度控制。本文将详细介绍NMPC在四旋翼无人机轨迹跟踪中的应用原理和实现方法,并通过实际飞行测试验证其控制效果。
通过以上四个案例,本文全面展示了NMPC在不同实际控制问题中的应用。从自动泊车到倒立摆、车辆运动学轨迹跟踪再到四旋翼无人机轨迹跟踪,NMPC在各个领域都取得了显著的控制性能。通过对NMPC算法的原理和实现方法进行深入剖析,并结合实际案例,本文为读者提供了一个全面了解NMPC的机会。
总结起来,NMPC的应用不仅限于传统的线性控制问题,而是在非线性、实时控制系统中具有广泛的应用前景。通过将NMPC与各种实际问题相结合,可以进一步提高系统的控制性能和稳定性。本文的目的是通过对NMPC的原理和实践案例的介绍,为读者提供一个深入了解NMPC的机会,并鼓励读者在实际项目中尝试应用NMPC算法,推动控制领域的发展。
【相关代码 程序地址】: http://nodep.cn/686161467689.html















 805
805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









