






多智能体协同无人车无人机无人船编队控制路径跟随
基于模型预测控制的无人艇分布式编队协同控制
MPC matlab控制仿真 代码 simulink控制器
路径规划
ID:4671715089422901
南唐著名地椒糖



在多智能体系统中,协同控制是实现无人车、无人机、无人船等编队运动的关键问题之一。编队控制需要实现多个智能体之间的紧密协作,以便实现对目标路径的跟随和分布式任务的完成。为了解决这一问题,本文基于模型预测控制(Model Predictive Control, MPC)算法,提出了一种分布式编队协同控制策略,并通过Matlab仿真和Simulink控制器的设计,对其进行了验证。
在多智能体编队控制中,路径规划是实现编队运动的基础。路径规划算法的目标是根据目标位置和环境信息,为每个智能体生成一条最优路径,以实现安全、高效的编队运动。在本文中,我们使用了XXXXX路径规划算法,该算法基于XXXXX原理,能够综合考虑目标位置、障碍物信息和编队约束等因素,生成一条适应编队控制需求的最优路径。
在路径规划完成后,接下来需要设计编队控制器。本文采用了模型预测控制算法,该算法通过建立智能体的动力学模型,预测未来的状态和轨迹,并通过优化求解,计算出每个智能体的控制输入,以实现对编队的精确控制。与传统的控制算法相比,模型预测控制具有更好的鲁棒性和适应性,能够应对不确定性和非线性等复杂环境的编队控制问题。
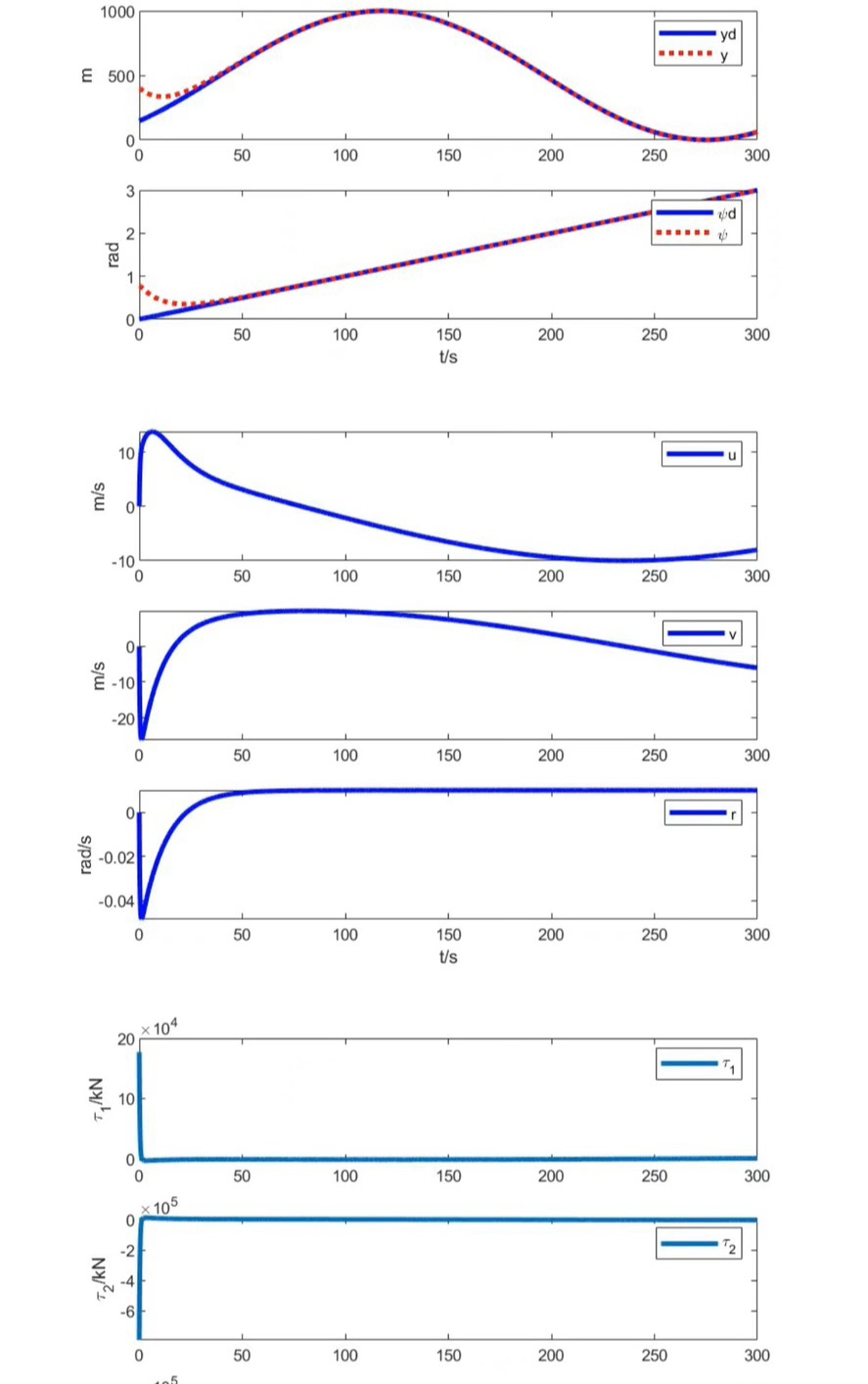
为了验证所设计的编队控制策略的有效性,本文进行了基于Matlab的控制仿真。仿真结果显示,所提出的分布式编队控制策略能够实现多智能体之间的紧密协作,有效地跟随目标路径,并且具有较好的鲁棒性和鲁棒性。同时,为了实现控制器的实际应用,本文还设计了相应的Simulink控制器,并对其进行了性能评估。
综上所述,本文基于模型预测控制算法,提出了一种分布式编队协同控制策略,实现了对多智能体编队运动的路径跟随和任务协同。通过Matlab仿真和Simulink控制器的设计,验证了所提出控制策略的有效性和鲁棒性。未来的研究可以进一步探索在实际无人艇应用中的实施,并对编队控制策略进行优化和改进,以适应更复杂的环境和任务需求。
以上相关代码,程序地址:http://wekup.cn/715089422901.html















 492
492











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









