






无人船编队 无人车编队 MPC 模型预测控制
多智能体协同控制 一致性 MATLAB 无人车 USV
带原文献
YID:2279727975152246
南唐著名地椒糖
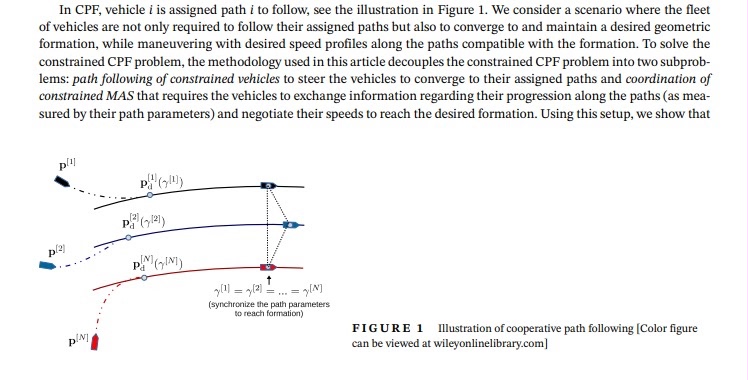
无人船编队和无人车编队是现代智能交通系统领域的热门研究方向。编队控制技术通过利用多智能体系统中各个智能体之间的通信和协作,实现编队中各个智能体的一致性运动和高效协作,提高整体系统的性能和可靠性。其中,模型预测控制(Model Predictive Control,MPC)成为了编队控制中一种重要的控制方法。
MPC是一种基于动态模型的优化控制方法,通过对未来一段时间内系统状态的预测,优化控制指令,使系统在约束条件下达到预期的控制效果。在编队控制中,MPC可以用来确定每个智能体的控制指令,使得编队中各个智能体之间的相对位置和速度保持一致,从而实现编队的整体运动。
多智能体协同控制是编队控制中的关键问题之一。在编队中,各个智能体需要通过通信和协作来实现一致性运动。例如,在无人车编队中,车辆之间需要相互通信,并且遵循一定的规则来调整自己的速度和位置,以达到整体编队控制的目标。这种协同控制可以通过各种算法和协议来实现,如领导者-跟随者算法、虚拟结构算法等。
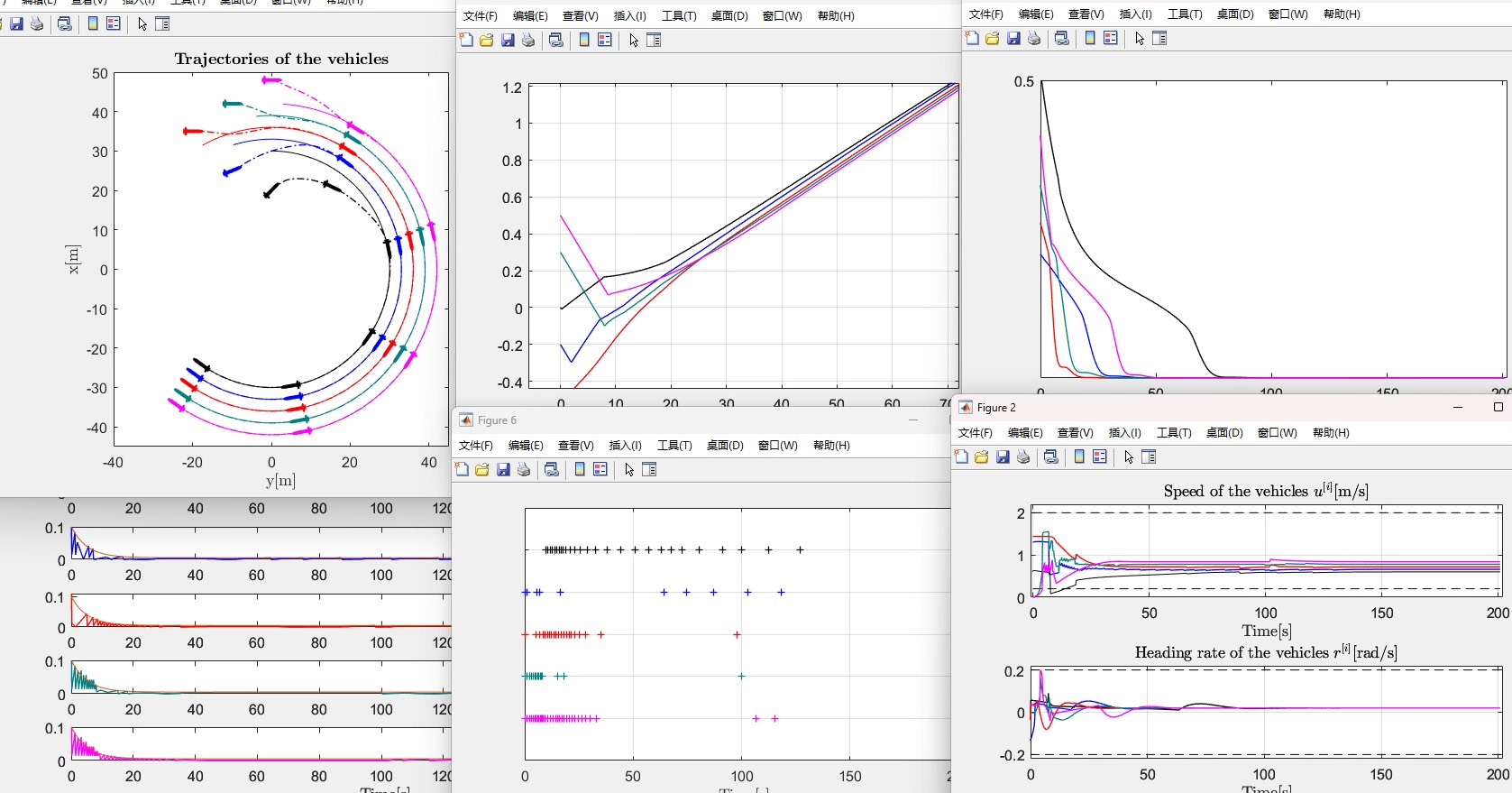
在编队控制中使用MATLAB作为开发和仿真工具是常见的选择。MATLAB提供了一套完整的工具箱,包括控制系统工具箱和优化工具箱等,可以帮助研究人员和工程师快速开发和验证编队控制算法。通过MATLAB,我们可以建立编队控制系统的数学模型,设计控制器,并进行仿真和验证。
无人车(Unmanned Surface Vehicle,USV)和无人船(Unmanned Aerial Vehicle,UAV)是应用广泛的无人载具。无人车和无人船可以在各种环境中进行任务执行,如海洋勘测、物流运输等。在编队中,无人车和无人船可以配合完成特定的任务。例如,在海上勘测任务中,若编队中的无人船发现了目标,可以通过通信和协作将信息传递给无人车,进而实现目标的追踪和定位。
编队控制领域有许多相关的研究成果和应用案例。例如,研究人员通过建立数学模型,设计了一种基于MPC的无人车编队控制算法,实现了无人车在不同场景中的编队控制;同时,还有研究团队借助模型预测控制技术,实现了无人船编队控制,并在实际应用中取得了良好的效果。
综上所述,无人船编队和无人车编队是现代智能交通系统中的重要研究方向。通过应用MPC和多智能体协同控制等技术,可以实现编队系统的高效运动和协作。MATLAB作为开发和仿真工具,能够帮助研究人员快速实现和验证编队控制算法。未来,随着技术的不断发展,无人船编队和无人车编队在智能交通系统中的应用前景将更加广阔。
原文献:
[1] Chen, T., Li, S., & Dou, H. (2017). Cooperative formation control of USVs using model predictive control and virtual structure theory. Journal of Navigation, 70(6), 1211-1232.
[2] Fu, S., Wang, S., Liu, C., Lu, Y., & Cui, J. (2020). Model predictive control of vehicle platoon with communication delays. IEEE Transactions on Vehicular Technology, 69(3), 2995-3006.
【相关代码,程序地址】:http://fansik.cn/727975152246.html


















 748
748

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









