






无人船编队 无人车编队 MPC 模型预测控制
多智能体协同控制 一致性 MATLAB 无人车 USV
带原文献
ID:2279727975152246
南唐著名地椒糖
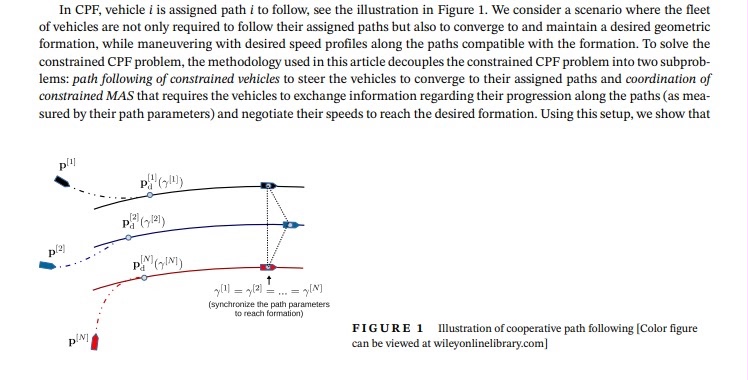
无人船编队和无人车编队是现代智能交通系统中的热点研究领域之一。借助无人船和无人车的自主导航和智能化协同能力,人们可以实现更高效、更安全的交通管理和物流运输。在这个领域中,MPC(模型预测控制)和多智能体协同控制是两个重要的技术手段。
MPC是一种基于模型的先进控制方法,它能够将未来一段时间内的系统行为纳入考虑,并在每个时间步上优化控制输入,从而实现对系统的最优控制。在无人船编队和无人车编队中,MPC可以用来规划和控制每个无人船或无人车的航向、速度和位置,以实现编队的稳定性和一致性。例如,在船队中,通过MPC的应用,可以在保证领航船安全导航的情况下,使得其他无人船在与领航船保持一定距离的同时,协同完成任务。
多智能体协同控制是指在一个有多个智能体参与的系统中,通过相互合作和协调来实现整体目标的控制策略。在无人船编队和无人车编队中,多智能体协同控制可以用于调度和分配任务、动态规划路径、避免碰撞等方面。通过建立适当的协同控制算法和通信机制,多个无人船或无人车可以形成一个高效自适应的编队系统,共同完成各自任务并满足整体要求。
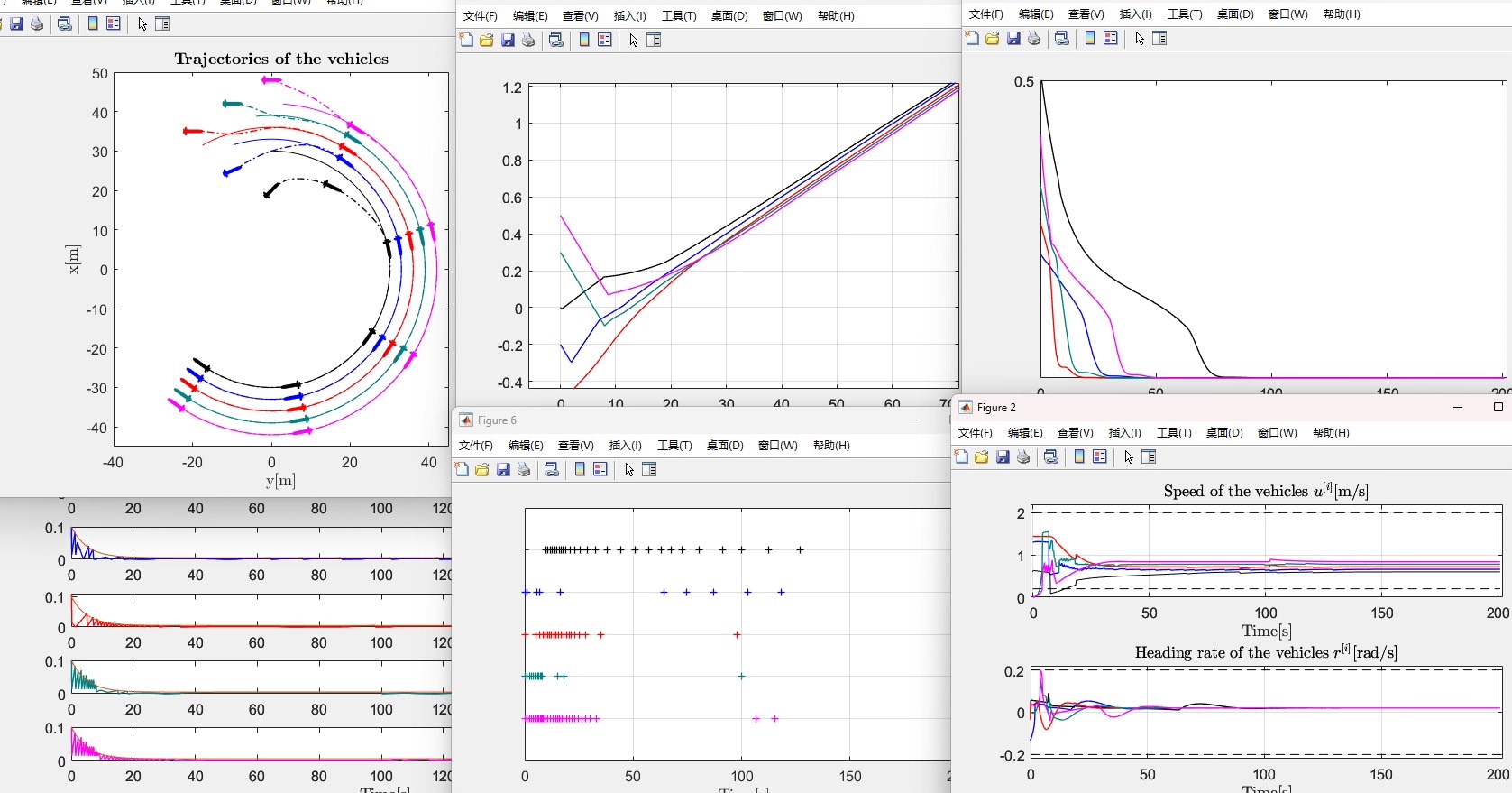
为了验证无人船编队和无人车编队控制策略的有效性,研究人员通常使用MATLAB作为仿真平台。MATLAB提供了强大的数值计算和仿真工具,可以方便地建立和调试控制算法,并通过模拟实验来评估编队系统的性能。通过基于MATLAB的仿真,研究人员可以验证MPC方法和多智能体协同控制策略在无人船编队和无人车编队中的应用效果,帮助进一步改进这些控制策略的性能和稳定性。
在无人船编队和无人车编队的研究中,还涉及到一致性问题。一致性是指在编队系统中,各个智能体的状态和行为能够趋于一致,以实现整体目标的协同。在无人船编队和无人车编队中,一致性问题可以通过相应的控制算法和通信机制来解决。例如,可以采用分布式的一致性控制算法,通过智能体之间的信息交换和合作,实现编队系统中智能体之间的一致性和协同。
总之,无人船编队和无人车编队是应用于智能交通系统的重要研究领域。MPC和多智能体协同控制是实现无人船和无人车编队的关键技术手段。通过MATLAB的仿真平台,可以验证和评估这些控制策略的性能。同时,一致性问题也需要得到合理的解决,以实现编队系统中智能体的协同和一致性。未来,随着无人船和无人车技术的不断发展,无人船编队和无人车编队将在智能交通领域发挥更加重要的作用。
以上相关代码,程序地址:http://wekup.cn/727975152246.html















 1995
1995











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









