







此文章提供了一个通用的函数接口,仅需配置相关IO。基于Hal库开发。
一、硬件及接线说明
1.1 硬件平台
-
控制芯片:STM32F103ZET6
-
电机驱动:TB6612
-
电机类型:520编码器电机(12V 110RPM 减速比90)
1.2 接线说明
- PWMA —— PE9(TIM1通道1)
- STBY —— PF0
- AIN1 —— PF1
- AIN2 —— PF2
- 编码器A相 —— PA1(TIM2编码器模式)
- 编码器B相 —— PA0(TIM2编码器模式)
- TIM6:产生1ms定时器中断(无需接线)
二、CUBEMX配置
2.1 新建工程,配置时钟频率为72MHz
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-gjc8pXwn-1665843283351)(C:\Users\acer\AppData\Roaming\Typora\typora-user-images\image-20221015215919096.png)]](https://img-blog.csdnimg.cn/718e8d501cbe42a681afc883e781ac33.png)
2.2 配置RCC,使用外部高速晶振
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-SWszCTgM-1665843142224)(C:\Users\acer\AppData\Roaming\Typora\typora-user-images\image-20221015220013874.png)]](https://img-blog.csdnimg.cn/2c2b46a182864507b0f66efd32bb53fc.png)
2.3 Debug配置为Serial Wire模式
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-phChakkt-1665843142224)(C:\Users\acer\AppData\Roaming\Typora\typora-user-images\image-20221015220126536.png)]](https://img-blog.csdnimg.cn/78a719184f8e4c1fa7efde4fd3137156.png)
2.4 配置GPIO,PF0默认上拉
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Ktwz0IPL-1665843142225)(C:\Users\acer\AppData\Roaming\Typora\typora-user-images\image-20221015220213294.png)]](https://img-blog.csdnimg.cn/5d112773bc0c4f0980115e12fee05cae.png)
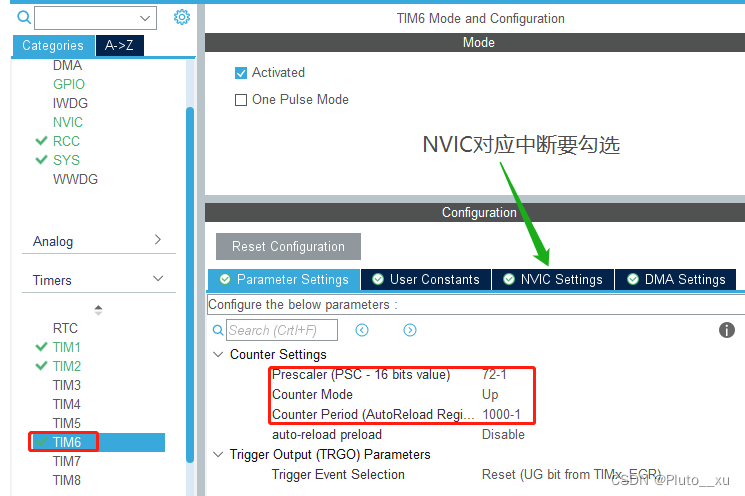
2.5 配置定时器
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-i9nbJTx8-1665843142226)(C:\Users\acer\AppData\Roaming\Typora\typora-user-images\image-20221015220324625.png)]](https://img-blog.csdnimg.cn/9b76cb6187b84d65ae0c70fe3bcd8f64.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-sOMyMyKV-1665843142227)(C:\Users\acer\AppData\Roaming\Typora\typora-user-images\image-20221015220623168.png)]](https://img-blog.csdnimg.cn/da89d50994cc4c688d35efac47f08c15.png)
配置完成后生成代码
三、代码实现
- encoder.c
/* 此文件为编码器电机闭环调试,包括速度环和位置环
* 配置:TIM2(PA0、PA1):编码器模式
* TIM1-CH1(PE9):PWM输出
* IN1:PF1
* IN2: PF2
* ENABLE: PF0
* 使用方法:1、初始化Motor_Init()
* 2、发送电流SetCurrent()
*/
#include "encoder.h"
encoderMotor_t encoderMoto[ENCODER_MOTO_COUNT]; //编码器电机结构体
pid_t Encoder_Motor_Pid_Pos[ENCODER_MOTO_COUNT]; //编码器电机位置环PID结构体
pid_t Encoder_Motor_Pid_Spd[ENCODER_MOTO_COUNT]; //编码器电机速度环PID结构体
void Motor_Init(void)
{
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL); //开启编码器定时器
__HAL_TIM_ENABLE_IT(&htim2,TIM_IT_UPDATE); //开启编码器定时器更新中断,防溢出处理
__HAL_TIM_SET_COUNTER(&htim2, 10000); //编码器定时器初始值设定为10000
encoderMoto[0].IOControl.htim_pwm = htim1;
encoderMoto[0].IOControl.IN1_Port = GPIOF;
encoderMoto[0].IOControl.IN2_Port = GPIOF;
encoderMoto[0].IOControl.IN1_Pin = GPIO_PIN_1;
encoderMoto[0].IOControl.IN2_Pin = GPIO_PIN_2;
}
//
/* 编码器电机发送电流函数
* motor:编码器电机参数结构体
* val:转动的速度或角度,SPEED最大为110,POSITION一圈为3960
* mode:模式选择:速度环:SPEED
* 位置环:POSITION
*/
void SetCurrent(encoderMotor_t *motor, int32_t val, uint32_t mode)
{
float pos_output,spd_output;
if(mode == 1)
spd_output = pid_calc(&Encoder_Motor_Pid_Spd[0], motor->speed, val);
else
{
pos_output = pid_calc(&Encoder_Motor_Pid_Pos[0], motor->totalAngle, val);
spd_output = pid_calc(&Encoder_Motor_Pid_Spd[0], motor->speed, pos_output);
}
if(spd_output > 0)
{
HAL_GPIO_WritePin(motor->IOControl.IN1_Port, motor->IOControl.IN1_Pin, GPIO_PIN_SET); //控制正反转
HAL_GPIO_WritePin(motor->IOControl.IN2_Port, motor->IOControl.IN2_Pin, GPIO_PIN_RESET);
__HAL_TIM_SET_COMPARE(&motor->IOControl.htim_pwm, TIM_CHANNEL_1, (uint32_t)(spd_output));
}
else
{
HAL_GPIO_WritePin(motor->IOControl.IN1_Port, motor->IOControl.IN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(motor->IOControl.IN2_Port, motor->IOControl.IN2_Pin, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&motor->IOControl.htim_pwm, TIM_CHANNEL_1, (uint32_t)(-spd_output));
}
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
static int16_t count = 0;
if(htim->Instance==htim6.Instance) //1ms中断
{
count++;
if(count >= 10)
{
count = 0;
int16_t pluse = COUNTERNUM - RELOADVALUE/2;
encoderMoto[0].totalAngle = pluse + encoderMoto[0].loopNum * RELOADVALUE/2;
encoderMoto[0].speed = (float)(encoderMoto[0].totalAngle - encoderMoto[0].lastAngle)/(4*PLUSE_OF_CIRCLE*RR)*6000; //进行速度计算,根据前文所说的,4倍频,编码器13位,减速比30,再乘以6000即为每分钟输出轴多少转
encoderMoto[0].lastAngle = encoderMoto[0].totalAngle; //更新转过的圈数
}
}
else if(htim->Instance == htim2.Instance) //如果是编码器更新中断,即10ms内,脉冲数超过了计数范围,需要进行处理
{
if(COUNTERNUM < 10000) encoderMoto[0].loopNum++;
else if(COUNTERNUM > 10000) encoderMoto[0].loopNum--;
__HAL_TIM_SetCounter(&htim2, 10000); //重新设定初始值
}
}
- encoder.h
#ifndef __ENCODER_H
#define __ENCODER_H
#include "tim.h"
#include "gpio.h"
#include "main.h"
#include "stm32_hal_legacy.h"
#include "pid.h"
#define ENCODER_MOTO_COUNT 1 //编码器电机数量
#define RR 90 //电机减速比
#define PLUSE_OF_CIRCLE 11
#define RELOADVALUE __HAL_TIM_GetAutoreload(&htim2) //获取自动装载值,本例中为20000
#define COUNTERNUM __HAL_TIM_GetCounter(&htim2) //获取编码器定时器中的计数值
#define MOTOR_1 1
enum{
POSITION = 0,
SPEED = 1,
};
/* 编码器电机接口定义结构体 */
typedef struct _IOControl
{
TIM_HandleTypeDef htim_encoder;
TIM_HandleTypeDef htim_pwm;
GPIO_TypeDef *IN1_Port;
GPIO_TypeDef *IN2_Port;
uint16_t IN1_Pin;
uint16_t IN2_Pin;
}IOControl_t;
/* 编码器电机参数结构体 */
typedef struct _EncoderMotor{
int8_t ID;
int16_t loopNum; //防超上限
int32_t lastAngle; //上1ms转的角度
int32_t totalAngle; //总角度
float speed; //电机输出轴转速,单位RPM
float set;
IOControl_t IOControl;
}encoderMotor_t;
extern encoderMotor_t encoderMoto[ENCODER_MOTO_COUNT];
extern pid_t Encoder_Motor_Pid_Pos[ENCODER_MOTO_COUNT]; //编码器电机位置环PID结构体
extern pid_t Encoder_Motor_Pid_Spd[ENCODER_MOTO_COUNT]; //编码器电机速度环PID结构体
void SetCurrent(encoderMotor_t *motor, int32_t val, uint32_t mode);
void Motor_Init(void);
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);
#endif
- pid.c
#include "pid.h"
void abs_limit(float *a, float ABS_MAX)
{
if(*a > ABS_MAX)
*a = ABS_MAX;
if(*a < -ABS_MAX)
*a = -ABS_MAX;
}
void PID_struct_init(pid_t* pid,
uint32_t maxout,
uint32_t intergral_limit,
float kp,
float ki,
float kd)
{
pid->IntegralLimit = intergral_limit;
pid->MaxOutput = maxout;
pid->p = kp;
pid->i = ki;
pid->d = kd;
}
float pid_calc(pid_t* pid, float get, float set)
{
pid->get = get;
pid->set = set;
pid->err = set - get; /*set - measure,得到偏差*/
pid->pout = pid->p * pid->err;
pid->iout += pid->i * pid->err;
pid->dout = pid->d * (pid->err - pid->lastError);
abs_limit(&(pid->iout), pid->IntegralLimit); /*积分限幅*/
pid->pos_out = pid->pout + pid->iout + pid->dout;
abs_limit(&(pid->pos_out), pid->MaxOutput); /*限定输出值的大小*/
/*更新数据*/
pid->lastError = pid->err;
return pid->pos_out; /*PID输出*/
}
- pid.h
#ifndef __PID_H_
#define __PID_H_
#include "main.h"
typedef struct __pid_t
{
float p,i,d;
float err,lastError; //误差
float set; //目标值
float get; //测量值
float pout; //P输出
float iout; //I输出
float dout; //D输出
float pos_out; //本次位置式输出,即 pos_out = pout + iout + dout
float last_pos_out; //上次位置式输出
uint32_t MaxOutput; //输出限幅
uint32_t IntegralLimit; //积分限幅
}pid_t;
void abs_limit(float *a, float ABS_MAX);
void PID_struct_init(pid_t* pid,
uint32_t maxout,
uint32_t intergral_limit,
float kp,
float ki,
float kd);
float pid_calc(pid_t* pid, float get, float set);
#endif
- main.c
#include "encoder.h"
#include "pid.h"
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM1_Init();
MX_TIM2_Init();
MX_TIM6_Init();
/*以上为cube生成*/
HAL_TIM_Base_Start_IT(&htim6); //开启1ms定时器中断
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
Motor_Init();
PID_struct_init(&Encoder_Motor_Pid_Pos[0], 100000, 1000, 0.2, 0.0, 0);
PID_struct_init(&Encoder_Motor_Pid_Spd[0], 1000, 1000, 30, 0.05, 0.01);
while (1)
{
SetCurrent(&encoderMoto[0], 20, SPEED);
}
}















 1112
1112











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









