







欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。
一项目简介
一、项目背景与意义
随着智能交通系统(ITS)和自动驾驶技术的快速发展,对车辆和行人进行准确、实时的跟踪成为了关键技术之一。这种技术不仅有助于提升道路安全性,还能为自动驾驶车辆提供重要的环境感知信息。本项目旨在利用Python和OpenCV库,开发一个能够实时跟踪智能汽车和行人的系统。
二、技术框架与工具
Python:作为项目的主要编程语言,Python提供了丰富的库和工具,便于数据处理和算法实现。
OpenCV:OpenCV是一个开源的计算机视觉库,提供了图像处理、目标检测、目标跟踪等功能,是实现本项目所需的关键工具。
三、项目实现原理
视频流获取:
使用OpenCV的VideoCapture类从监控摄像头或视频文件中获取实时或录制的视频流。
目标检测:
利用OpenCV的目标检测算法(如背景/前景分割、帧间差分法、Haar特征级联分类器或深度学习目标检测算法如YOLO、SSD)在视频帧中检测智能汽车和行人。
目标跟踪:
对于检测到的目标(智能汽车和行人),采用OpenCV的跟踪算法(如BOOSTING、MIL、KCF、TLD、MedianFlow或更先进的DeepSORT、ByteTrack等)进行跨帧跟踪。
这些跟踪算法能够在连续的帧中保持对目标的锁定,即使在目标发生遮挡或形状变化时也能保持跟踪。
轨迹记录与可视化:
记录每个目标的跟踪轨迹,并在视频帧上绘制出轨迹线,以便用户直观地观察目标的运动情况。
可以将轨迹数据保存到文件,用于后续的数据分析和处理。
性能优化:
对目标检测和跟踪算法进行优化,以提高系统的实时性和准确性。
可以通过调整算法参数、使用更高效的算法或使用GPU加速等方式来提升性能。
四、项目特点与优势
实时性:系统能够实时处理监控视频流,实现快速的目标检测和跟踪。
准确性:采用先进的计算机视觉算法和跟踪技术,能够准确识别和跟踪智能汽车和行人。
可扩展性:系统可以根据实际需求添加更多的目标类型或功能,如多目标跟踪、目标行为分析等。
可视化:提供直观的可视化界面,便于用户观察和分析目标的运动情况。
二、功能
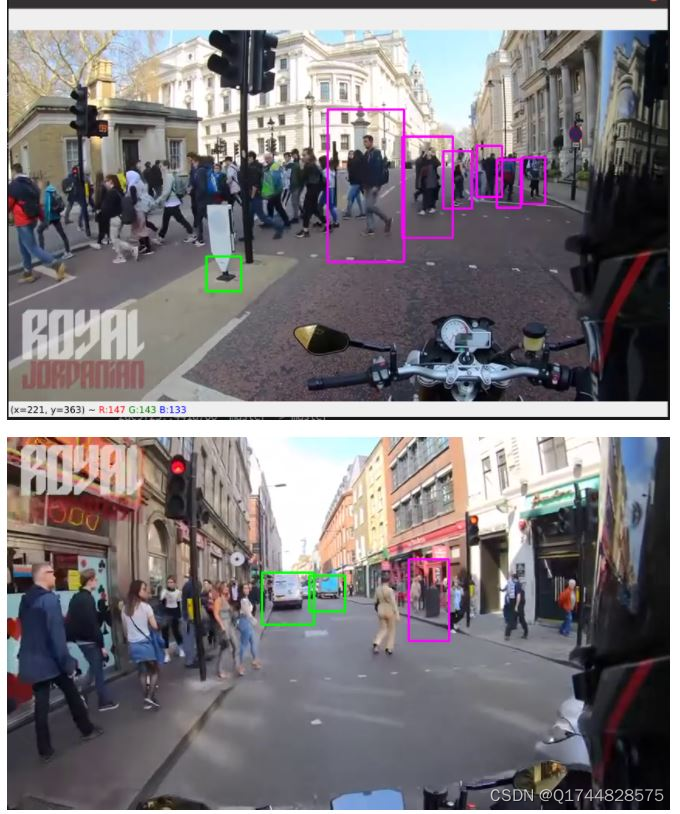
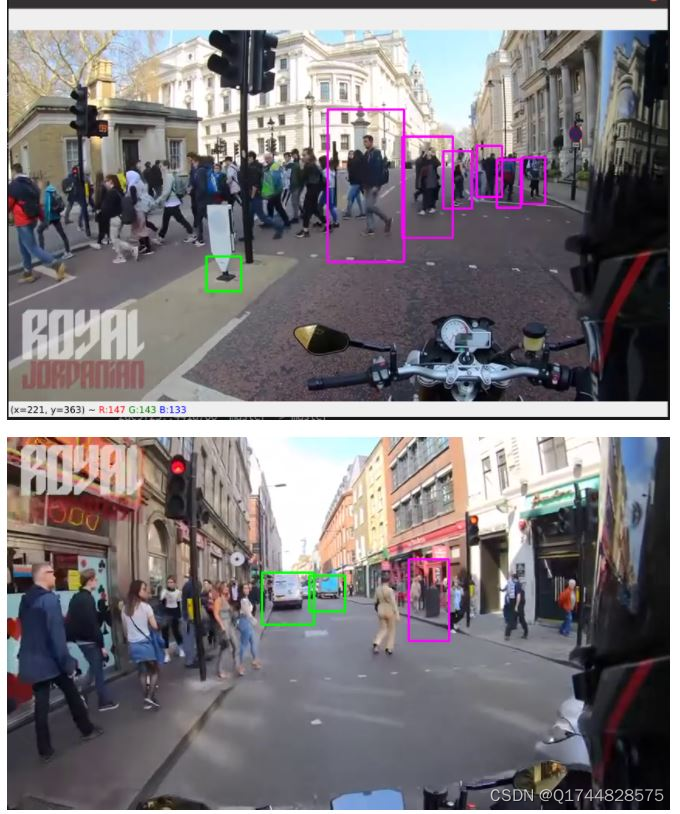
基于Python+OpenCV的人工智能汽车和行人跟踪
三、系统
四. 总结
智能交通系统:为智能交通系统提供实时的车辆和行人跟踪数据,有助于提升道路安全性和交通管理效率。
自动驾驶技术:为自动驾驶车辆提供重要的环境感知信息,帮助车辆实现更准确的路径规划和避障功能。
技术贡献:通过本项目的实施,可以推动计算机视觉和目标跟踪技术在智能交通和自动驾驶领域的应用和发展,为相关领域的研究人员提供实践经验和创新思路。















 1598
1598

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









