






自动驾驶横纵向耦合控制-复现Apollo横纵向控制
基于动力学误差模型,使用mpc算法,一个控制器同时控制横向和纵向,实现横纵向耦合控制
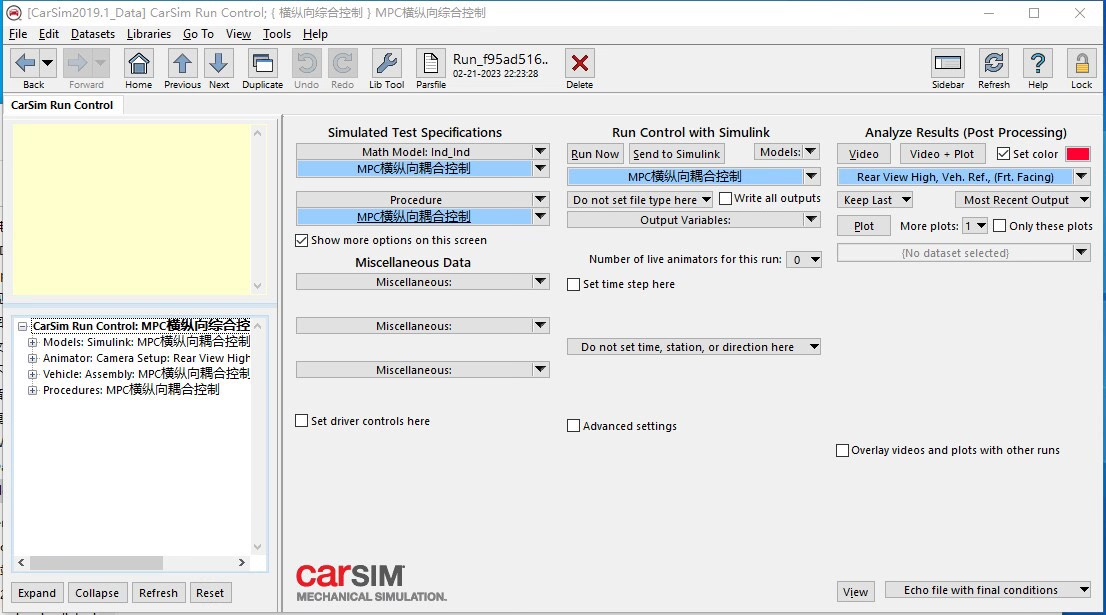
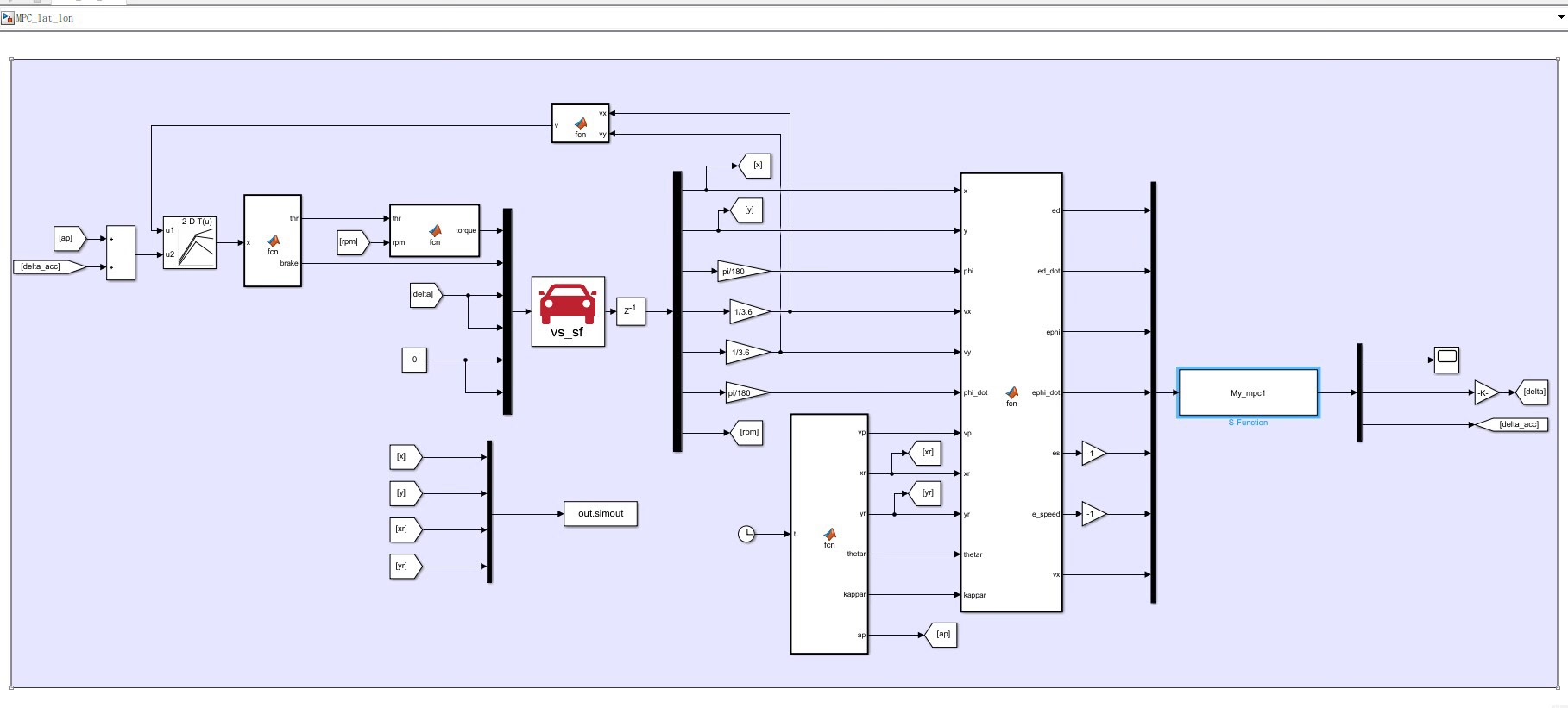
matlab与simulink联合仿真,纵向控制已经做好油门刹车标定表,跟踪五次多项式换道轨迹,效果完美。
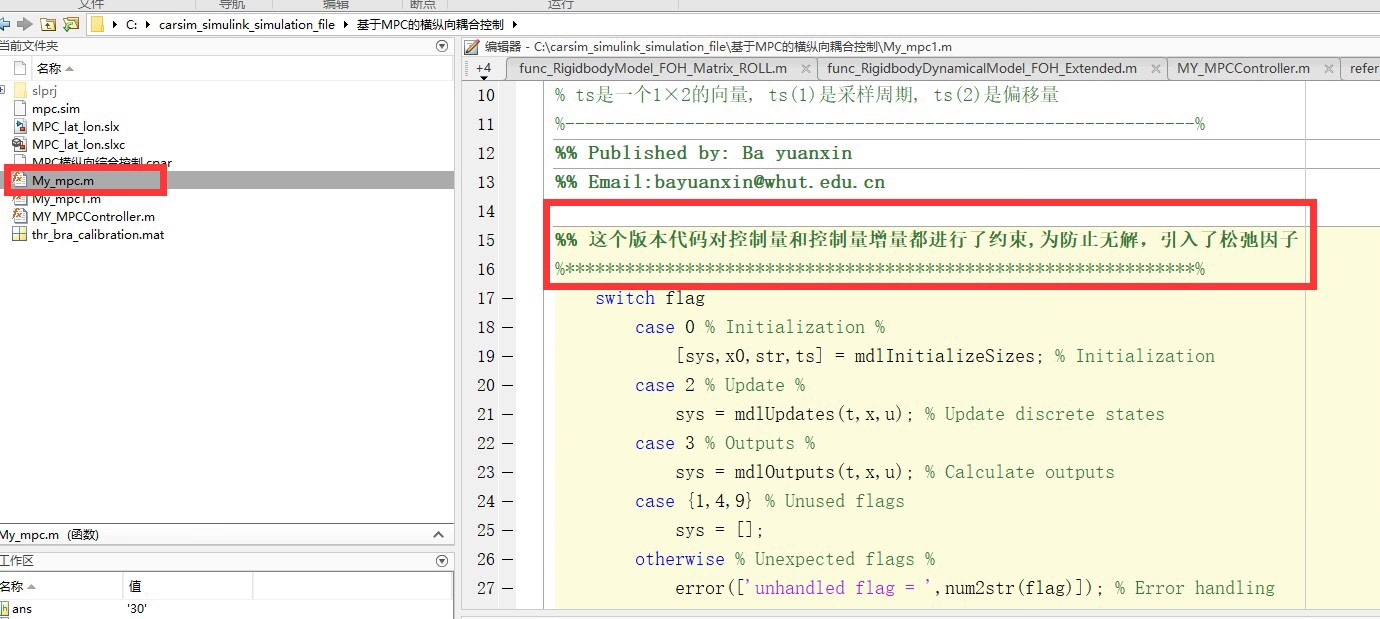
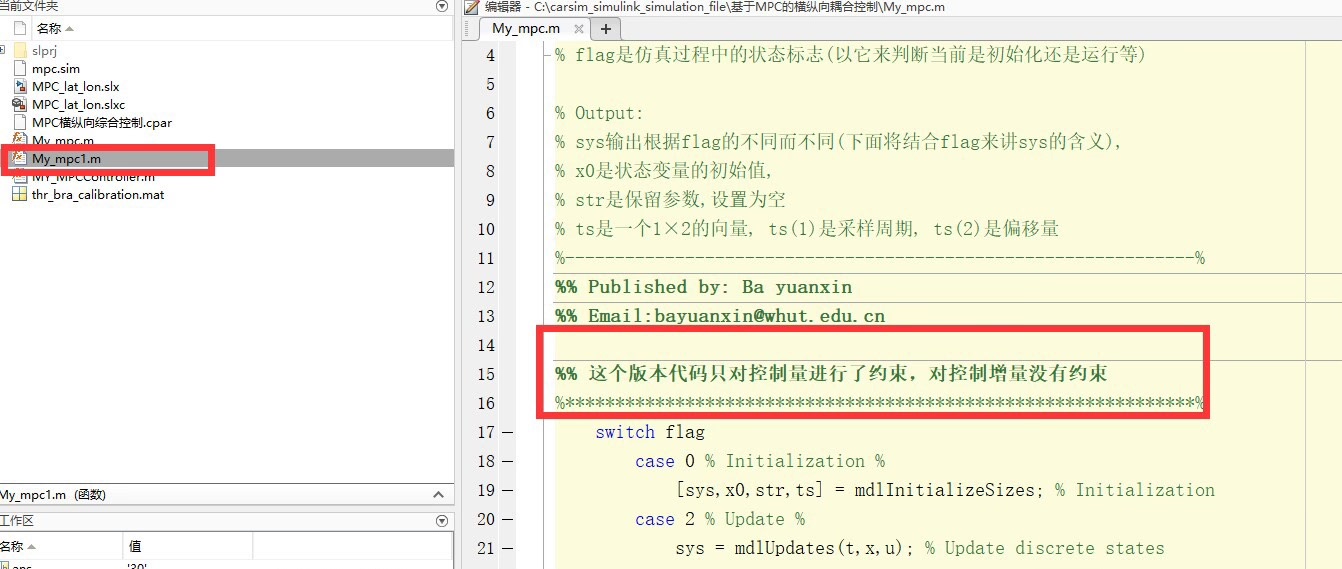
内含三套代码,两套采用面向对象编程-一套只对控制量添加约束,一套对控制量和控制增量均添加约束,另外一套采用面向过程编程。
YID:94120704691994255
xin123
近年来,自动驾驶技术得到了长足的发展,成为了汽车行业的热门研究领域之一。自动驾驶技术的发展离不开对横纵向控制的研究和优化。本文将围绕自动驾驶横纵向耦合控制的实现,以复现Apollo横纵向控制为主题展开讨论。
在自动驾驶系统中,横向控制和纵向控制是两个相对独立的模块,分别负责车辆的转向和加减速控制。而在实际驾驶中,横向和纵向控制是耦合在一起的,需要协同工作以实现安全和稳定的驾驶行为。因此,实现横纵向耦合控制是自动驾驶系统中的一项重要任务。
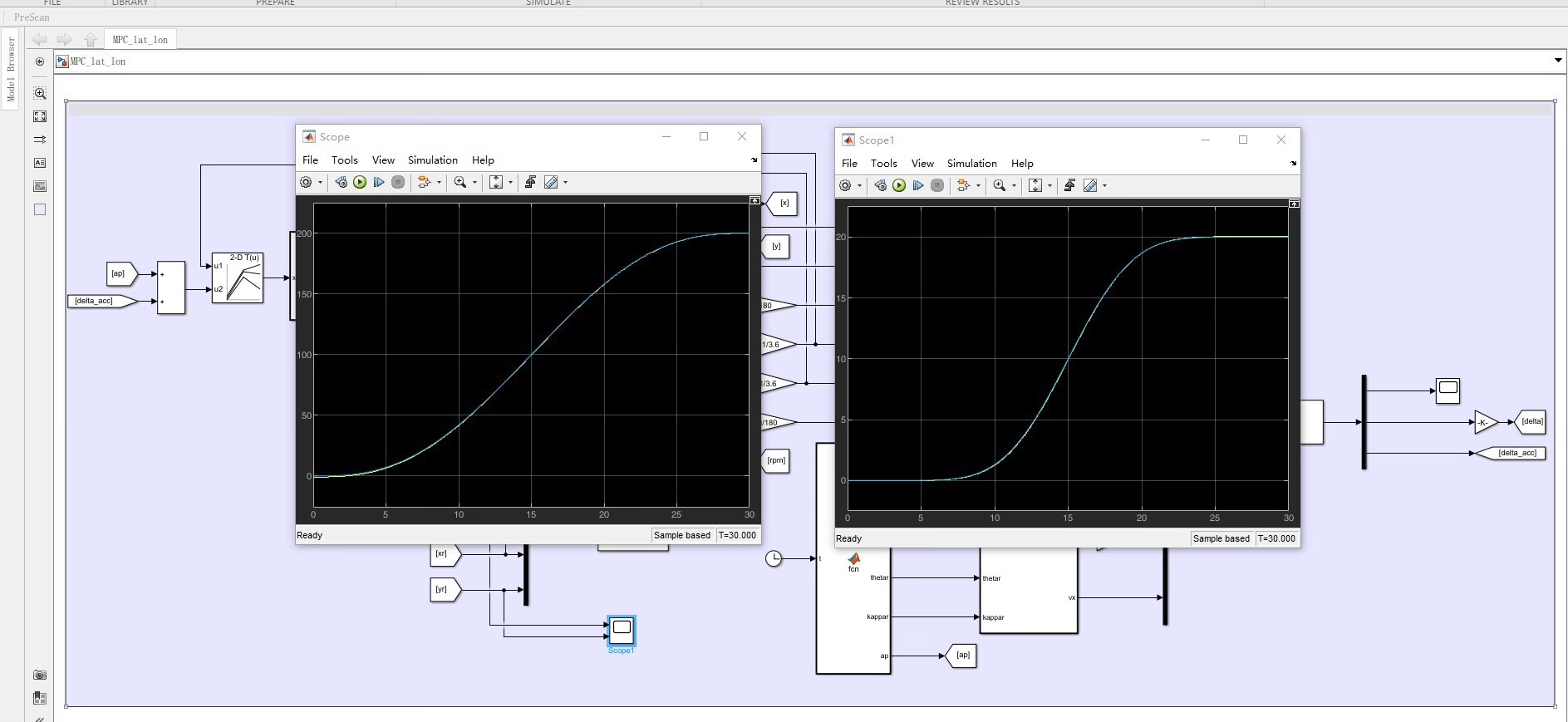
为了实现横纵向耦合控制,我们基于动力学误差模型,并使用了模型预测控制(MPC)算法。MPC算法通过对车辆动力学和控制目标的建模,能够对车辆的未来轨迹进行优化计算,并生成最优的控制指令。通过这种方式,我们可以实现对横向和纵向控制的统一优化,从而达到横纵向耦合控制的目的。
为了验证我们的横纵向耦合控制算法,我们进行了Matlab与Simulink联合仿真。在仿真实验中,我们已经完成了纵向控制部分的油门和刹车标定表,并使用五次多项式曲线作为横向控制的轨迹参考。通过仿真实验,我们可以观察到横纵向耦合控制的效果,并验证我们的控制算法的有效性。
在实现过程中,我们为读者提供了三套代码。其中,两套代码采用了面向对象编程的方法,分别对控制量和控制增量添加了约束。另外一套代码采用了面向过程编程的方式。通过这些代码,读者可以根据自己的需求选择适合的编程风格,加深对横纵向耦合控制的理解和实现。
总结起来,本文围绕自动驾驶横纵向耦合控制的实现进行了详细的论述。通过基于动力学误差模型的控制算法和MPC算法的应用,我们成功实现了横纵向耦合控制。通过Matlab与Simulink联合仿真,我们验证了算法的有效性。同时,我们提供了多套代码供读者参考和学习。希望本文对广大开发者和科研人员在自动驾驶横纵向耦合控制的研究和应用中起到一定的指导作用。
以上相关代码,程序地址:http://wekup.cn/704691994255.html















 113
113











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









