






自动驾驶横纵向耦合控制-复现Apollo横纵向控制
基于动力学误差模型,使用mpc算法,一个控制器同时控制横向和纵向,实现横纵向耦合控制
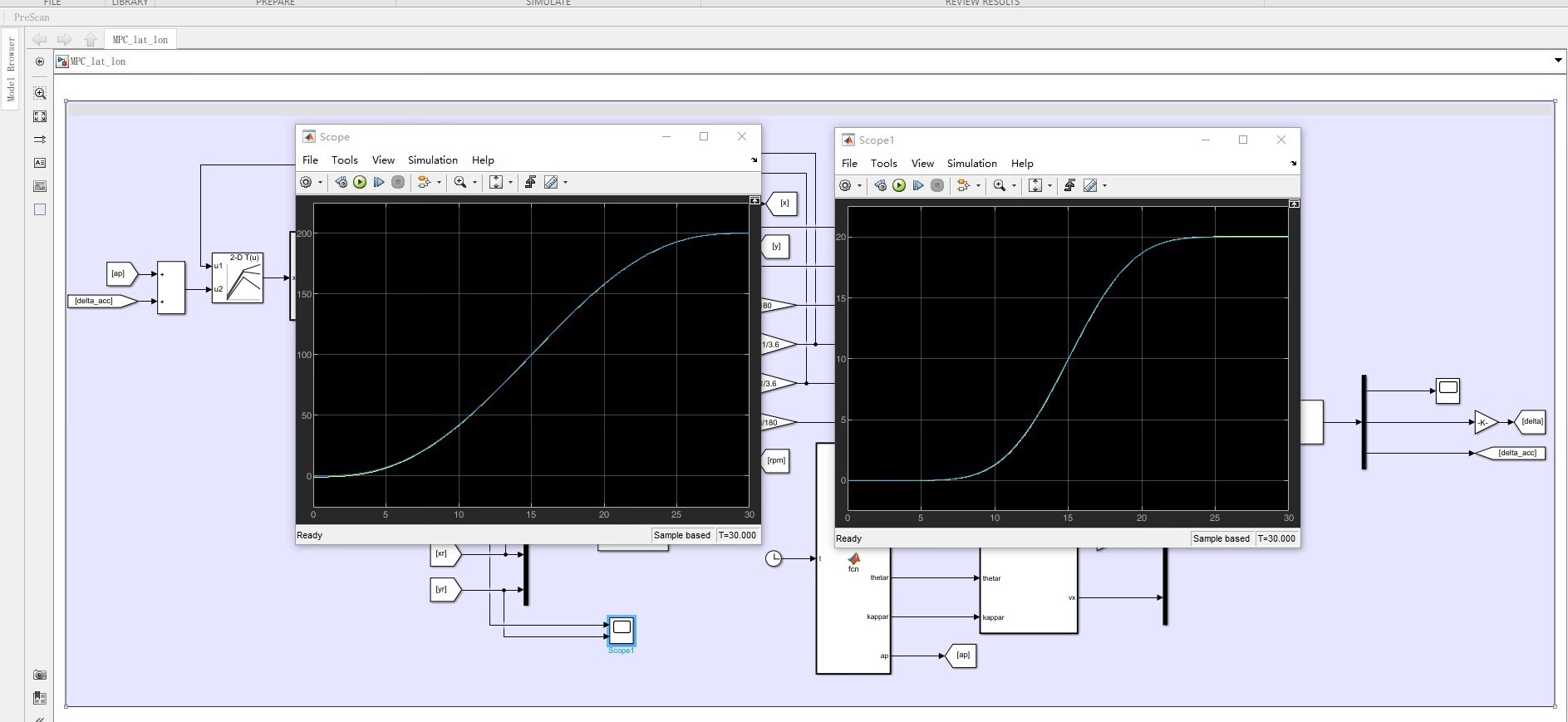
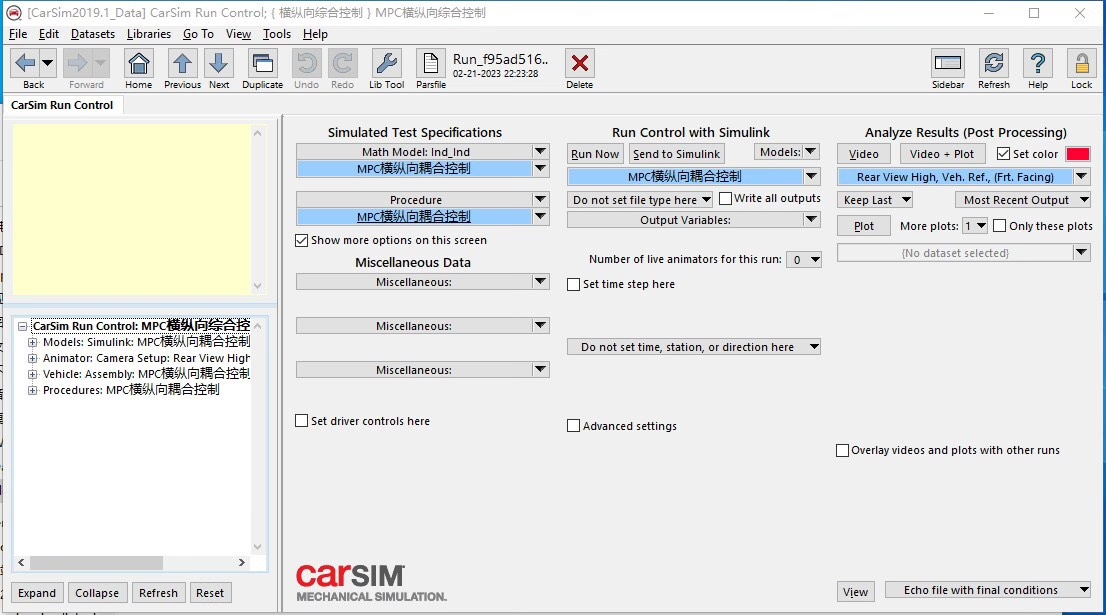
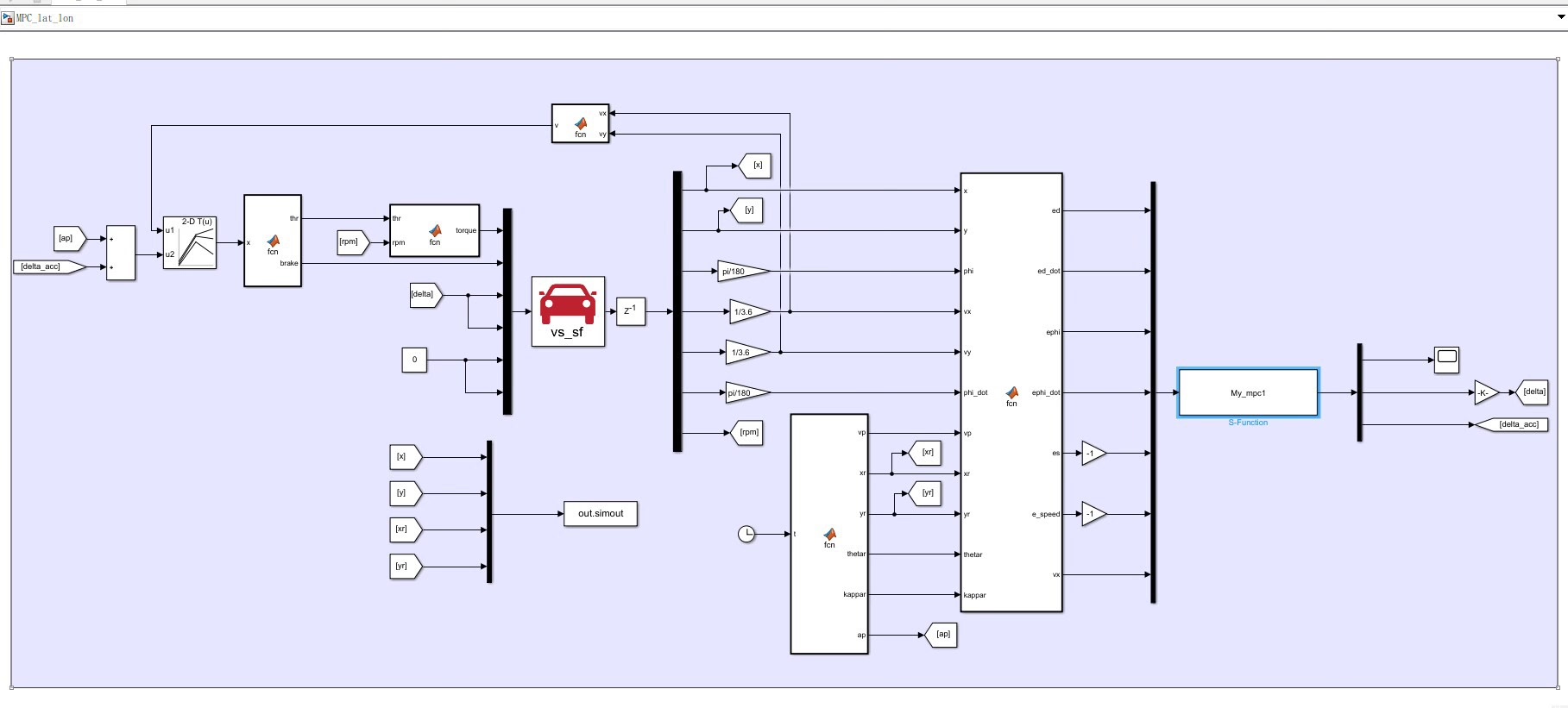
matlab与simulink联合仿真,纵向控制已经做好油门刹车标定表,跟踪五次多项式换道轨迹,效果完美。
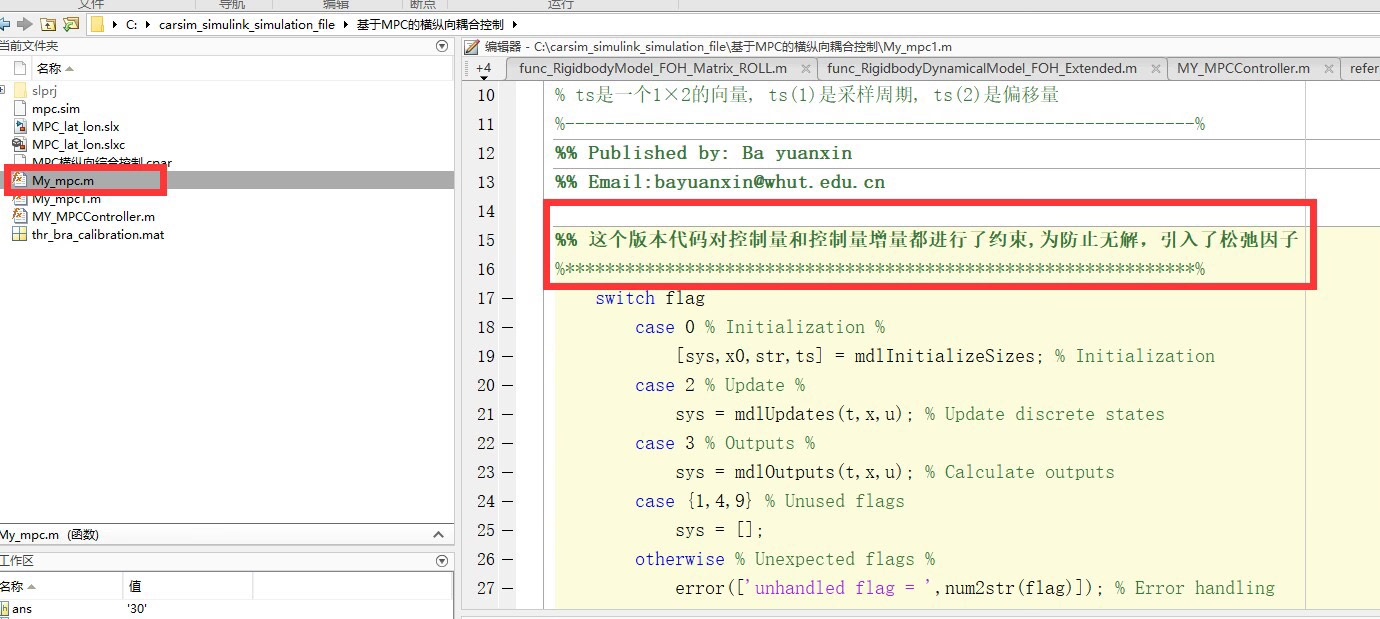
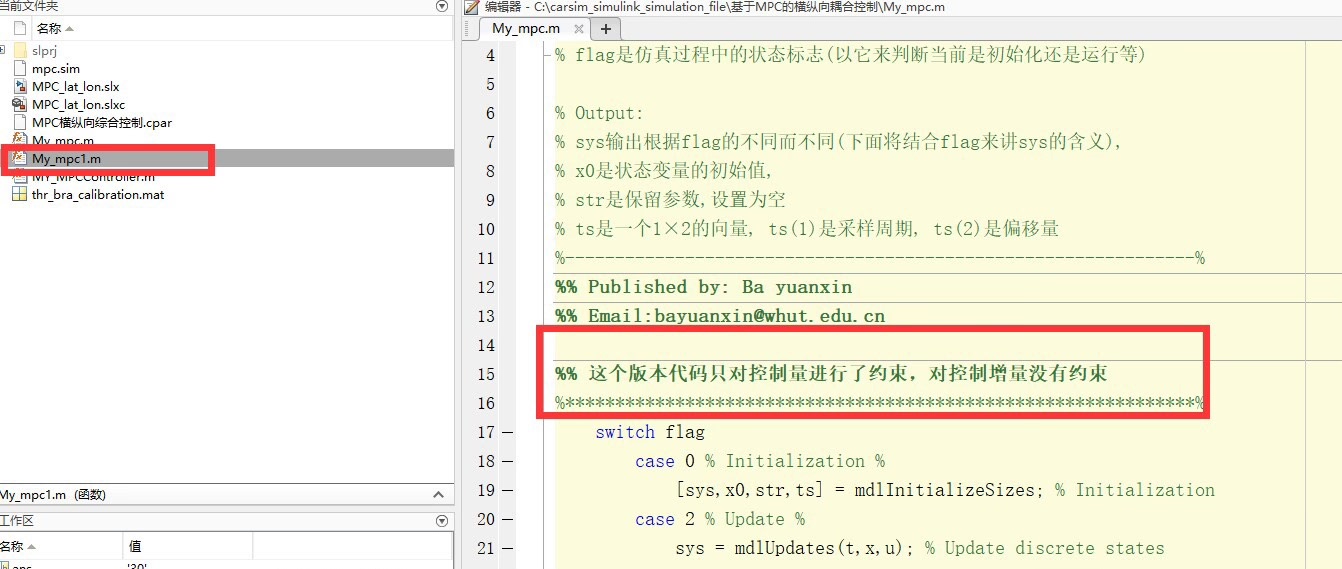
内含三套代码,两套采用面向对象编程-一套只对控制量添加约束,一套对控制量和控制增量均添加约束,另外一套采用面向过程编程。
YID:94120704691994255
xin123
自动驾驶技术在近年来取得了长足的发展,成为了人们关注的焦点之一。自动驾驶车辆的横纵向控制是实现其安全行驶的核心问题之一。本文将围绕自动驾驶横纵向耦合控制的复现以及相关算法展开讨论。
一、问题背景与动机
随着自动驾驶技术的进一步发展,横纵向控制的耦合问题成为了需要解决的一个核心技术难题。传统的纵向和横向控制方法存在着不可忽视的耦合性,因此需要采用一种能够同时控制横向和纵向的方法来解决这一问题。
二、控制器设计
本文采用基于动力学误差模型的控制器设计方法,并结合了模型预测控制(Model Predictive Control,MPC)算法。通过该方法,可以实现对自动驾驶车辆的横向和纵向控制。
三、仿真实验
本文选用了matlab与simulink联合进行仿真实验,通过内含的三套代码,分别采用面向对象编程和面向过程编程方法,实现了对控制量和控制增量添加约束的控制方法。其中,一套控制器只对控制量添加约束,另一套控制器同时对控制量和控制增量添加约束。
四、实验结果与分析
在仿真实验中,我们通过对纵向控制的油门和刹车标定表进行调整,并跟踪五次多项式换道轨迹,取得了较为满意的效果。通过对比不同控制器的仿真结果,可以看出添加约束的控制方法对自动驾驶车辆的横纵向控制具有较好的效果。
五、总结与展望
本文通过复现Apollo横纵向控制,实现了自动驾驶车辆的横纵向耦合控制,并通过仿真实验验证了相应的控制器设计的有效性。然而,本文的研究还存在一定的局限性,比如控制器设计方法可能还有待进一步改进,实验结果还需要在实际道路环境中进行验证等。因此,在未来的研究中,我们将进一步完善控制器设计方法,并进行更加真实的实验验证,以进一步提升自动驾驶车辆的控制能力。
通过以上的讨论,我们可以看出自动驾驶横纵向耦合控制是实现自动驾驶技术的重要环节之一。本文针对这一问题,基于动力学误差模型,采用mpc算法设计了一个同时控制横向和纵向的控制器,并通过matlab与simulink联合仿真实现了相应的控制效果。本文所提出的控制器设计方法可以为自动驾驶技术的进一步发展提供参考,同时也为相关研究和应用提供了一定的理论基础。在未来的研究中,我们将进一步完善控制器设计方法,并通过更加真实的实验验证来进一步提升自动驾驶车辆的控制性能。
相关的代码,程序地址如下:http://nodep.cn/704691994255.html
















 607
607











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









